|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Autopilot main loop. More...
 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | main_ap_init (void) |
| void | main_ap_periodic (void) |
| void | main_ap_event (void) |
Autopilot main loop.
This process is reponsible for the collecting the different sensors data, calling the appropriate estimation algorithms and running the different control loops.
Definition in file main_ap.h.
Definition at line 146 of file main_ap.c.
References foo.
Referenced by nps_autopilot_run_step().
Here is the caller graph for this function:Definition at line 79 of file main_ap.c.
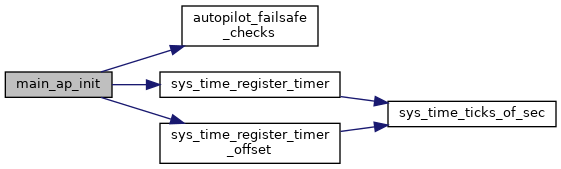
References autopilot_failsafe_checks(), DATALINK_PERIOD, foo, modules_datalink_tid, modules_gnc_tid, modules_mcu_core_tid, modules_radio_control_tid, modules_sensors_tid, SENSORS_PERIOD, SYS_PERIOD, sys_time_register_timer(), and sys_time_register_timer_offset().
Referenced by nps_autopilot_init(), and nps_autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 119 of file main_ap.c.
References foo, modules_datalink_tid, modules_gnc_tid, modules_mcu_core_tid, modules_radio_control_tid, modules_sensors_tid, and sys_time_check_and_ack_timer().
Referenced by nps_autopilot_run_step().
Here is the call graph for this function: Here is the caller graph for this function: