|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
INS based in the EKF2 of PX4. More...
#include "modules/ins/ins_ekf2.h"#include "modules/nav/waypoints.h"#include "modules/core/abi.h"#include "stabilization/stabilization_attitude.h"#include "generated/airframe.h"#include "generated/flight_plan.h"#include "EKF/ekf.h"#include "math/pprz_isa.h"#include "math/pprz_geodetic_wgs84.h"#include "mcu_periph/sys_time.h"#include "autopilot.h"#include "modules/datalink/telemetry.h" Include dependency graph for ins_ekf2.cpp:
Include dependency graph for ins_ekf2.cpp:Go to the source code of this file.
Variables | |
| static abi_event | baro_ev |
| static abi_event | temperature_ev |
| static abi_event | agl_ev |
| static abi_event | gyro_int_ev |
| static abi_event | accel_int_ev |
| static abi_event | mag_ev |
| static abi_event | gps_ev |
| static abi_event | relpos_ev |
| static abi_event | optical_flow_ev |
| static abi_event | reset_ev |
| static Ekf | ekf |
| EKF class itself. | |
| static parameters * | ekf_params |
| The EKF parameters. | |
| struct ekf2_t | ekf2 |
| Local EKF2 status structure. | |
| static struct extVisionSample | sample_ev |
| External vision sample. | |
INS based in the EKF2 of PX4.
Definition in file ins_ekf2.cpp.
| #define INS_EKF2_ACCEL_ID ABI_BROADCAST |
Definition at line 142 of file ins_ekf2.cpp.
| #define INS_EKF2_AGL_ID ABI_BROADCAST |
default AGL sensor to use in INS
Definition at line 130 of file ins_ekf2.cpp.
| #define INS_EKF2_BARO_ID ABI_BROADCAST |
default barometer to use in INS
Definition at line 117 of file ins_ekf2.cpp.
Definition at line 292 of file ins_ekf2.cpp.
Definition at line 274 of file ins_ekf2.cpp.
Definition at line 262 of file ins_ekf2.cpp.
Definition at line 268 of file ins_ekf2.cpp.
| #define INS_EKF2_FLOW_INNOV_GATE 4 |
Definition at line 256 of file ins_ekf2.cpp.
| #define INS_EKF2_FLOW_NOISE 0.03 |
Definition at line 244 of file ins_ekf2.cpp.
| #define INS_EKF2_FLOW_NOISE_QMIN 0.05 |
Definition at line 250 of file ins_ekf2.cpp.
| #define INS_EKF2_FLOW_POS_X 0 |
Definition at line 226 of file ins_ekf2.cpp.
| #define INS_EKF2_FLOW_POS_Y 0 |
Definition at line 232 of file ins_ekf2.cpp.
| #define INS_EKF2_FLOW_POS_Z 0 |
Definition at line 238 of file ins_ekf2.cpp.
| #define INS_EKF2_FLOW_SENSOR_DELAY 15 |
Definition at line 208 of file ins_ekf2.cpp.
| #define INS_EKF2_FUSION_MODE (MASK_USE_GPS) |
Special configuration for Optitrack.
The EKF2 fusion mode setting
Definition at line 72 of file ins_ekf2.cpp.
| #define INS_EKF2_GPS_CHECK_MASK 21 |
The EKF2 GPS checks before initialization.
Definition at line 90 of file ins_ekf2.cpp.
| #define INS_EKF2_GPS_ID GPS_MULTI_ID |
Definition at line 154 of file ins_ekf2.cpp.
Definition at line 286 of file ins_ekf2.cpp.
| #define INS_EKF2_GPS_POS_X 0 |
Definition at line 190 of file ins_ekf2.cpp.
| #define INS_EKF2_GPS_POS_Y 0 |
Definition at line 196 of file ins_ekf2.cpp.
| #define INS_EKF2_GPS_POS_Z 0 |
Definition at line 202 of file ins_ekf2.cpp.
Definition at line 280 of file ins_ekf2.cpp.
| #define INS_EKF2_GYRO_ID ABI_BROADCAST |
Definition at line 136 of file ins_ekf2.cpp.
| #define INS_EKF2_IMU_POS_X 0 |
Definition at line 172 of file ins_ekf2.cpp.
| #define INS_EKF2_IMU_POS_Y 0 |
Definition at line 178 of file ins_ekf2.cpp.
| #define INS_EKF2_IMU_POS_Z 0 |
Definition at line 184 of file ins_ekf2.cpp.
| #define INS_EKF2_MAG_FUSION_TYPE MAG_FUSE_TYPE_AUTO |
The EKF2 magnetometer fusion type.
Definition at line 78 of file ins_ekf2.cpp.
| #define INS_EKF2_MAG_ID ABI_BROADCAST |
Definition at line 148 of file ins_ekf2.cpp.
| #define INS_EKF2_MAX_FLOW_RATE 200 |
Definition at line 220 of file ins_ekf2.cpp.
| #define INS_EKF2_MAX_REL_LENGTH_ERROR 0.2 |
Maximum allowed error in distance between dual GPS antennae.
Definition at line 54 of file ins_ekf2.cpp.
| #define INS_EKF2_MIN_FLOW_QUALITY 100 |
Definition at line 214 of file ins_ekf2.cpp.
| #define INS_EKF2_OF_ID ABI_BROADCAST |
Definition at line 166 of file ins_ekf2.cpp.
| #define INS_EKF2_RANGE_MAIN_AGL 1 |
If enabled uses radar sensor as primary AGL source, if possible.
Definition at line 108 of file ins_ekf2.cpp.
| #define INS_EKF2_RELHEADING_ERR 0.2 |
Definition at line 298 of file ins_ekf2.cpp.
| #define INS_EKF2_RELPOS_ID ABI_BROADCAST |
Definition at line 160 of file ins_ekf2.cpp.
| #define INS_EKF2_SONAR_MAX_RANGE 4 |
Default AGL sensor maximum range.
Definition at line 102 of file ins_ekf2.cpp.
| #define INS_EKF2_SONAR_MIN_RANGE 0.001 |
Default AGL sensor minimum range.
Definition at line 96 of file ins_ekf2.cpp.
| #define INS_EKF2_TEMPERATURE_ID ABI_BROADCAST |
default temperature sensor to use in INS
Definition at line 124 of file ins_ekf2.cpp.
| #define INS_EKF2_VDIST_SENSOR_TYPE VDIST_SENSOR_BARO |
The EKF2 primary vertical distance sensor type.
Definition at line 84 of file ins_ekf2.cpp.
For SITL and NPS we need special includes.
INS reference from flight plan, true by default
Definition at line 49 of file ins_ekf2.cpp.
|
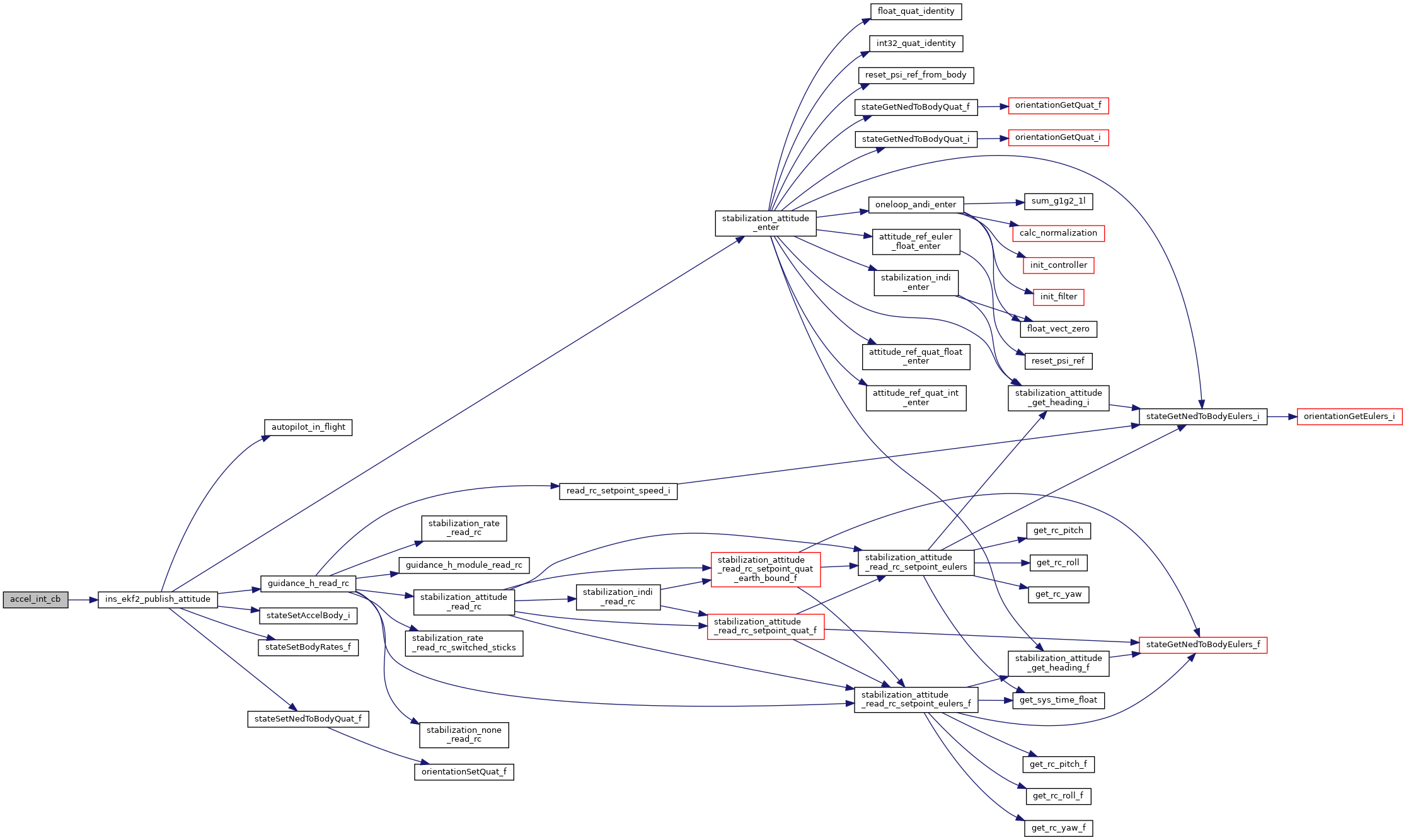
static |
Definition at line 953 of file ins_ekf2.cpp.
References ekf2_t::accel_dt, ekf2_t::accel_valid, ekf2_t::delta_accel, ekf2, foo, ekf2_t::gyro_valid, ins_ekf2_publish_attitude(), and VECT3_COPY.
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 927 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
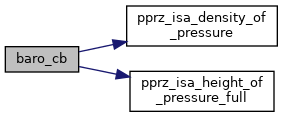
Here is the caller graph for this function:Definition at line 906 of file ins_ekf2.cpp.
References ekf, ekf2, foo, pprz_isa_density_of_pressure(), pprz_isa_height_of_pressure_full(), ekf2_t::qnh, and ekf2_t::temp.
Referenced by ins_ekf2_init().
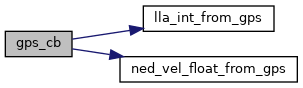
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 992 of file ins_ekf2.cpp.
References ekf, ekf2, foo, GPS_VALID_VEL_NED_BIT, LlaCoor_i::lat, lla_int_from_gps(), LlaCoor_i::lon, ned_vel_float_from_gps(), ekf2_t::rel_heading, ekf2_t::rel_heading_valid, NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
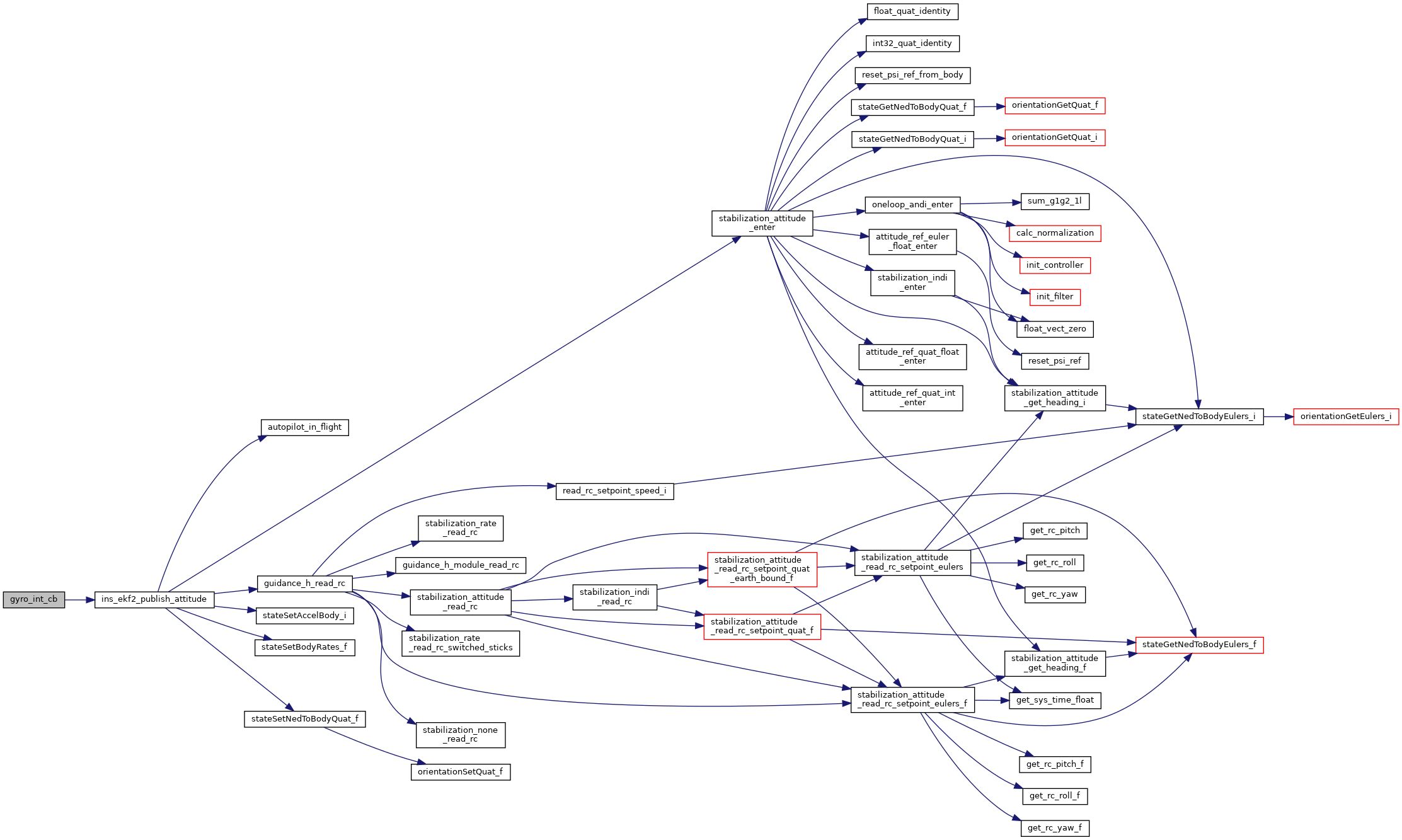
static |
Definition at line 938 of file ins_ekf2.cpp.
References ekf2_t::accel_valid, ekf2_t::delta_gyro, ekf2, foo, ekf2_t::gyro_dt, ekf2_t::gyro_valid, ins_ekf2_publish_attitude(), and RATES_COPY.
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 549 of file ins_ekf2.cpp.
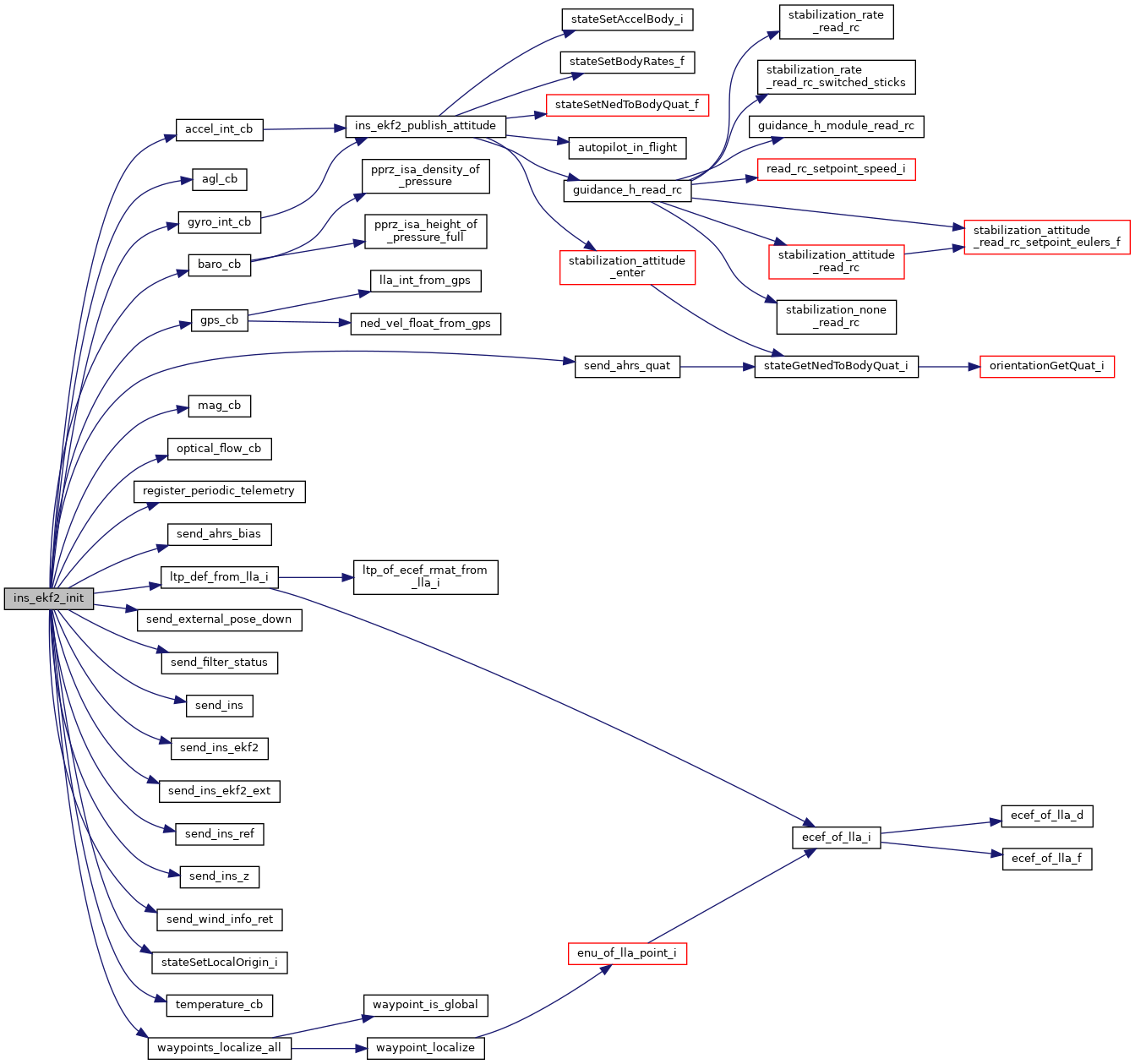
References ABI_BROADCAST, accel_int_cb(), accel_int_ev, ekf2_t::accel_valid, agl_cb(), agl_ev, baro_cb(), baro_ev, DefaultPeriodic, ekf, ekf2, ekf_params, ekf2_t::flow_stamp, foo, ekf2_t::got_imu_data, gps_cb(), gps_ev, gyro_int_cb(), gyro_int_ev, ekf2_t::gyro_valid, LtpDef_i::hmsl, INS_EKF2_ACCEL_ID, INS_EKF2_AGL_ID, INS_EKF2_BARO_ID, INS_EKF2_BARO_NOISE, INS_EKF2_FLOW_INNOV_GATE, INS_EKF2_FLOW_NOISE, INS_EKF2_FLOW_NOISE_QMIN, INS_EKF2_FLOW_POS_X, INS_EKF2_FLOW_POS_Y, INS_EKF2_FLOW_POS_Z, INS_EKF2_FLOW_SENSOR_DELAY, INS_EKF2_FUSION_MODE, INS_EKF2_GPS_CHECK_MASK, INS_EKF2_GPS_ID, INS_EKF2_GPS_P_NOISE, INS_EKF2_GPS_POS_X, INS_EKF2_GPS_POS_Y, INS_EKF2_GPS_POS_Z, INS_EKF2_GPS_V_NOISE, INS_EKF2_GYRO_ID, INS_EKF2_IMU_POS_X, INS_EKF2_IMU_POS_Y, INS_EKF2_IMU_POS_Z, INS_EKF2_MAG_FUSION_TYPE, INS_EKF2_MAG_ID, INS_EKF2_MAX_FLOW_RATE, INS_EKF2_MIN_FLOW_QUALITY, INS_EKF2_OF_ID, INS_EKF2_RANGE_MAIN_AGL, INS_EKF2_RELPOS_ID, INS_EKF2_SONAR_MAX_RANGE, INS_EKF2_SONAR_MIN_RANGE, INS_EKF2_TEMPERATURE_ID, INS_EKF2_VDIST_SENSOR_TYPE, LlaCoor_i::lat, ekf2_t::ltp_def, ltp_def_from_lla_i(), ekf2_t::ltp_stamp, mag_cb(), mag_ev, optical_flow_cb(), optical_flow_ev, ekf2_t::qnh, ekf2_t::quat_reset_counter, register_periodic_telemetry(), relpos_cb(), relpos_ev, reset_cb(), reset_ev, sample_ev, send_ahrs_bias(), send_ahrs_quat(), send_external_pose_down(), send_filter_status(), send_ins(), send_ins_ekf2(), send_ins_ekf2_ext(), send_ins_ref(), send_ins_z(), send_wind_info_ret(), stateSetLocalOrigin_i(), ekf2_t::temp, temperature_cb(), temperature_ev, and waypoints_localize_all().
Here is the call graph for this function:Definition at line 798 of file ins_ekf2.cpp.
References ekf, float_quat_comp(), foo, get_sys_time_usec(), INS_EKF2_EVA_NOISE, INS_EKF2_EVP_NOISE, INS_EKF2_EVV_NOISE, and sample_ev.
Here is the call graph for this function:Definition at line 832 of file ins_ekf2.cpp.
Publish the attitude and get the new state Directly called after a succeslfull gyro+accel reading.
Definition at line 839 of file ins_ekf2.cpp.
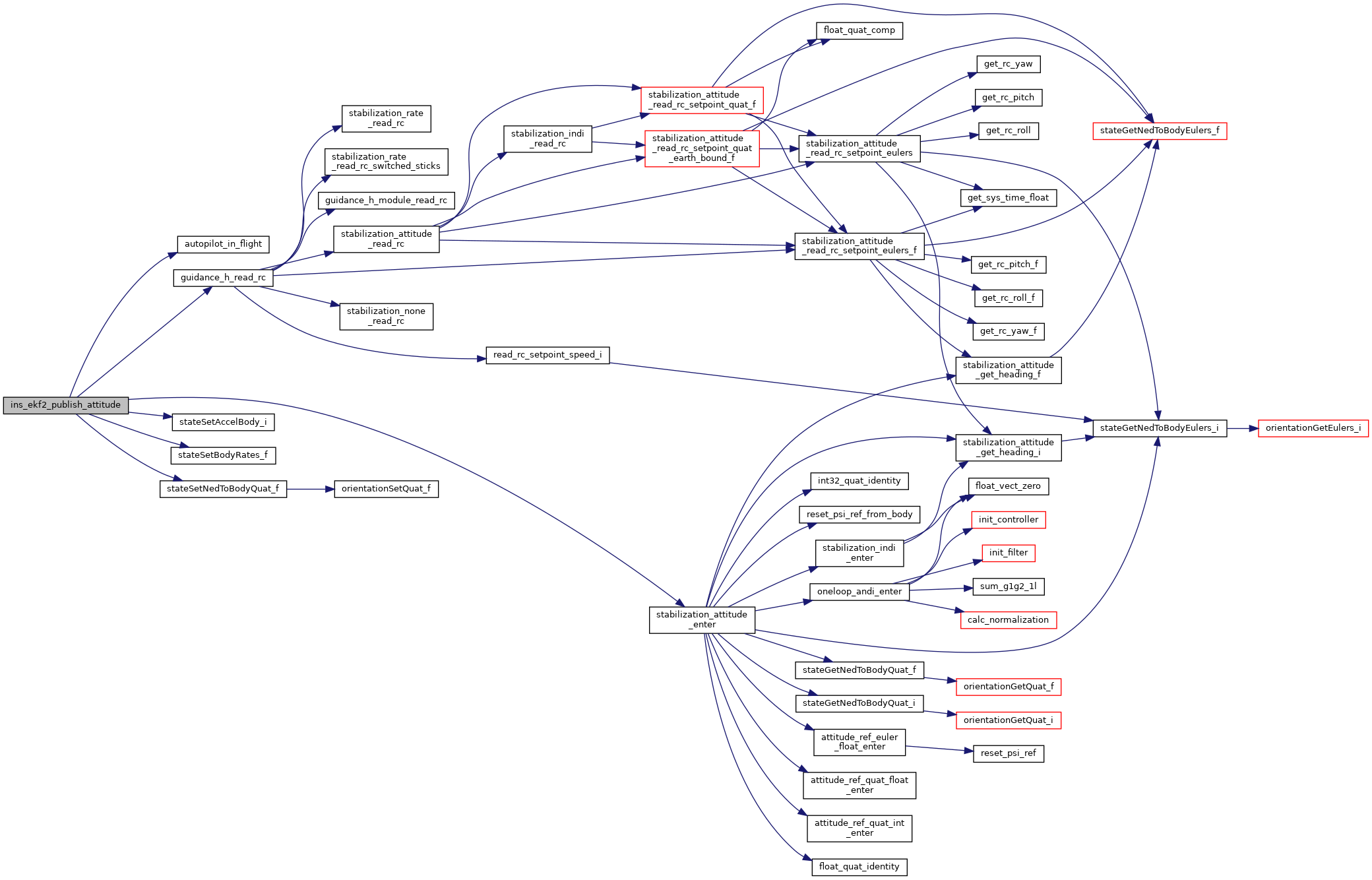
References ACCEL_BFP_OF_REAL, ekf2_t::accel_dt, ekf2_t::accel_valid, ekf2_t::delta_accel, ekf2_t::delta_gyro, ekf, ekf2, foo, ekf2_t::got_imu_data, guidance_h, ekf2_t::gyro_dt, ekf2_t::gyro_valid, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceRCInput::heading, RotorcraftNavigation::heading, nav, FloatRates::p, FloatRates::q, FloatQuat::qi, ekf2_t::quat_reset_counter, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatRates::r, HorizontalGuidance::rc_sp, HorizontalGuidance::sp, stabilization_attitude_enter(), stateSetAccelBody_i(), stateSetBodyRates_f(), stateSetNedToBodyQuat_f(), FloatVect3::x, Int32Vect3::x, FloatVect3::y, Int32Vect3::y, FloatVect3::z, and Int32Vect3::z.
