|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
PPM radio control, simulator specific. More...
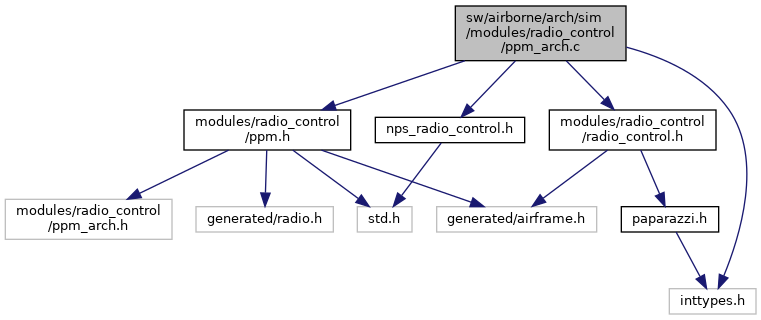
#include "modules/radio_control/radio_control.h"#include "modules/radio_control/ppm.h"#include "nps_radio_control.h"#include <inttypes.h> Include dependency graph for ppm_arch.c:
Include dependency graph for ppm_arch.c:Go to the source code of this file.
Macros | |
| #define | PPM_OF_NPS(_nps, _neutral, _min, _max) ((_nps) >= 0 ? (_neutral) + (_nps) * ((_max)-(_neutral)) : (_neutral) + (_nps) * ((_neutral)- (_min))) |
Functions | |
| void | ppm_arch_init (void) |
| Architecture dependant code. | |
| void | radio_control_feed (void) |
PPM radio control, simulator specific.
Definition in file ppm_arch.c.
| #define PPM_OF_NPS | ( | _nps, | |
| _neutral, | |||
| _min, | |||
| _max | |||
| ) | ((_nps) >= 0 ? (_neutral) + (_nps) * ((_max)-(_neutral)) : (_neutral) + (_nps) * ((_neutral)- (_min))) |
Definition at line 39 of file ppm_arch.c.
Architecture dependant code.
Definition at line 34 of file ppm_arch.c.
Definition at line 42 of file ppm_arch.c.
References foo, NpsRadioControl::mode, nps_radio_control, NpsRadioControl::pitch, ppm_frame_available, PPM_OF_NPS, ppm_pulses, RADIO_MODE, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, RADIO_YAW, NpsRadioControl::roll, NpsRadioControl::throttle, and NpsRadioControl::yaw.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function: