|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Fly By Wire: More...
#include "std.h" Include dependency graph for main_fbw.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for main_fbw.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | RC_LOST_FBW_MODE FBW_MODE_AUTO |
| mode to enter when RC is lost while using a mode with RC input switching to AUTO allows a recover with HOME mode | |
| #define | RC_LOST_IN_AUTO_FBW_MODE FBW_MODE_AUTO |
| mode to enter when AP is lost while using autopilot | |
| #define | AP_LOST_FBW_MODE FBW_MODE_FAILSAFE |
| mode to enter when AP is lost while using autopilot | |
| #define | FBW_MODE_AUTO_ONLY false |
| holds whether the aircraft can only be flown with the AP and not RC-Direct/FBW-mode | |
| #define | RADIO_FBW_MODE RADIO_MODE |
| Switching between FBW and autopilot is done with RADIO_FBW_MODE: default is to re-use RADIO_MODE. | |
| #define | FBW_MODE_MANUAL 0 |
| #define | FBW_MODE_AUTO 1 |
| #define | FBW_MODE_FAILSAFE 2 |
Functions | |
| void | main_fbw_init (void) |
| Main initialization. | |
| void | main_fbw_event (void) |
| void | main_fbw_periodic (void) |
| void | main_fbw_parse_EMERGENCY_CMD (uint8_t *buf) |
Variables | |
| uint8_t | fbw_mode |
| Fly by wire modes. | |
| bool | fbw_motors_on |
Fly By Wire:
Reads radio_control Reads intermcu Sets actuators Run datalink/telemetry
if no rc but autopilot then RC_LOST_FBW_MODE (define below) if no rc while in auto mode then RC_LOST_IN_AUTO_FBW_MODE (define below) if no ap but rc then AP_LOST_FBW_MODE (define below)
Definition in file main_fbw.h.
| #define AP_LOST_FBW_MODE FBW_MODE_FAILSAFE |
mode to enter when AP is lost while using autopilot
Definition at line 55 of file main_fbw.h.
| #define FBW_MODE_AUTO 1 |
Definition at line 69 of file main_fbw.h.
holds whether the aircraft can only be flown with the AP and not RC-Direct/FBW-mode
Definition at line 60 of file main_fbw.h.
| #define FBW_MODE_FAILSAFE 2 |
Definition at line 70 of file main_fbw.h.
| #define FBW_MODE_MANUAL 0 |
Definition at line 68 of file main_fbw.h.
| #define RADIO_FBW_MODE RADIO_MODE |
Switching between FBW and autopilot is done with RADIO_FBW_MODE: default is to re-use RADIO_MODE.
Definition at line 65 of file main_fbw.h.
| #define RC_LOST_FBW_MODE FBW_MODE_AUTO |
mode to enter when RC is lost while using a mode with RC input switching to AUTO allows a recover with HOME mode
Definition at line 45 of file main_fbw.h.
| #define RC_LOST_IN_AUTO_FBW_MODE FBW_MODE_AUTO |
mode to enter when AP is lost while using autopilot
Definition at line 50 of file main_fbw.h.
Definition at line 263 of file main_fbw.c.
References foo, and intermcu_event().
Here is the call graph for this function:Main initialization.
Definition at line 78 of file main_fbw.c.
References electrical_tid, fbw_mode, FBW_MODE_FAILSAFE, foo, MAIN_FBW_RC_ID, periodic_tid, radio_control_tid, rc_cb(), rc_ev, sys_time_register_timer(), and telemetry_tid.
Here is the call graph for this function:Definition at line 256 of file main_fbw.c.
References fbw_mode, FBW_MODE_FAILSAFE, and foo.
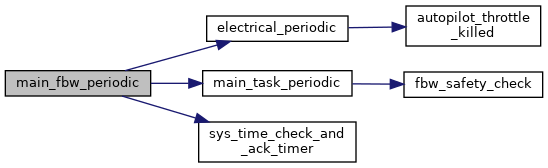
Definition at line 187 of file main_fbw.c.
References electrical_periodic(), electrical_tid, foo, main_task_periodic(), periodic_tid, radio_control_tid, sys_time_check_and_ack_timer(), and telemetry_tid.
Here is the call graph for this function:
|
extern |
Fly by wire modes.
Definition at line 41 of file main_fbw.c.
Referenced by fbw_safety_check(), intermcu_send_status(), main_fbw_init(), main_fbw_parse_EMERGENCY_CMD(), main_task_periodic(), rc_cb(), rc_cb(), and send_fbw_status().
|
extern |
Definition at line 42 of file main_fbw.c.
Referenced by main_task_periodic(), and rc_cb().