|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
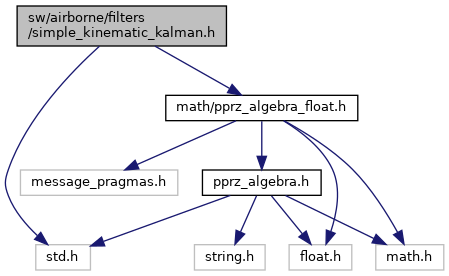
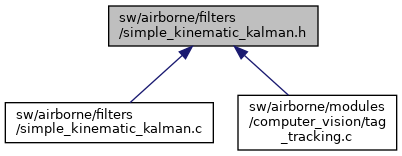
 Include dependency graph for simple_kinematic_kalman.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for simple_kinematic_kalman.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | SimpleKinematicKalman |
| Kalman structure. More... | |
Macros | |
| #define | SIMPLE_KINEMATIC_KALMAN_DIM 6 |
| #define | SIMPLE_KINEMATIC_KALMAN_SPEED_HORIZONTAL 1 |
| #define | SIMPLE_KINEMATIC_KALMAN_SPEED_VERTICAL 2 |
| #define | SIMPLE_KINEMATIC_KALMAN_SPEED_3D 3 |
Basic kinematic kalman filter for tag tracking and constant speed
Definition in file simple_kinematic_kalman.h.
| struct SimpleKinematicKalman |
Kalman structure.
state vector: X = [ x xd y yd z zd ]' command vector: U = 0 (constant velocity model) dynamic model: basic kinematic model x_k+1 = x_k + xd_k * dt measures: distance between (fixed and known) anchors and UAV
Definition at line 49 of file simple_kinematic_kalman.h.
| Data Fields | ||
|---|---|---|
| float | dt | prediction step (in seconds) |
| float | F[SIMPLE_KINEMATIC_KALMAN_DIM][SIMPLE_KINEMATIC_KALMAN_DIM] | dynamic matrix |
| float | Hp[SIMPLE_KINEMATIC_KALMAN_DIM/2][SIMPLE_KINEMATIC_KALMAN_DIM] | observation matrix for position |
| float | Hs[SIMPLE_KINEMATIC_KALMAN_DIM/2][SIMPLE_KINEMATIC_KALMAN_DIM] | observation matrix for speed |
| float | P[SIMPLE_KINEMATIC_KALMAN_DIM][SIMPLE_KINEMATIC_KALMAN_DIM] | covariance matrix |
| float | Q[SIMPLE_KINEMATIC_KALMAN_DIM][SIMPLE_KINEMATIC_KALMAN_DIM] | process noise matrix |
| float | r | measurement noise (assumed the same for all anchors) |
| float | state[SIMPLE_KINEMATIC_KALMAN_DIM] | state vector |
| #define SIMPLE_KINEMATIC_KALMAN_DIM 6 |
Definition at line 34 of file simple_kinematic_kalman.h.
| #define SIMPLE_KINEMATIC_KALMAN_SPEED_3D 3 |
Definition at line 39 of file simple_kinematic_kalman.h.
| #define SIMPLE_KINEMATIC_KALMAN_SPEED_HORIZONTAL 1 |
Definition at line 37 of file simple_kinematic_kalman.h.
| #define SIMPLE_KINEMATIC_KALMAN_SPEED_VERTICAL 2 |
Definition at line 38 of file simple_kinematic_kalman.h.
|
extern |
Get current pos.
| [in] | kalman | SimpleKinematicKalman structure |
Definition at line 114 of file simple_kinematic_kalman.c.
References FloatVect3::x, FloatVect3::y, and FloatVect3::z.
|
extern |
Get current speed.
| [in] | kalman | SimpleKinematicKalman structure |
Definition at line 123 of file simple_kinematic_kalman.c.
References FloatVect3::x, FloatVect3::y, and FloatVect3::z.
|
extern |
Get current state.
| [in] | kalman | SimpleKinematicKalman structure |
| [out] | pos | current position |
| [out] | speed | current speed |
Definition at line 103 of file simple_kinematic_kalman.c.
References SimpleKinematicKalman::state, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by tag_tracking_propagate(), and update_tag_position().
Here is the caller graph for this function:
|
extern |
Init SimpleKinematicKalman internal struct.
| [in] | kalman | SimpleKinematicKalman structure |
| [in] | P0_pos | initial covariance on position |
| [in] | P0_speed | initial covariance on speed |
| [in] | Q_sigma2 | process noise |
| [in] | r | measurement noise |
| [in] | dt | prediction time step in seconds |
Definition at line 31 of file simple_kinematic_kalman.c.
References SimpleKinematicKalman::dt, SimpleKinematicKalman::F, foo, SimpleKinematicKalman::Hp, SimpleKinematicKalman::Hs, SimpleKinematicKalman::P, SimpleKinematicKalman::Q, SimpleKinematicKalman::r, SIMPLE_KINEMATIC_KALMAN_DIM, and SimpleKinematicKalman::state.
Referenced by tag_tracking_propagate_start_tag().
Here is the caller graph for this function:
|
extern |
Prediction step.
| [in] | kalman | SimpleKinematicKalman structure |
Prediction step.
F = [ 1 dt 0 0 0 0 0 1 0 0 0 0 0 0 1 dt 0 0 0 0 0 1 0 0 0 0 0 0 1 dt 0 0 0 0 0 1 ]
Definition at line 157 of file simple_kinematic_kalman.c.
References SimpleKinematicKalman::dt, foo, SimpleKinematicKalman::P, SimpleKinematicKalman::Q, SIMPLE_KINEMATIC_KALMAN_DIM, and SimpleKinematicKalman::state.
Referenced by tag_tracking_propagate().
Here is the caller graph for this function:
|
extern |
Set initial state vector.
This function should be called after initialization of the kalman struct and before running the filter for better results and faster convergence
| [in] | kalman | SimpleKinematicKalman structure |
| [in] | pos | initial position |
| [in] | speed | initial speed |
Definition at line 92 of file simple_kinematic_kalman.c.
References SimpleKinematicKalman::state, FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by update_tag_position().
Here is the caller graph for this function:
|
extern |
Update process and measurement noises.
| [in] | kalman | SimpleKinematicKalman structure |
| [in] | Q_sigma2 | process noise |
| [in] | r | measurement noise |
Definition at line 132 of file simple_kinematic_kalman.c.
References SimpleKinematicKalman::dt, foo, SimpleKinematicKalman::Q, SimpleKinematicKalman::r, and SIMPLE_KINEMATIC_KALMAN_DIM.
|
extern |
Update step based on each new distance data.
| [in] | kalman | SimpleKinematicKalman structure |
| [in] | pos | position of the target from which the distance is measured |
Update step based on each new distance data.
K = P.Hpt(Hp.P.Hpt+R)^-1 = P.Hpt.S^-1 X = X + K(Z-Hp.X) P = (I-K.Hp)P
Definition at line 249 of file simple_kinematic_kalman.c.
References foo, SimpleKinematicKalman::Hp, MAKE_MATRIX_PTR, simple_kinematic_kalman_update(), FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by update_tag_position().
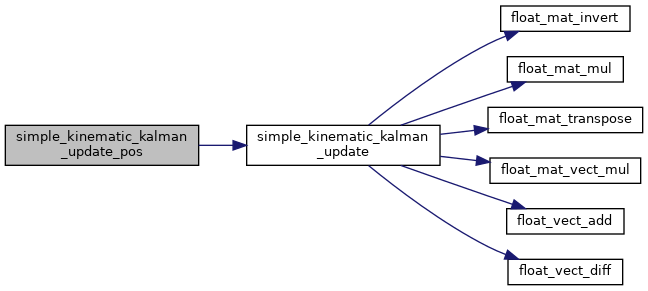
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Update step based on speed measure.
| [in] | kalman | SimpleKinematicKalman structure |
| [in] | speed | new speed measurement |
| [in] | type | 1: horizontal ground speed, 2: vertical ground speed, 3: 3D ground speed |
Update step based on speed measure.
K = P.Hst(Hs.P.Hst+R)^-1 = P.Hst.S^-1 X = X + K(Z-Hs.X) P = (I-K.Hs)P
Definition at line 266 of file simple_kinematic_kalman.c.
References foo, SimpleKinematicKalman::Hs, MAKE_MATRIX_PTR, SIMPLE_KINEMATIC_KALMAN_SPEED_HORIZONTAL, SIMPLE_KINEMATIC_KALMAN_SPEED_VERTICAL, simple_kinematic_kalman_update(), FloatVect3::x, FloatVect3::y, and FloatVect3::z.
Referenced by tag_tracking_propagate().
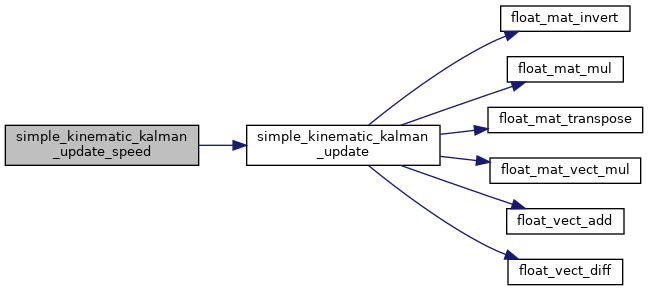
Here is the call graph for this function: Here is the caller graph for this function: