Paparazzi UAS
v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
Loading...
Searching...
No Matches
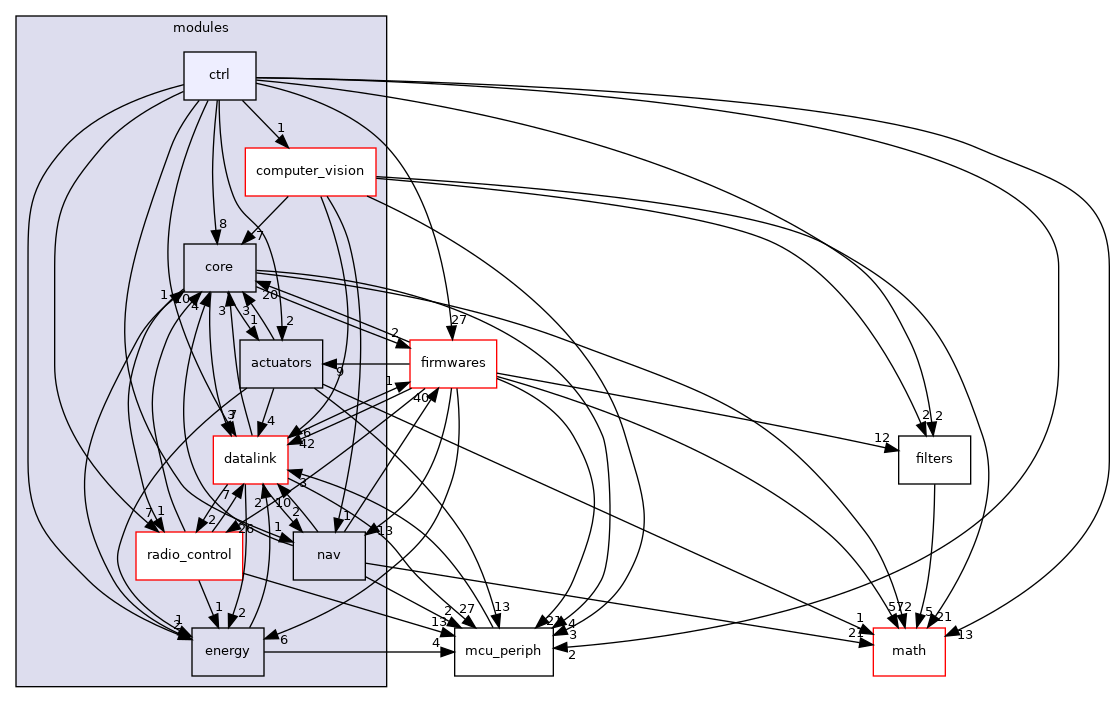
ctrl Directory Reference
Directory dependency graph for ctrl:
Files
approach_moving_target.c
approach_moving_target.h
control_mixing_heewing.c
control_mixing_heewing.h
ctrl_module_innerloop_demo.c
example empty controller
ctrl_module_innerloop_demo.h
example empty controller
ctrl_module_outerloop_demo.c
example empty controller
ctrl_module_outerloop_demo.h
example empty controller
ctrl_windtunnel.c
Windtunnel automatic step controller.
ctrl_windtunnel.h
Windtunnel controller.
eff_scheduling_cyfoam.c
eff_scheduling_cyfoam.h
eff_scheduling_falcon.c
Interpolation of control effectivenss matrix of the Falcon hybrid plane.
eff_scheduling_falcon.h
Interpolation of control effectivenss matrix of the Falcon hybrid plane.
eff_scheduling_generic.c
Module that interpolates gainsets in flight based on the transition percentage.
eff_scheduling_generic.h
eff_scheduling_nederdrone.c
eff_scheduling_nederdrone.h
eff_scheduling_rotwing.c
eff_scheduling_rotwing.h
eff_scheduling_rotwing_V2.c
eff_scheduling_rotwing_V2.h
follow_me.c
follow_me.h
gain_scheduling.c
Module that interpolates gainsets in flight based on a scheduling variable.
gain_scheduling.h
Module that interpolates between gain sets, depending on the scheduling variable.
object_tracking.c
object_tracking.h
optical_flow_functions.c
optical_flow_functions.h
optical_flow_hover.c
optical_flow_hover.h
optical_flow_landing.c
This module implements optical flow landings in which the divergence is kept constant.
optical_flow_landing.h
This module implements optical flow landings in which the divergence is kept constant.
scheduling_indi_simple.c
scheduling_indi_simple.h
shift_tracking.c
shift_tracking.h
target_pos.c
target_pos.h
vertical_ctrl_module_demo.c
example vertical controller
vertical_ctrl_module_demo.h
example vertical
sw
airborne
modules
ctrl
Generated on Mon Dec 8 2025 10:25:32 for Paparazzi UAS by
1.9.8
 Directory dependency graph for ctrl:
Directory dependency graph for ctrl: