|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
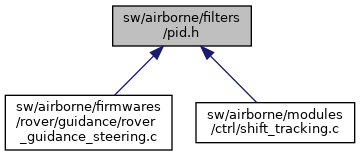
Several forms of PID controllers. More...
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | PID_f |
| Simple PID structure floating point. More... | |
| struct | PID_df |
| Distcrete time PID structure. More... | |
| struct | PI_D_df |
| Distcrete time PI-D structure. More... | |
Functions | |
| static void | init_pid_f (struct PID_f *pid, float Kp, float Kd, float Ki, float max_sum) |
| static float | update_pid_f (struct PID_f *pid, float value, float dt) |
| Update PID with a new value and return new command. | |
| static float | get_pid_f (struct PID_f *pid) |
| Get current value of the PID command. | |
| static void | reset_pid_f (struct PID_f *pid) |
| Reset PID struture, gains left unchanged. | |
| static void | set_gains_pid_f (struct PID_f *pid, float Kp, float Kd, float Ki) |
| Set gains of the PID struct. | |
| static void | set_integral_pid_f (struct PID_f *pid, float value) |
| Set integral part, can be used to reset. | |
| static void | init_pid_df (struct PID_df *pid, float Kp, float Kd, float Ki, float Ts) |
| Init PID struct. | |
| static float | update_pid_df (struct PID_df *pid, float value) |
| Update PID with a new value and return new command. | |
| static float | get_pid_df (struct PID_df *pid) |
| Get current value of the PID command. | |
| static void | reset_pid_df (struct PID_df *pid) |
| Reset PID struture, gains left unchanged. | |
| static void | set_gains_pid_df (struct PID_df *pid, float Kp, float Kd, float Ki, float Ts) |
| Set gains of the PID struct. | |
| static void | init_pi_d_df (struct PI_D_df *pid, float Kp, float Kd, float Ki, float Ts) |
| Init PI-D struct. | |
| static float | update_pi_d_df (struct PI_D_df *pid, float value, float deriv) |
| Update PI-D with a new value and return new command. | |
| static float | get_pi_d_df (struct PI_D_df *pid) |
| Get current value of the PI-D command. | |
| static void | reset_pi_d_df (struct PI_D_df *pid) |
| Reset PI-D struture, gains left unchanged. | |
| static void | set_gains_pi_d_df (struct PI_D_df *pid, float Kp, float Kd, float Ki, float Ts) |
| Set gains PI-D struct. | |
Several forms of PID controllers.
Definition in file pid.h.
| struct PID_f |
Simple PID structure floating point.
u_k = Kp * e_k + Kd * (e_k - e_k-1) / dt + Ki * (sum (e_k * dt))
with: u = outputs e = inputs Kp = proportional gain Kd = derivative gain Ki = integral gain dt = time since last input
| Data Fields | ||
|---|---|---|
| float | e[2] | input |
| float | g[3] | controller gains (Kp, Kd, Ki) |
| float | max_sum | windup protection, max of Ki * sum(e_k * dt) |
| float | sum | integral of input |
| float | u | output |
| struct PID_df |
Distcrete time PID structure.
floating point, fixed frequency.
u_k = u_k-1 + a * e_k + b * e_k-1 + c * e_k-2
with: u = outputs e = inputs a = Kp + Ki Ts/2 + Kd/Ts b = -Kp + Ki Ts/2 - 2 Kd/Ts c = Kd/Ts Kp = proportional gain Kd = derivative gain Ki = integral gain Ts = sampling frequency
| Data Fields | ||
|---|---|---|
| float | e[3] | input |
| float | g[3] | controller gains |
| float | u[2] | output |
| struct PI_D_df |
Distcrete time PI-D structure.
derivative term is directly provided as input as it may be available directly from a sensor or estimated separately. floating point, fixed frequency.
u_k = u_k-1 + a * e_k + b * e_k-1 + Kd * d_k
with: u = outputs e = inputs d = derivative of input a = Kp + Ki Ts/2 b = -Kp + Ki Ts/2 Kp = proportional gain Kd = derivative gain Ki = integral gain Ts = sampling frequency
| Data Fields | ||
|---|---|---|
| float | e[2] | input |
| float | g[3] | controller gains |
| float | u[2] | output |
Get current value of the PI-D command.
| pid | pointer to PI-D structure |
Definition at line 305 of file pid.h.
References PI_D_df::u.
Get current value of the PID command.
| pid | pointer to PID structure |
Definition at line 89 of file pid.h.
References PID_f::u.
Referenced by rover_guidance_steering_speed_ctrl().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 50 of file pid.h.
References foo, and PID_f::max_sum.
Referenced by rover_guidance_steering_init(), and shift_tracking_init().
Here is the caller graph for this function:Reset PI-D struture, gains left unchanged.
| pid | pointer to PI-D structure |
Definition at line 314 of file pid.h.
References PI_D_df::e, and PI_D_df::u.
Reset PID struture, gains left unchanged.
| pid | pointer to PID structure |
Definition at line 98 of file pid.h.
References PID_f::e, PID_f::sum, and PID_f::u.
Referenced by rover_guidance_steering_pid_reset(), and shift_tracking_reset().
Here is the caller graph for this function:
|
inlinestatic |
Set gains PI-D struct.
| pid | pointer to PID structure |
| Kp | proportional gain |
| Kd | derivative gain |
| Ki | integral gain |
| Ts | sampling time |
Definition at line 330 of file pid.h.
References foo, and PI_D_df::g.
Set gains of the PID struct.
| pid | pointer to PID structure |
| Kp | proportional gain |
| Kd | derivative gain |
| Ki | integral gain |
Definition at line 113 of file pid.h.
Referenced by rover_guidance_steering_set_speed_igain(), rover_guidance_steering_set_speed_pgain(), and shift_tracking_update_gains().
Here is the caller graph for this function:Set integral part, can be used to reset.
The new sum of errors is calculated from current gains and bounds.
| pid | pointer to PID structure |
| value | integral part of the PID control, 0. will reset it |
Definition at line 126 of file pid.h.
References foo, PID_f::g, PID_f::max_sum, and PID_f::sum.
Update PI-D with a new value and return new command.
| pid | pointer to PI-D structure |
| value | new input value of the PI-D |
| deriv | new input derivative |
Definition at line 291 of file pid.h.
References PI_D_df::e, foo, PI_D_df::g, and PI_D_df::u.
Update PID with a new value and return new command.
| pid | pointer to PID structure |
| value | new input value of the PID |
| dt | time since last input (in seconds) |
Definition at line 68 of file pid.h.
References PID_f::e, foo, PID_f::g, PID_f::max_sum, PID_f::sum, and PID_f::u.
Referenced by rover_guidance_steering_speed_ctrl(), and shift_tracking_run().
Here is the caller graph for this function: