|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Core autopilot interface common to all firmwares. More...
#include "autopilot.h"#include "generated/modules.h"#include "mcu_periph/uart.h"#include "mcu_periph/sys_time.h"#include "mcu_periph/gpio.h"#include "modules/core/commands.h"#include "modules/datalink/telemetry.h"#include "modules/core/abi.h"#include "modules/checks/preflight_checks.h"#include "modules/core/settings.h"#include "generated/settings.h"#include "pprz_version.h" Include dependency graph for autopilot.c:
Include dependency graph for autopilot.c:Go to the source code of this file.
Macros | |
| #define | AUTOPILOT_RC_ID ABI_BROADCAST |
Functions | |
| static void | rc_cb (uint8_t sender_id, struct RadioControl *rc) |
| static void | send_autopilot_version (struct transport_tx *trans, struct link_device *dev) |
| static void | send_alive (struct transport_tx *trans, struct link_device *dev) |
| static void | send_attitude (struct transport_tx *trans, struct link_device *dev) |
| static void | send_dl_value (struct transport_tx *trans, struct link_device *dev) |
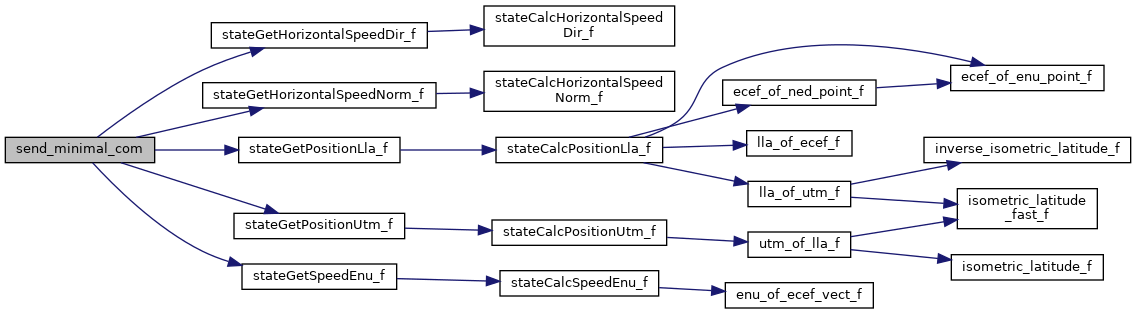
| static void | send_minimal_com (struct transport_tx *trans, struct link_device *dev) |
| void | autopilot_init (void) |
| Autopilot initialization function. | |
| void | autopilot_periodic (void) |
| AP periodic call. | |
| void WEAK | autopilot_event (void) |
| AP event call. | |
| void | autopilot_on_rc_frame (void) |
| RC frame handler. | |
| void WEAK | autopilot_failsafe_checks (void) |
| Failsafe checks. | |
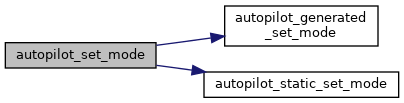
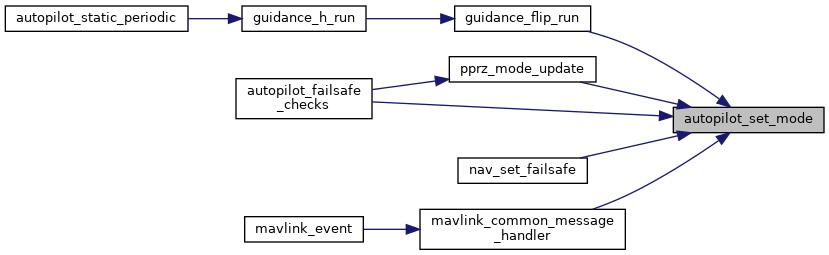
| bool | autopilot_set_mode (uint8_t new_autopilot_mode) |
| set autopilot mode | |
| void | autopilot_SetModeHandler (float mode) |
| AP mode setting handler. | |
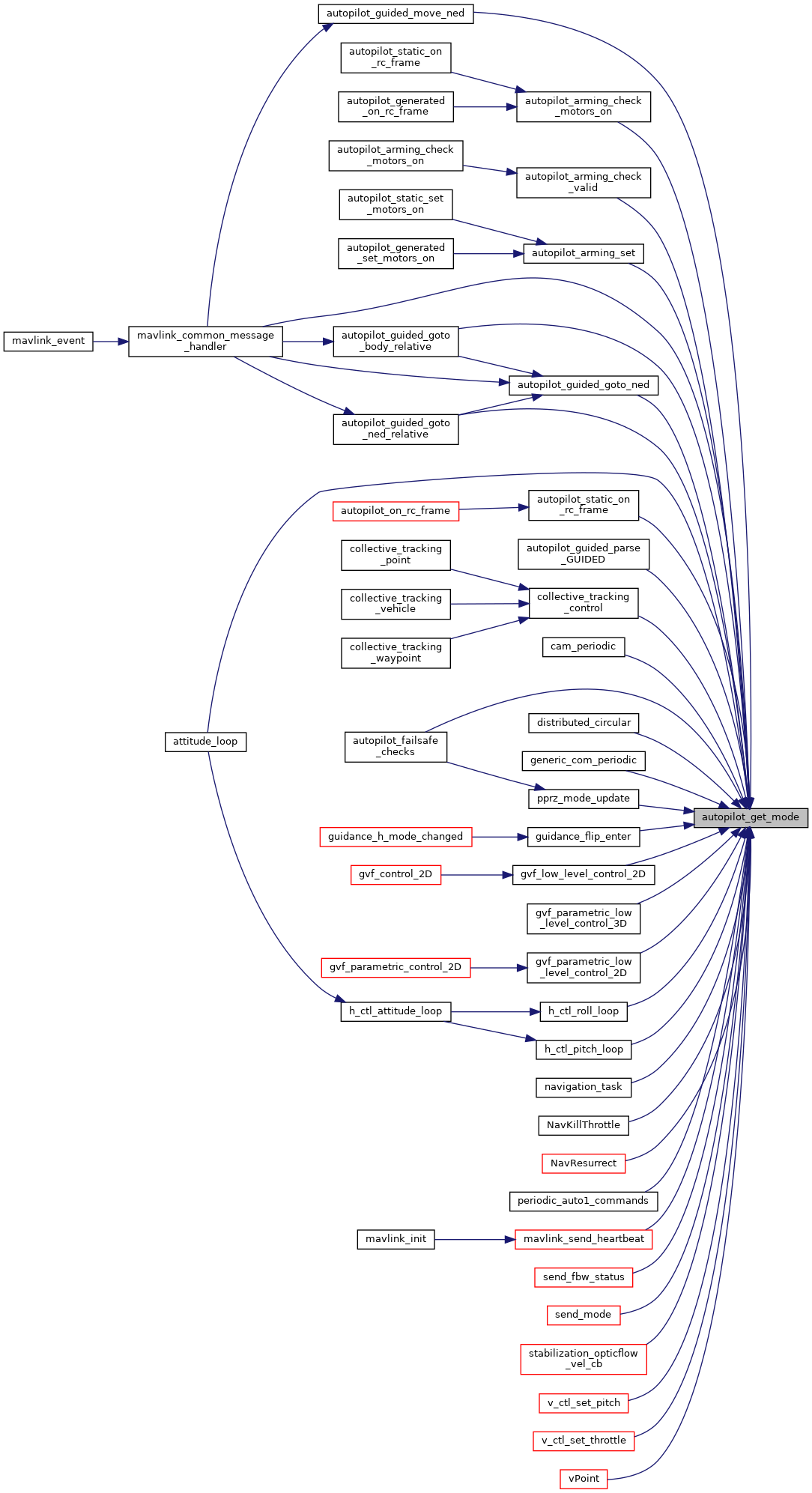
| uint8_t | autopilot_get_mode (void) |
| get autopilot mode | |
| void | autopilot_reset_flight_time (void) |
| reset flight time and launch | |
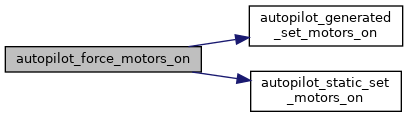
| void | autopilot_force_motors_on (bool motors_on) |
| Force the motors on/off skipping preflight checks. | |
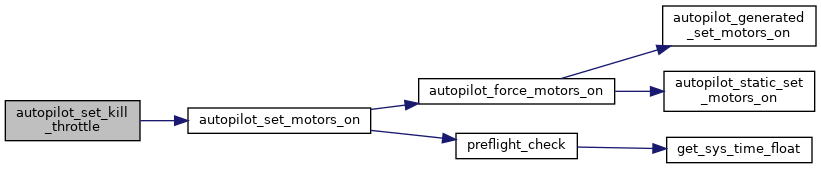
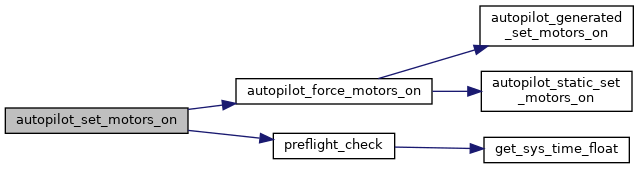
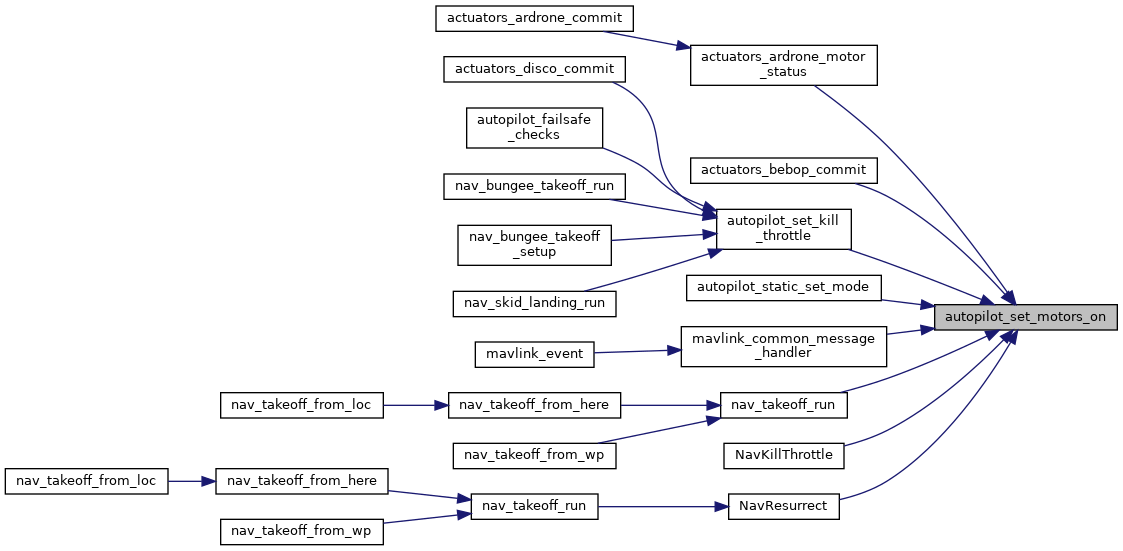
| bool | autopilot_set_motors_on (bool motors_on) |
| turn motors on/off, eventually depending of the current mode set kill_throttle accordingly FIXME is it true for FW firmware ? | |
| bool | autopilot_arming_motors_on (bool motors_on) |
| turn motors on/off during arming, not done automatically prevents takeoff with preflight checks | |
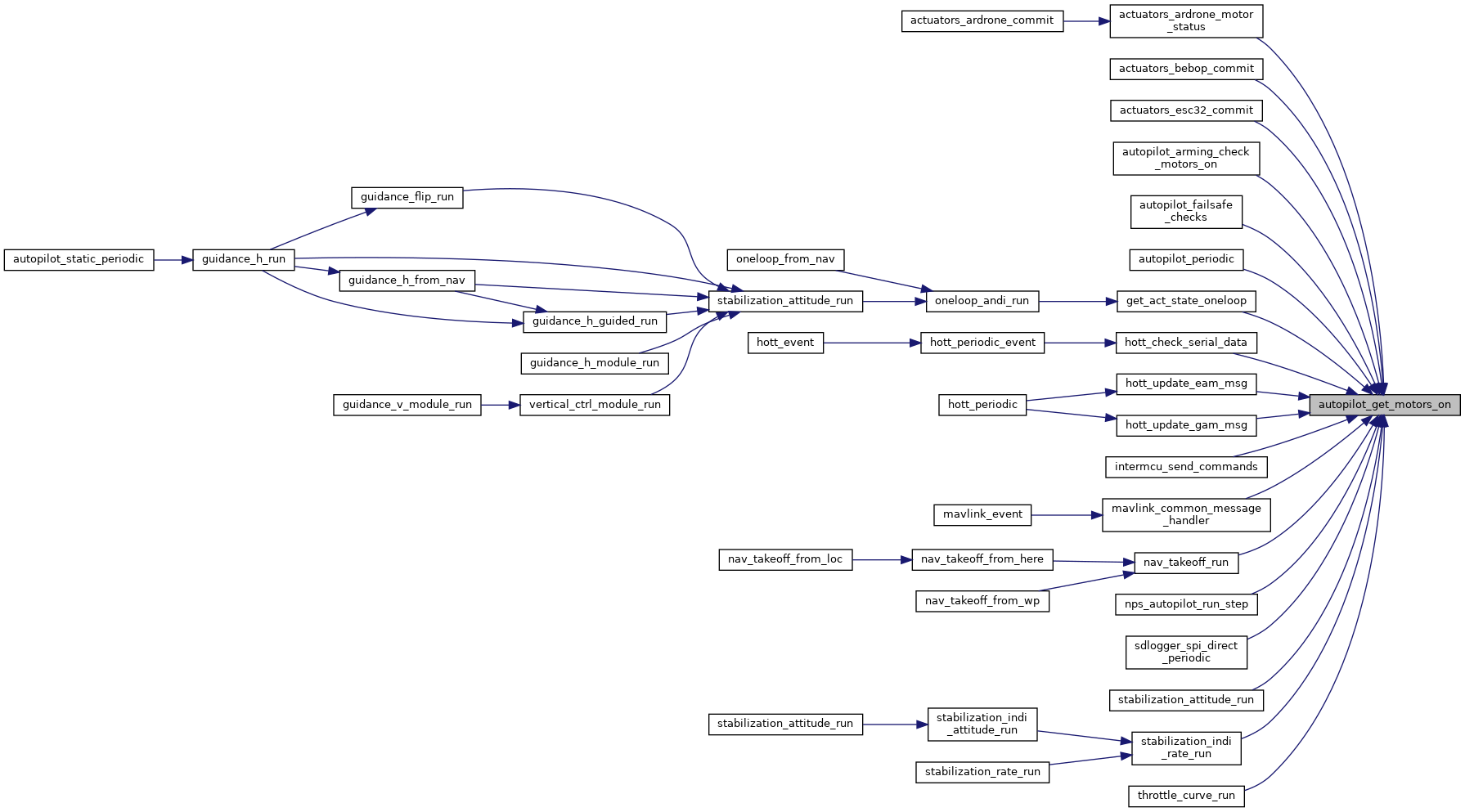
| bool | autopilot_get_motors_on (void) |
| get motors status | |
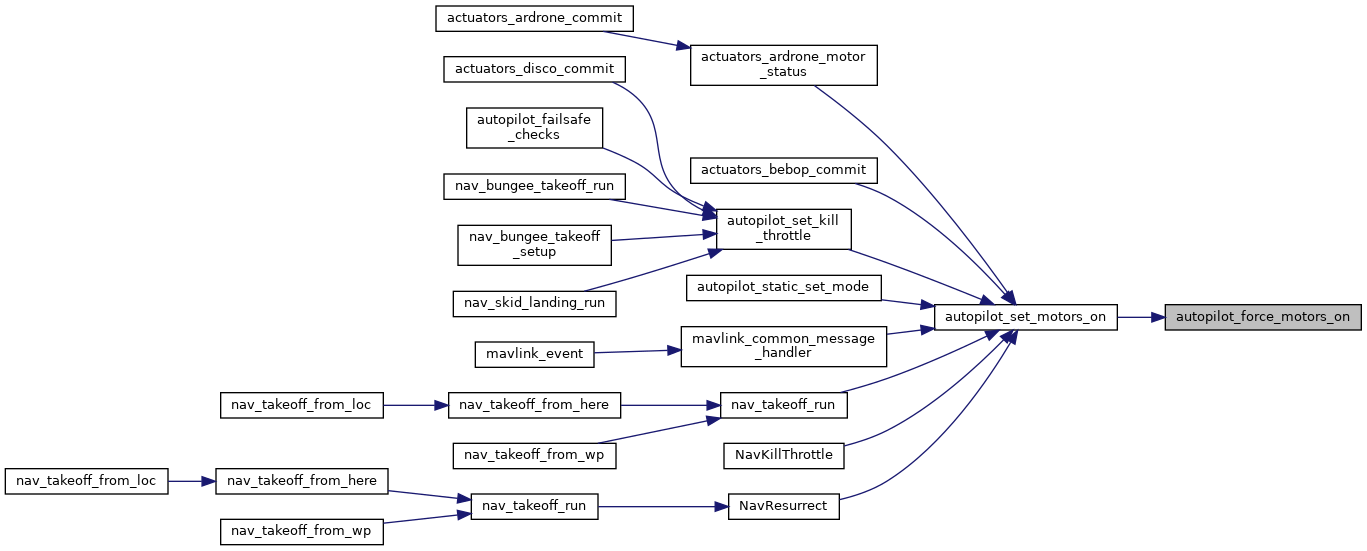
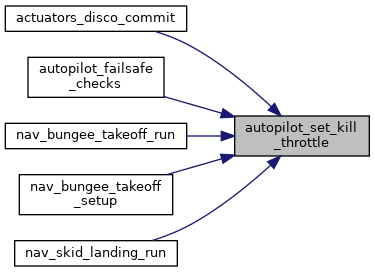
| void | autopilot_set_kill_throttle (bool kill) |
| set kill throttle | |
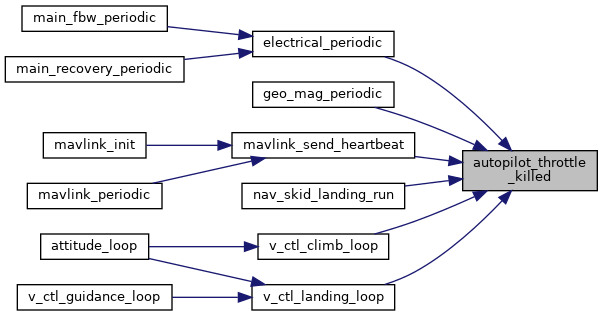
| bool | autopilot_throttle_killed (void) |
| get kill status | |
| void WEAK | autopilot_check_in_flight (bool motors_on) |
| in flight check utility function actual implementation is firmware dependent | |
| void WEAK | autopilot_reset_in_flight_counter (void) |
| reset in_flight counter actual implementation is firmware dependent | |
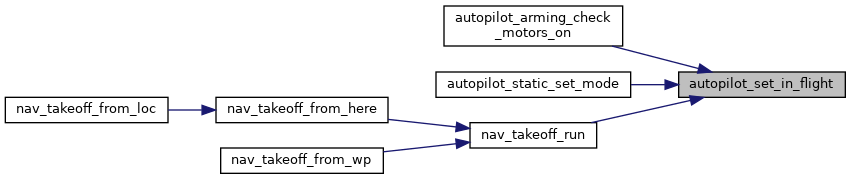
| void | autopilot_set_in_flight (bool in_flight) |
| set in_flight flag | |
| bool | autopilot_in_flight (void) |
| get in_flight flag | |
| void | autopilot_store_settings (void) |
| store settings | |
| void | autopilot_clear_settings (void) |
| clear settings | |
| void | autopilot_send_version (void) |
| send autopilot version | |
| void WEAK | autopilot_send_mode (void) |
| send autopilot mode actual implementation is firmware dependent | |
Variables | |
| struct pprz_autopilot | autopilot |
| Global autopilot structure. | |
| static abi_event | rc_ev |
Core autopilot interface common to all firmwares.
Using either static or generated autopilot logic, which depends on the firmware.
Definition in file autopilot.c.
| #define AUTOPILOT_RC_ID ABI_BROADCAST |
Definition at line 52 of file autopilot.c.
turn motors on/off during arming, not done automatically prevents takeoff with preflight checks
Start or stop the motors during arming May not happen when preflight checks are failing.
Definition at line 273 of file autopilot.c.
References autopilot, pprz_autopilot::motors_on, preflight_bypass, and preflight_check().
Referenced by autopilot_arming_check_motors_on(), autopilot_arming_check_motors_on(), and autopilot_arming_check_motors_on().
Here is the call graph for this function: Here is the caller graph for this function:in flight check utility function actual implementation is firmware dependent
Check if airframe is in flight.
Definition at line 321 of file autopilot.c.
Referenced by autopilot_periodic().
Here is the caller graph for this function:clear settings
Clear marked settings in flash try to make sure that we don't write to flash while flying Also provide macro for dl_setting backward compatibility.
Definition at line 357 of file autopilot.c.
References autopilot, pprz_autopilot::kill_throttle, settings_clear(), and settings_clear_flag.
Here is the call graph for this function:Failsafe checks.
Autopilot periodic failsafe checks.
Definition at line 189 of file autopilot.c.
Referenced by autopilot_periodic(), and main_ap_init().
Here is the caller graph for this function:Force the motors on/off skipping preflight checks.
Force start/stop the motors WARNING This will skip he preflight checks.
Definition at line 237 of file autopilot.c.
References autopilot, autopilot_generated_set_motors_on(), autopilot_static_set_motors_on(), pprz_autopilot::kill_throttle, and pprz_autopilot::motors_on.
Referenced by autopilot_set_motors_on().
Here is the call graph for this function: Here is the caller graph for this function:get autopilot mode
Get autopilot mode.
Definition at line 222 of file autopilot.c.
References autopilot, and pprz_autopilot::mode.
Referenced by attitude_loop(), autopilot_arming_check_motors_on(), autopilot_arming_check_motors_on(), autopilot_arming_check_motors_on(), autopilot_arming_check_valid(), autopilot_arming_set(), autopilot_failsafe_checks(), autopilot_static_on_rc_frame(), collective_tracking_control(), distributed_circular(), generic_com_periodic(), guidance_flip_enter(), gvf_low_level_control_2D(), gvf_low_level_control_3D(), h_ctl_pitch_loop(), h_ctl_roll_loop(), mavlink_common_message_handler(), mavlink_send_heartbeat(), navigation_task(), NavKillThrottle(), NavResurrect(), periodic_auto1_commands(), pprz_mode_update(), send_fbw_status(), send_mode(), takeoff_detect_periodic(), v_ctl_set_pitch(), v_ctl_set_throttle(), and wedgebug_periodic().
Here is the caller graph for this function:get motors status
Get motor status.
Definition at line 295 of file autopilot.c.
References autopilot, and pprz_autopilot::motors_on.
Referenced by actuators_ardrone_motor_status(), actuators_bebop_commit(), actuators_esc32_commit(), autopilot_arming_check_motors_on(), autopilot_failsafe_checks(), autopilot_periodic(), control_mixing_heewing_attitude_direct(), control_mixing_heewing_nav_run(), get_act_state_oneloop(), hott_check_serial_data(), hott_update_eam_msg(), hott_update_gam_msg(), intermcu_send_commands(), mavlink_common_message_handler(), nav_takeoff_run(), nav_takeoff_run(), nps_autopilot_run_step(), sdlogger_spi_direct_periodic(), stabilization_attitude_run(), stabilization_indi_rate_run(), and throttle_curve_run().
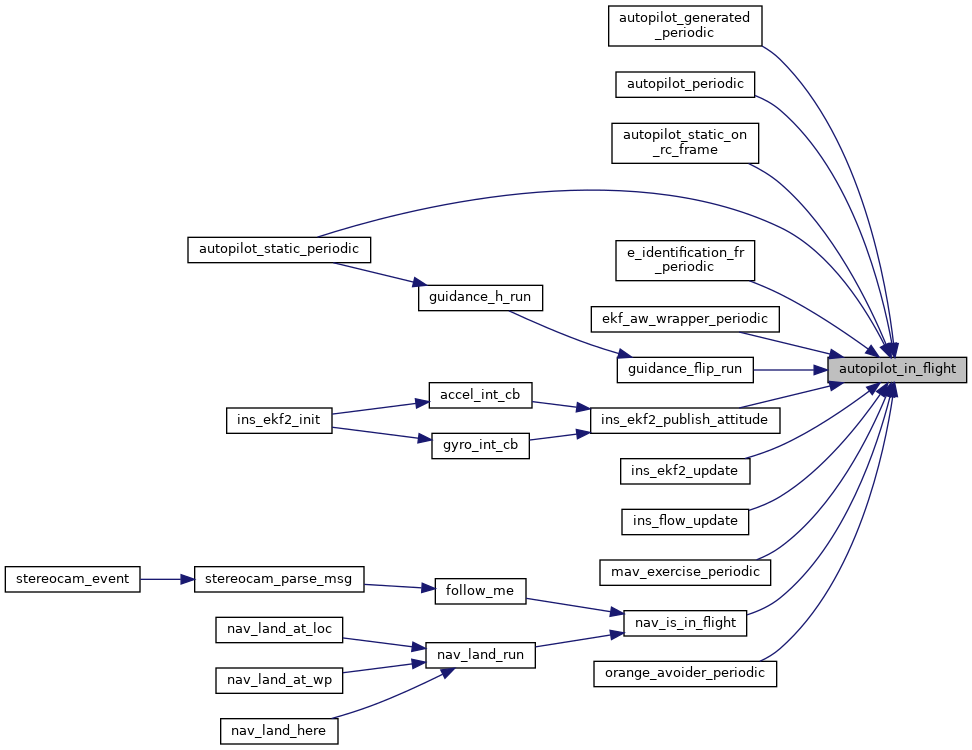
Here is the caller graph for this function:get in_flight flag
Get in flight status.
Definition at line 340 of file autopilot.c.
References autopilot, and pprz_autopilot::in_flight.
Referenced by autopilot_generated_periodic(), autopilot_periodic(), autopilot_static_periodic(), control_mixing_heewing_attitude_direct(), control_mixing_heewing_attitude_plane(), control_mixing_heewing_nav_run(), e_identification_fr_periodic(), ekf_aw_wrapper_periodic(), guidance_flip_run(), guidance_module_enter(), guidance_module_run(), ins_ekf2_update(), ins_flow_update(), mav_exercise_periodic(), mavlink_send_extended_sys_state(), nav_is_in_flight(), orange_avoider_periodic(), rc_cb(), and rc_cb().
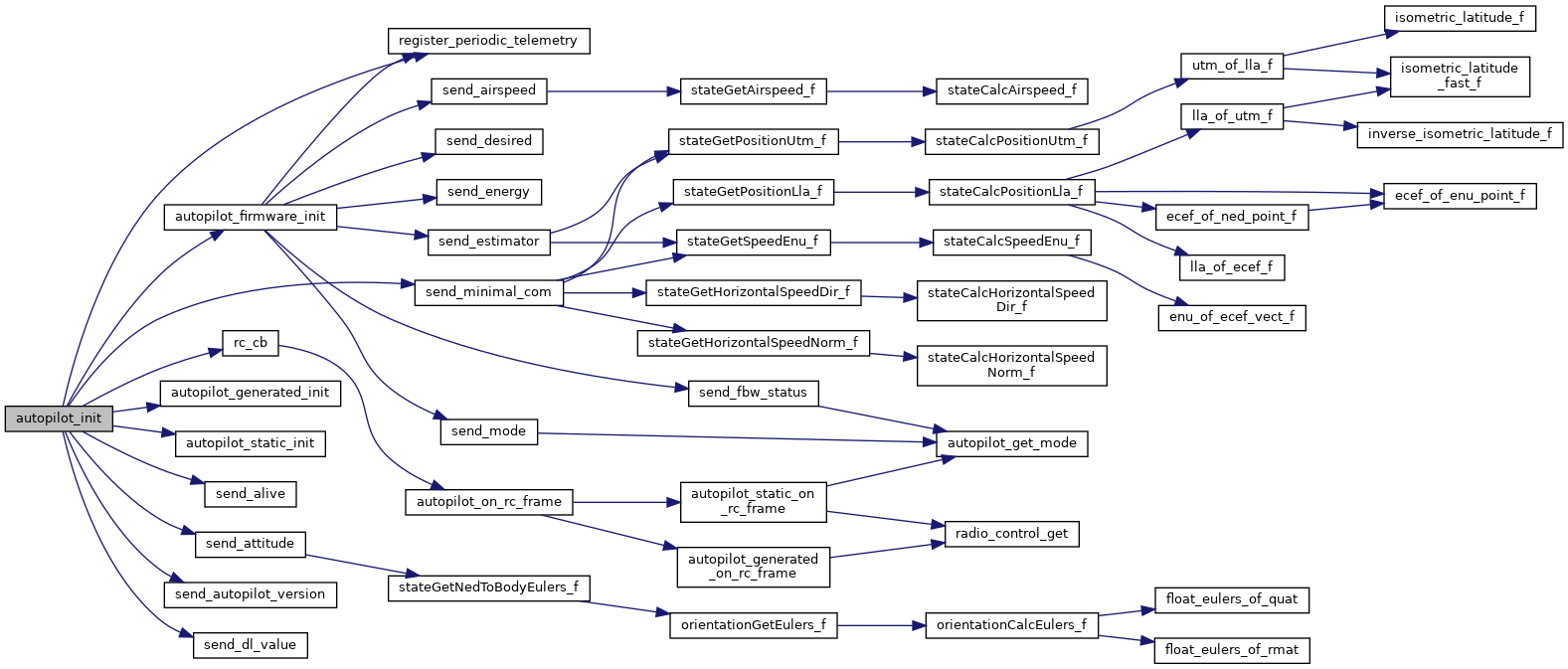
Here is the caller graph for this function:Autopilot initialization function.
Definition at line 107 of file autopilot.c.
References autopilot, autopilot_firmware_init(), autopilot_generated_init(), AUTOPILOT_RC_ID, autopilot_static_init(), DefaultPeriodic, pprz_autopilot::detect_ground_once, pprz_autopilot::flight_time, foo, pprz_autopilot::ground_detected, pprz_autopilot::in_flight, pprz_autopilot::kill_throttle, pprz_autopilot::mode_auto2, MODE_AUTO2, pprz_autopilot::motors_on, rc_cb(), rc_ev, register_periodic_telemetry(), send_alive(), send_attitude(), send_autopilot_version(), send_dl_value(), send_minimal_com(), pprz_autopilot::throttle, and pprz_autopilot::use_rc.
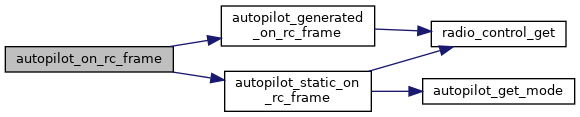
Here is the call graph for this function:RC frame handler.
Autopilot RC input event hadler.
Definition at line 178 of file autopilot.c.
References autopilot_generated_on_rc_frame(), and autopilot_static_on_rc_frame().
Referenced by rc_cb().
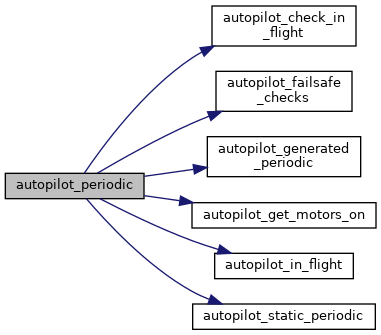
Here is the call graph for this function: Here is the caller graph for this function:AP periodic call.
Autopilot periodic call at PERIODIC_FREQUENCY.
Definition at line 146 of file autopilot.c.
References autopilot, autopilot_check_in_flight(), autopilot_failsafe_checks(), autopilot_generated_periodic(), autopilot_get_motors_on(), autopilot_in_flight(), autopilot_static_periodic(), pprz_autopilot::flight_time, and foo.
Here is the call graph for this function:reset flight time and launch
Reset flight time and launch status Also provide macro for dl_setting backward compatibility.
Definition at line 229 of file autopilot.c.
References autopilot, pprz_autopilot::flight_time, and pprz_autopilot::launch.
reset in_flight counter actual implementation is firmware dependent
Definition at line 326 of file autopilot.c.
Referenced by autopilot_set_in_flight().
Here is the caller graph for this function:send autopilot mode actual implementation is firmware dependent
Report autopilot mode on default downlink channel.
Definition at line 375 of file autopilot.c.
Referenced by autopilot_set_mode().
Here is the caller graph for this function:send autopilot version
Report autopilot version on default downlink channel.
Definition at line 367 of file autopilot.c.
References DefaultChannel, DefaultDevice, and send_autopilot_version().
Referenced by telemetry_reporting_task().
Here is the call graph for this function: Here is the caller graph for this function:set in_flight flag
Set in flight status.
Definition at line 330 of file autopilot.c.
References autopilot, autopilot_reset_in_flight_counter(), and pprz_autopilot::in_flight.
Referenced by autopilot_arming_check_motors_on(), autopilot_static_set_mode(), and nav_takeoff_run().
Here is the call graph for this function: Here is the caller graph for this function:set kill throttle
Enable or disable motor control from autopilot Also provide macro for dl_setting backward compatibility.
Definition at line 302 of file autopilot.c.
References autopilot_set_motors_on(), and foo.
Referenced by actuators_disco_commit(), autopilot_failsafe_checks(), nav_bungee_takeoff_run(), nav_bungee_takeoff_setup(), and nav_skid_landing_run().
Here is the call graph for this function: Here is the caller graph for this function:set autopilot mode
Set new autopilot mode.
Definition at line 193 of file autopilot.c.
References autopilot, autopilot_generated_set_mode(), autopilot_send_mode(), autopilot_static_set_mode(), foo, pprz_autopilot::mode, and mode.
Referenced by autopilot_failsafe_checks(), guidance_flip_run(), guidance_module_run(), mavlink_common_message_handler(), nav_set_failsafe(), and pprz_mode_update().
Here is the call graph for this function: Here is the caller graph for this function:turn motors on/off, eventually depending of the current mode set kill_throttle accordingly FIXME is it true for FW firmware ?
Start or stop motors May have no effect if motors has auto-start based on throttle setpoint or when the preflight checks are failing.
Definition at line 250 of file autopilot.c.
References autopilot, autopilot_force_motors_on(), pprz_autopilot::motors_on, preflight_bypass, and preflight_check().
Referenced by actuators_ardrone_motor_status(), actuators_bebop_commit(), autopilot_set_kill_throttle(), autopilot_static_set_mode(), ground_detect_periodic(), mavlink_common_message_handler(), nav_takeoff_run(), NavKillThrottle(), and NavResurrect().
Here is the call graph for this function: Here is the caller graph for this function:AP mode setting handler.
Handler for setter function with dl_setting.
Definition at line 211 of file autopilot.c.
References autopilot_generated_SetModeHandler(), autopilot_static_SetModeHandler(), and mode.
Here is the call graph for this function:store settings
Store marked settings in flash Try to make sure that we don't write to flash while flying Also provide macro for dl_setting backward compatibility.
Definition at line 347 of file autopilot.c.
References autopilot, pprz_autopilot::kill_throttle, settings_store(), and settings_store_flag.
Here is the call graph for this function:get kill status
Get kill status.
Definition at line 313 of file autopilot.c.
References autopilot, and pprz_autopilot::kill_throttle.
Referenced by electrical_periodic(), geo_mag_periodic(), mavlink_send_heartbeat(), nav_skid_landing_run(), v_ctl_climb_loop(), and v_ctl_landing_loop().
Here is the caller graph for this function:
|
static |
Definition at line 57 of file autopilot.c.
References autopilot_on_rc_frame().
Referenced by autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 71 of file autopilot.c.
Referenced by autopilot_init().
Here is the caller graph for this function:
|
static |
Definition at line 76 of file autopilot.c.
References dev, foo, FloatEulers::phi, FloatEulers::psi, stateGetNedToBodyEulers_f(), and FloatEulers::theta.
Referenced by autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 64 of file autopilot.c.
Referenced by autopilot_init(), and autopilot_send_version().
Here is the caller graph for this function:
|
static |
Definition at line 82 of file autopilot.c.
Referenced by autopilot_init().
Here is the caller graph for this function:
|
static |
Definition at line 87 of file autopilot.c.
References UtmCoor_f::alt, autopilot, course, dev, electrical, GpsState::fix, pprz_autopilot::flight_time, foo, gps, MAX_PPRZ, pprz_autopilot::mode, nav_block, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetPositionLla_f(), stateGetPositionUtm_f(), stateGetSpeedEnu_f(), pprz_autopilot::throttle, Electrical::vsupply, and EnuCoor_f::z.
Referenced by autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:| struct pprz_autopilot autopilot |
Global autopilot structure.
Definition at line 49 of file autopilot.c.
Referenced by attitude_loop(), autopilot_arming_check_motors_on(), autopilot_arming_check_motors_on(), autopilot_arming_check_valid(), autopilot_arming_check_valid(), autopilot_arming_motors_on(), autopilot_check_in_flight(), autopilot_clear_settings(), autopilot_event(), autopilot_failsafe_checks(), autopilot_force_motors_on(), autopilot_generated_init(), autopilot_generated_on_rc_frame(), autopilot_generated_periodic(), autopilot_generated_set_mode(), autopilot_generated_set_motors_on(), autopilot_get_mode(), autopilot_get_motors_on(), autopilot_in_flight(), autopilot_init(), autopilot_periodic(), autopilot_reset_flight_time(), autopilot_set_in_flight(), autopilot_set_mode(), autopilot_set_motors_on(), autopilot_static_init(), autopilot_static_on_rc_frame(), autopilot_static_periodic(), autopilot_static_set_mode(), autopilot_static_set_motors_on(), autopilot_store_settings(), autopilot_throttle_killed(), calc_flight_time_left(), check_parachute_arming(), check_parachute_trigger(), control_mixing_heewing_attitude_direct(), control_mixing_heewing_attitude_plane(), control_mixing_heewing_manual(), control_mixing_heewing_nav_run(), draw_osd(), Drift_correction(), e_identification_fr_periodic(), eff_scheduling_rotwing_update_hover_motor_effectiveness(), gazebo_write(), generic_com_periodic(), gsm_send_report_continue(), h_ctl_course_loop(), h_ctl_pitch_loop(), h_ctl_roll_loop(), main_recovery_init(), mf_daq_send_state(), monitor_task(), nav_bungee_takeoff_run(), nav_catapult_highrate_module(), nav_check_wp_time(), nav_check_wp_time(), nav_detect_ground(), nav_home(), nav_takeoff_run(), nps_autopilot_run_step(), oneloop_andi_run(), parse_mf_daq_msg(), rotwing_state_choose_state_by_dist(), rotwing_state_periodic(), send_energy(), send_fp(), send_minimal_com(), send_mode(), send_status(), takeoff_detect_periodic(), uav_recovery_periodic(), v_ctl_climb_loop(), v_ctl_guidance_loop(), v_ctl_set_pitch(), and v_ctl_set_throttle().
|
static |
Definition at line 55 of file autopilot.c.
Referenced by autopilot_init().