Referenced by accel_int_cb(), and gyro_int_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 789 of file ins_ekf2.cpp.
References ekf2, ekf_params, foo, ekf2_t::fusion_mode, INS_EKF2_FUSION_MODE, and mode.
Definition at line 712 of file ins_ekf2.cpp.
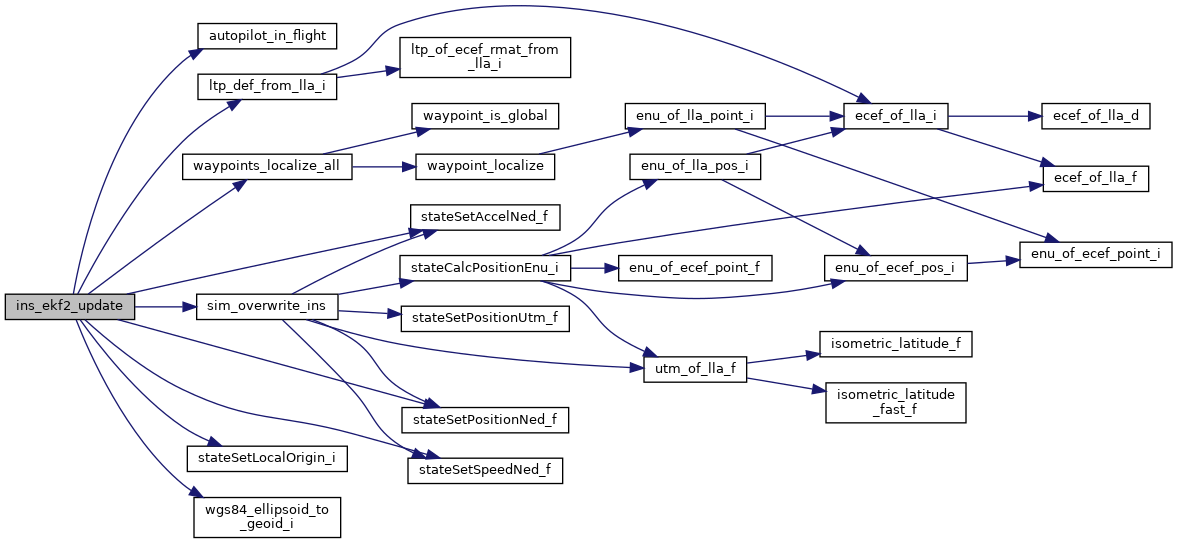
References autopilot_in_flight(), ekf, ekf2, foo, ekf2_t::got_imu_data, LtpDef_i::hmsl, LlaCoor_i::lat, ekf2_t::ltp_def, ltp_def_from_lla_i(), ekf2_t::ltp_stamp, nps_bypass_ins, sim_overwrite_ins(), stateSetAccelNed_f(), stateSetLocalOrigin_i(), stateSetPositionNed_f(), stateSetSpeedNed_f(), waypoints_localize_all(), wgs84_ellipsoid_to_geoid_i(), NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Here is the call graph for this function:
|
static |
Definition at line 968 of file ins_ekf2.cpp.
References ekf, ekf2, foo, ekf2_t::got_imu_data, and MAGS_FLOAT_OF_BFP.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 1056 of file ins_ekf2.cpp.
References ekf, ekf2, ekf2_t::flow_stamp, and foo.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:Definition at line 1036 of file ins_ekf2.cpp.
References ekf2, foo, INS_EKF2_RELHEADING_ERR, ekf2_t::rel_heading, and ekf2_t::rel_heading_valid.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:Definition at line 697 of file ins_ekf2.cpp.
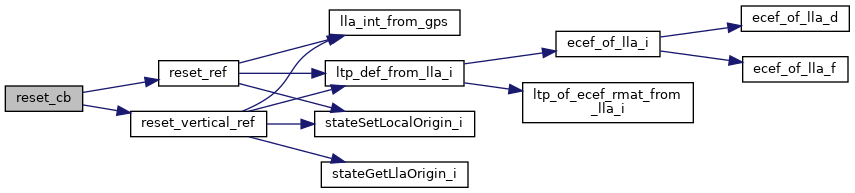
References foo, INS_RESET_REF, INS_RESET_VERTICAL_REF, reset_ref(), and reset_vertical_ref().
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 664 of file ins_ekf2.cpp.
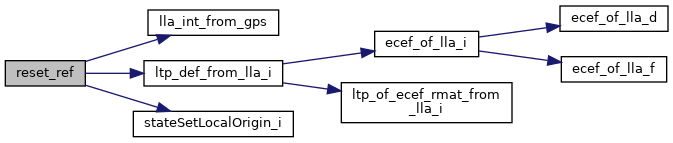
References ekf, ekf2, foo, gps, GpsFixValid, LtpDef_i::hmsl, GpsState::hmsl, LlaCoor_i::lat, lla_int_from_gps(), LlaCoor_i::lon, ekf2_t::ltp_def, ltp_def_from_lla_i(), and stateSetLocalOrigin_i().
Referenced by reset_cb().
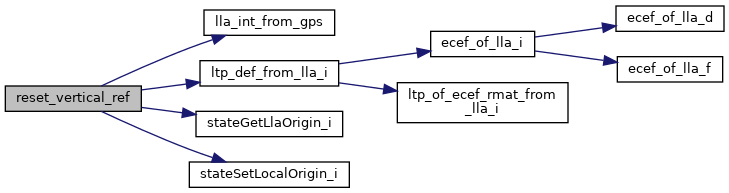
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 678 of file ins_ekf2.cpp.
References LlaCoor_i::alt, ekf, ekf2, foo, gps, GpsFixValid, LtpDef_i::hmsl, GpsState::hmsl, LlaCoor_i::lat, lla_int_from_gps(), LlaCoor_i::lon, ekf2_t::ltp_def, ltp_def_from_lla_i(), stateGetLlaOrigin_i(), and stateSetLocalOrigin_i().
Referenced by reset_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 481 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 491 of file ins_ekf2.cpp.
References dev, ekf, foo, Int32Quat::qi, QUAT1_BFP_OF_REAL, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, and stateGetNedToBodyQuat_i().
Referenced by ins_ekf2_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 516 of file ins_ekf2.cpp.
References dev, foo, and sample_ev.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 444 of file ins_ekf2.cpp.
References AHRS_COMP_ID_EKF2, dev, ekf, and foo.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 340 of file ins_ekf2.cpp.
References ACCEL_BFP_OF_REAL, dev, ekf, foo, POS_BFP_OF_REAL, SPEED_BFP_OF_REAL, NedCoor_i::x, NedCoor_i::y, and NedCoor_i::z.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 397 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 430 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 387 of file ins_ekf2.cpp.
References LlaCoor_i::alt, dev, LtpDef_i::ecef, ekf2, foo, LtpDef_i::hmsl, LlaCoor_i::lat, LtpDef_i::lla, LlaCoor_i::lon, ekf2_t::ltp_def, ekf2_t::ltp_stamp, EcefCoor_i::x, EcefCoor_i::y, and EcefCoor_i::z.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 367 of file ins_ekf2.cpp.
References ACCEL_BFP_OF_REAL, dev, ekf, foo, POS_BFP_OF_REAL, pos_z, and SPEED_BFP_OF_REAL.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 469 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:Definition at line 921 of file ins_ekf2.cpp.
References ekf2, and ekf2_t::temp.
Referenced by ins_ekf2_init().
Here is the caller graph for this function:
|
static |
Definition at line 310 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 308 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 306 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
EKF class itself.
Definition at line 333 of file ins_ekf2.cpp.
Referenced by agl_cb(), baro_cb(), gps_cb(), ins_ekf2_init(), ins_ekf2_parse_EXTERNAL_POSE(), ins_ekf2_publish_attitude(), ins_ekf2_update(), mag_cb(), optical_flow_cb(), reset_ref(), reset_vertical_ref(), send_ahrs_bias(), send_ahrs_quat(), send_filter_status(), send_ins(), send_ins_ekf2(), send_ins_ekf2_ext(), send_ins_z(), and send_wind_info_ret().
| struct ekf2_t ekf2 |
Local EKF2 status structure.
Definition at line 335 of file ins_ekf2.cpp.
Referenced by accel_int_cb(), baro_cb(), gps_cb(), gyro_int_cb(), ins_ekf2_init(), ins_ekf2_publish_attitude(), ins_ekf2_remove_gps(), ins_ekf2_update(), mag_cb(), optical_flow_cb(), relpos_cb(), reset_ref(), reset_vertical_ref(), send_ins_ref(), and temperature_cb().
|
static |
The EKF parameters.
Definition at line 334 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init(), and ins_ekf2_remove_gps().
|
static |
Definition at line 312 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 309 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 311 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 314 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 313 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
Definition at line 315 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().
|
static |
External vision sample.
Definition at line 336 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init(), ins_ekf2_parse_EXTERNAL_POSE(), and send_external_pose_down().
|
static |
Definition at line 307 of file ins_ekf2.cpp.
Referenced by ins_ekf2_init().