|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
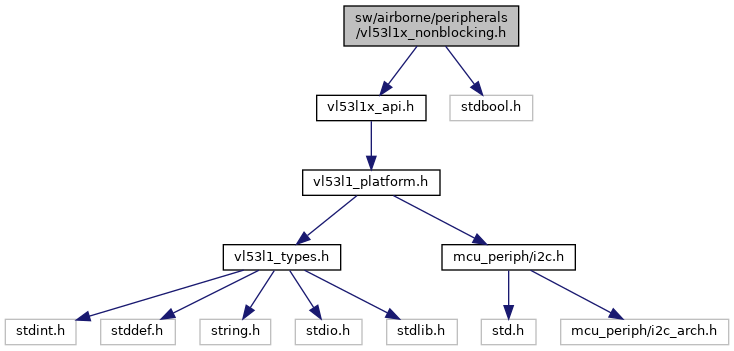
Non-blocking runtime functions for the VL53L1X. More...
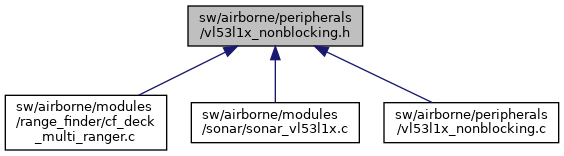
 Include dependency graph for vl53l1x_nonblocking.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for vl53l1x_nonblocking.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| bool | VL53L1X_NonBlocking_CheckForDataReady (VL53L1_DEV dev, uint8_t *isDataReady) |
| This function checks if the new ranging data is available by polling the dedicated register. | |
| bool | VL53L1X_NonBlocking_GetRangeStatus (VL53L1_DEV dev, uint8_t *rangeStatus) |
| This function returns the range status to discard wrong measurments. | |
| bool | VL53L1X_NonBlocking_GetDistance (VL53L1_DEV dev, uint16_t *distance) |
| This function returns the distance measured by the sensor in mm. | |
| bool | VL53L1X_NonBlocking_ClearInterrupt (VL53L1_DEV dev) |
| This function clears the interrupt, to be called after a ranging data reading to arm the interrupt for the next data ready event. | |
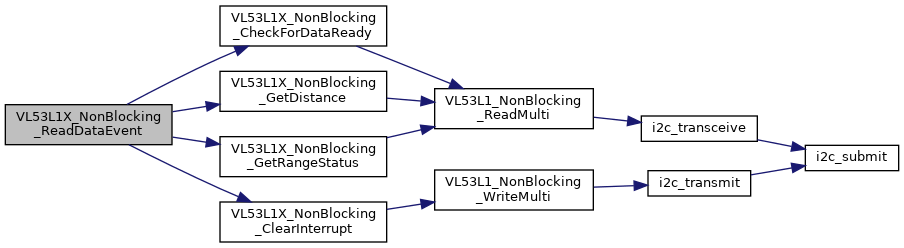
| bool | VL53L1X_NonBlocking_ReadDataEvent (VL53L1_DEV dev, uint16_t *distance_mm, bool *new_data) |
| Implement non-blocking read sequence The data reading actually starts when the read_state is set to VL53L1_READ_DATA_READY using VL53L1X_NonBlocking_RequestData() | |
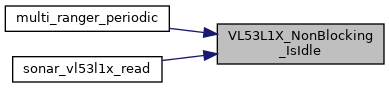
| bool | VL53L1X_NonBlocking_IsIdle (VL53L1_DEV dev) |
| Test is read status is on idle. | |
| bool | VL53L1X_NonBlocking_RequestData (VL53L1_DEV dev) |
| Request a new reading. | |
Non-blocking runtime functions for the VL53L1X.
Definition in file vl53l1x_nonblocking.h.
| bool VL53L1X_NonBlocking_CheckForDataReady | ( | VL53L1_DEV | dev, |
| uint8_t * | isDataReady | ||
| ) |
This function checks if the new ranging data is available by polling the dedicated register.
| isDataReady==0 -> not ready; isDataReady==1 -> ready |
Definition at line 89 of file vl53l1x_nonblocking.c.
References dev, foo, GPIO__TIO_HV_STATUS, GPIO_HV_MUX__CTRL, and VL53L1_NonBlocking_ReadMulti().
Referenced by VL53L1X_NonBlocking_ReadDataEvent().
Here is the call graph for this function: Here is the caller graph for this function:| bool VL53L1X_NonBlocking_ClearInterrupt | ( | VL53L1_DEV | dev | ) |
This function clears the interrupt, to be called after a ranging data reading to arm the interrupt for the next data ready event.
Definition at line 138 of file vl53l1x_nonblocking.c.
References dev, SYSTEM__INTERRUPT_CLEAR, and VL53L1_NonBlocking_WriteMulti().
Referenced by VL53L1X_NonBlocking_ReadDataEvent().
Here is the call graph for this function: Here is the caller graph for this function:| bool VL53L1X_NonBlocking_GetDistance | ( | VL53L1_DEV | dev, |
| uint16_t * | distance | ||
| ) |
This function returns the distance measured by the sensor in mm.
Definition at line 128 of file vl53l1x_nonblocking.c.
References dev, foo, VL53L1_NonBlocking_ReadMulti(), and VL53L1_RESULT__FINAL_CROSSTALK_CORRECTED_RANGE_MM_SD0.
Referenced by VL53L1X_NonBlocking_ReadDataEvent().
Here is the call graph for this function: Here is the caller graph for this function:| bool VL53L1X_NonBlocking_GetRangeStatus | ( | VL53L1_DEV | dev, |
| uint8_t * | rangeStatus | ||
| ) |
This function returns the range status to discard wrong measurments.
| rangeStatus (0:no error, 1:sigma failed, 2:signal failed, ..., 7:wrap-around) |
Definition at line 115 of file vl53l1x_nonblocking.c.
References dev, foo, status_rtn, VL53L1_NonBlocking_ReadMulti(), and VL53L1_RESULT__RANGE_STATUS.
Referenced by VL53L1X_NonBlocking_ReadDataEvent().
Here is the call graph for this function: Here is the caller graph for this function:| bool VL53L1X_NonBlocking_IsIdle | ( | VL53L1_DEV | dev | ) |
Test is read status is on idle.
Definition at line 190 of file vl53l1x_nonblocking.c.
References dev, and VL53L1_READ_IDLE.
Referenced by multi_ranger_periodic(), and sonar_vl53l1x_read().
Here is the caller graph for this function:| bool VL53L1X_NonBlocking_ReadDataEvent | ( | VL53L1_DEV | dev, |
| uint16_t * | distance_mm, | ||
| bool * | new_data | ||
| ) |
Implement non-blocking read sequence The data reading actually starts when the read_state is set to VL53L1_READ_DATA_READY using VL53L1X_NonBlocking_RequestData()
| distance measurement in millimeter | |
| flag when a new data is available |
Definition at line 144 of file vl53l1x_nonblocking.c.
References dev, foo, VL53L1_CLEAR_INT, VL53L1_READ_DATA_READY, VL53L1_READ_DISTANCE, VL53L1_READ_IDLE, VL53L1_READ_STATUS, VL53L1X_NonBlocking_CheckForDataReady(), VL53L1X_NonBlocking_ClearInterrupt(), VL53L1X_NonBlocking_GetDistance(), and VL53L1X_NonBlocking_GetRangeStatus().
Referenced by multi_ranger_read(), and sonar_vl53l1x_event().
Here is the call graph for this function: Here is the caller graph for this function:| bool VL53L1X_NonBlocking_RequestData | ( | VL53L1_DEV | dev | ) |
Request a new reading.
Definition at line 195 of file vl53l1x_nonblocking.c.
References dev, and VL53L1_READ_DATA_READY.
Referenced by multi_ranger_periodic(), and sonar_vl53l1x_read().
Here is the caller graph for this function: