|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Horizontal guidance for rotorcrafts. More...
#include "generated/airframe.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "firmwares/rotorcraft/guidance/guidance_module.h"#include "firmwares/rotorcraft/stabilization.h"#include "firmwares/rotorcraft/navigation.h"#include "firmwares/rotorcraft/autopilot_rc_helpers.h"#include "modules/radio_control/radio_control.h"#include "modules/core/abi.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "state.h"#include "modules/datalink/telemetry.h" Include dependency graph for guidance_h.c:
Include dependency graph for guidance_h.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_H_RC_ID ABI_BROADCAST |
| #define | GUIDANCE_H_SP_MAX_R 60.f |
| #define | GUIDANCE_H_DEADBAND_R 200 |
| #define | YAW_DEADBAND_EXCEEDED(_rc) |
Variables | |
| struct HorizontalGuidance | guidance_h |
| struct StabilizationSetpoint | guidance_h_cmd |
| horizontal guidance command. | |
| static abi_event | rc_ev |
Horizontal guidance for rotorcrafts.
Definition in file guidance_h.c.
| #define GUIDANCE_H_DEADBAND_R 200 |
Definition at line 160 of file guidance_h.c.
| #define GUIDANCE_H_RC_ID ABI_BROADCAST |
Definition at line 55 of file guidance_h.c.
Definition at line 155 of file guidance_h.c.
Definition at line 163 of file guidance_h.c.
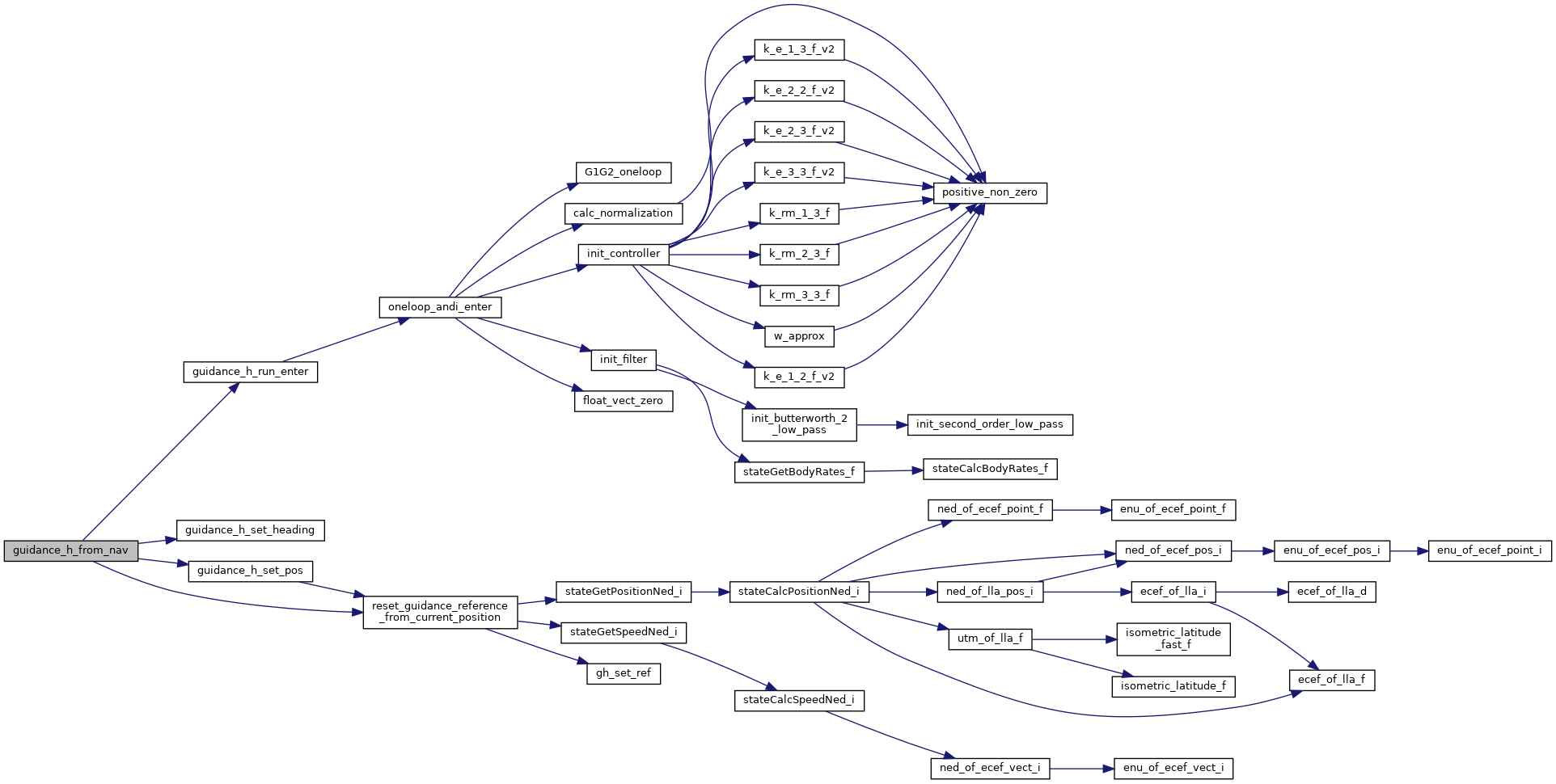
| struct StabilizationSetpoint guidance_h_from_nav | ( | bool | in_flight | ) |
Set horizontal guidance from NAV and run control loop.
Definition at line 391 of file guidance_h.c.
References RotorcraftNavigation::accel, RotorcraftNavigation::carrot, foo, RotorcraftNavigation::fp_max_speed, guidance_h, guidance_h_cmd, guidance_h_guided_run(), guidance_h_nav_enter(), guidance_h_run_accel(), guidance_h_run_pos(), guidance_h_run_speed(), guidance_h_set_acc(), guidance_h_set_heading(), guidance_h_set_pos(), guidance_h_set_vel(), guidance_h_SetMaxSpeed(), guidance_h_update_reference(), RotorcraftNavigation::heading, RotorcraftNavigation::horizontal_mode, nav, NAV_HORIZONTAL_MODE_ATTITUDE, NAV_HORIZONTAL_MODE_GUIDED, NAV_HORIZONTAL_MODE_NONE, NAV_SETPOINT_MODE_ACCEL, NAV_SETPOINT_MODE_POS, NAV_SETPOINT_MODE_QUAT, NAV_SETPOINT_MODE_SPEED, FloatEulers::phi, RotorcraftNavigation::pitch, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, RotorcraftNavigation::quat, RotorcraftNavigation::roll, RotorcraftNavigation::setpoint_mode, HorizontalGuidance::sp, StabilizationSetpoint::sp, RotorcraftNavigation::speed, stab_sp_from_eulers_f(), stab_sp_from_quat_f(), STAB_SP_SET_EULERS_ZERO, Int32Vect2::x, EnuCoor_f::x, Int32Vect2::y, and EnuCoor_f::y.
Referenced by guidance_h_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct StabilizationSetpoint guidance_h_guided_run | ( | bool | in_flight | ) |
Run GUIDED mode control.
Definition at line 457 of file guidance_h.c.
References guidance_h, guidance_h_cmd, guidance_h_hover_enter(), guidance_h_run_pos(), guidance_h_run_speed(), guidance_h_update_reference(), HorizontalGuidanceSetpoint::h_mask, and HorizontalGuidance::sp.
Referenced by guidance_h_from_nav(), and guidance_h_run().
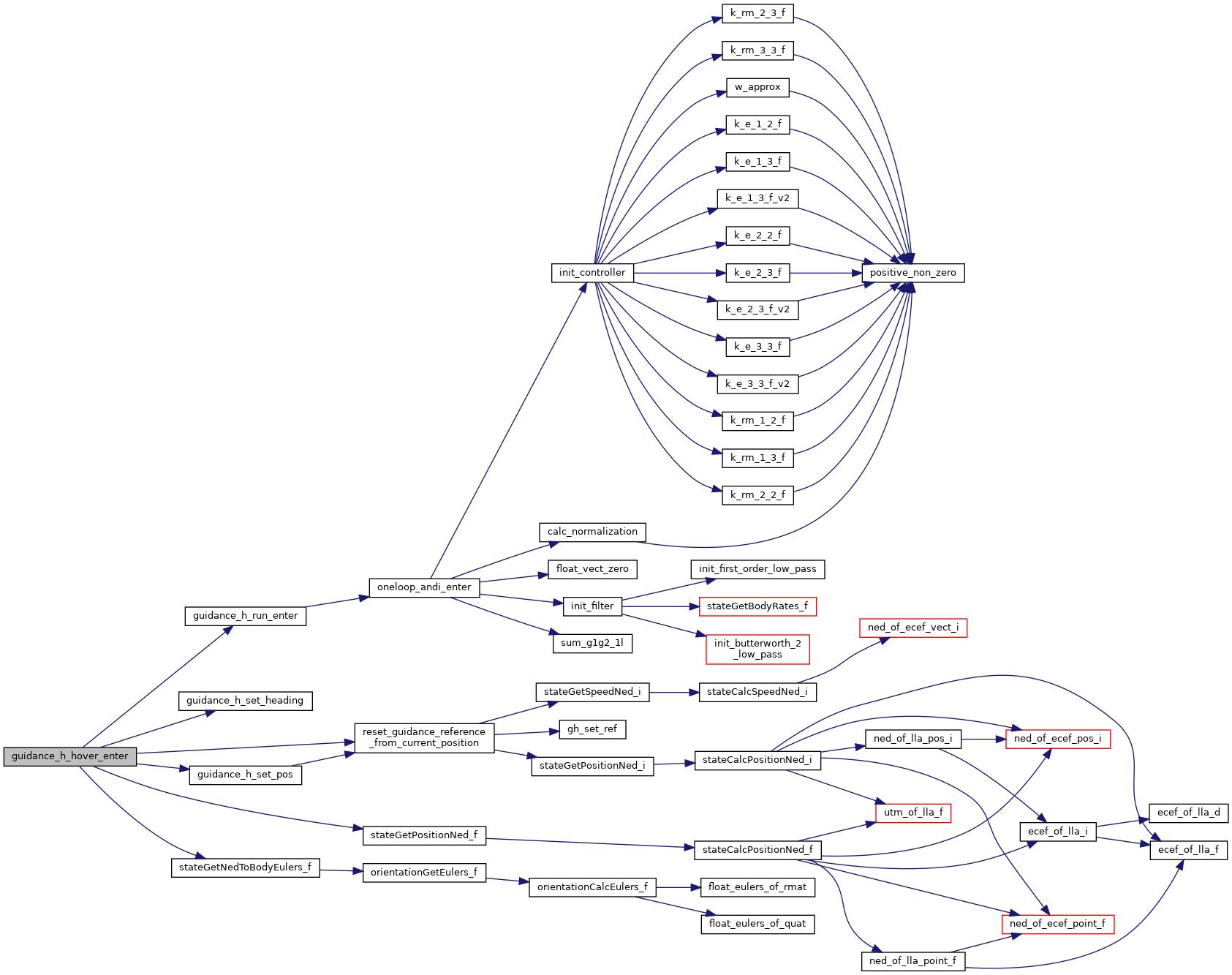
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 359 of file guidance_h.c.
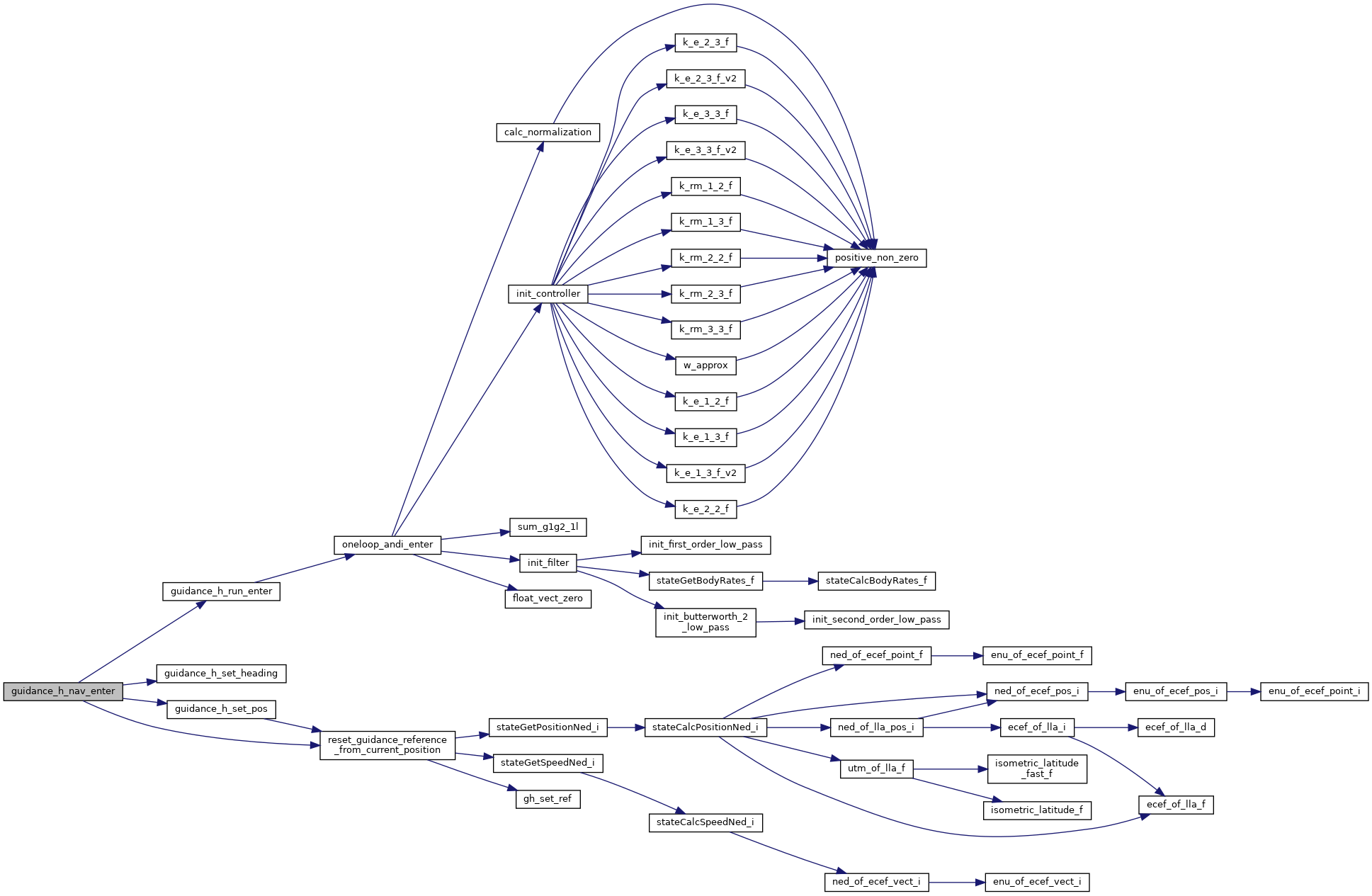
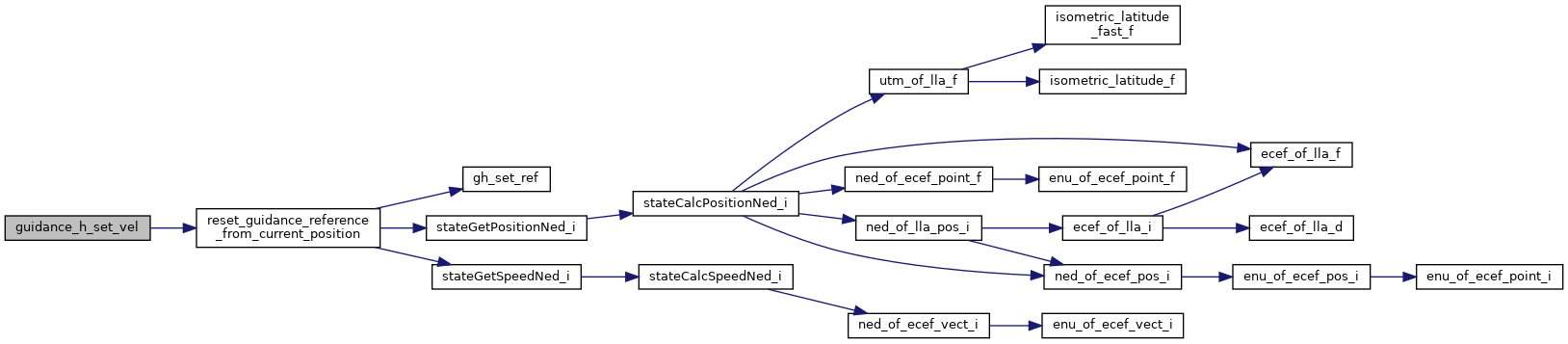
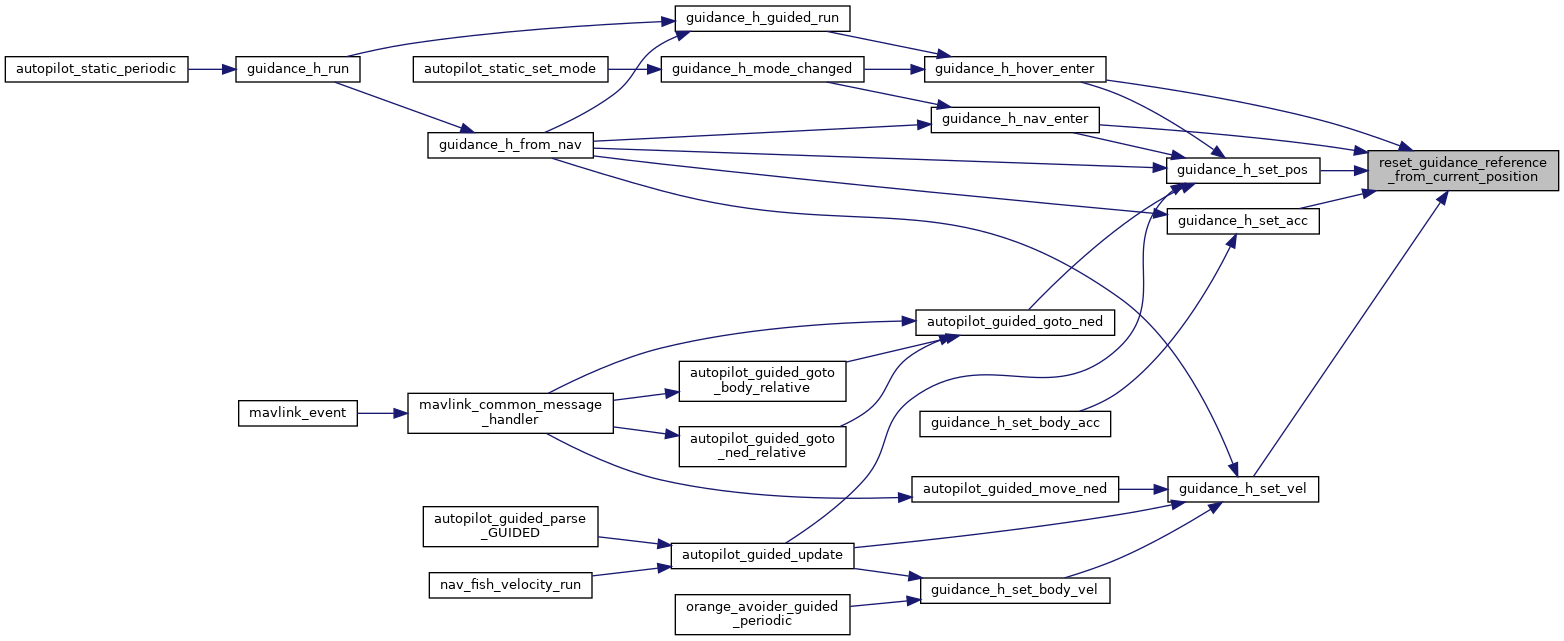
References guidance_h, guidance_h_run_enter(), guidance_h_set_heading(), guidance_h_set_pos(), HorizontalGuidanceRCInput::heading, FloatEulers::psi, HorizontalGuidance::rc_sp, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, stateGetNedToBodyEulers_f(), stateGetPositionNed_f(), FloatVect2::x, Int32Vect2::x, FloatVect2::y, and Int32Vect2::y.
Referenced by guidance_h_guided_run(), guidance_h_mode_changed(), and wedgebug_periodic().
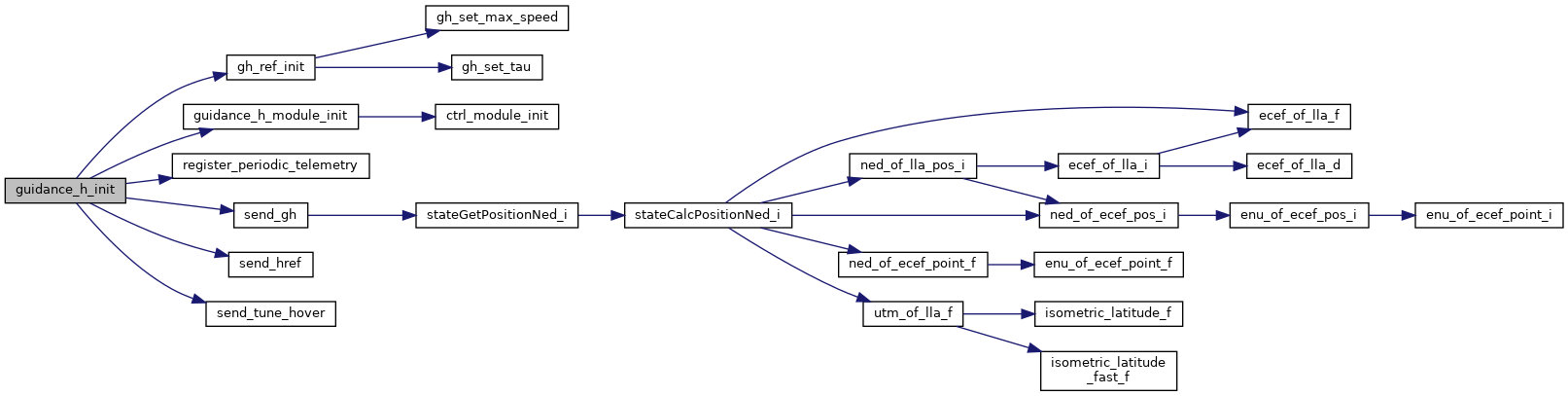
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 86 of file guidance_h.c.
References DefaultPeriodic, foo, gh_ref_init(), guidance_h, GUIDANCE_H_MODE_NONE, GUIDANCE_H_RC_ID, GUIDANCE_H_USE_REF, HorizontalGuidanceSetpoint::h_mask, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceRCInput::heading, HorizontalGuidanceSetpoint::heading_rate, INT_VECT2_ZERO, HorizontalGuidanceRCInput::last_ts, HorizontalGuidance::mode, HorizontalGuidanceSetpoint::pos, rc_cb(), rc_ev, HorizontalGuidance::rc_sp, register_periodic_telemetry(), send_gh(), send_href(), HorizontalGuidance::sp, HorizontalGuidance::use_ref, HorizontalGuidanceRCInput::vect, and HorizontalGuidanceSetpoint::yaw_mask.
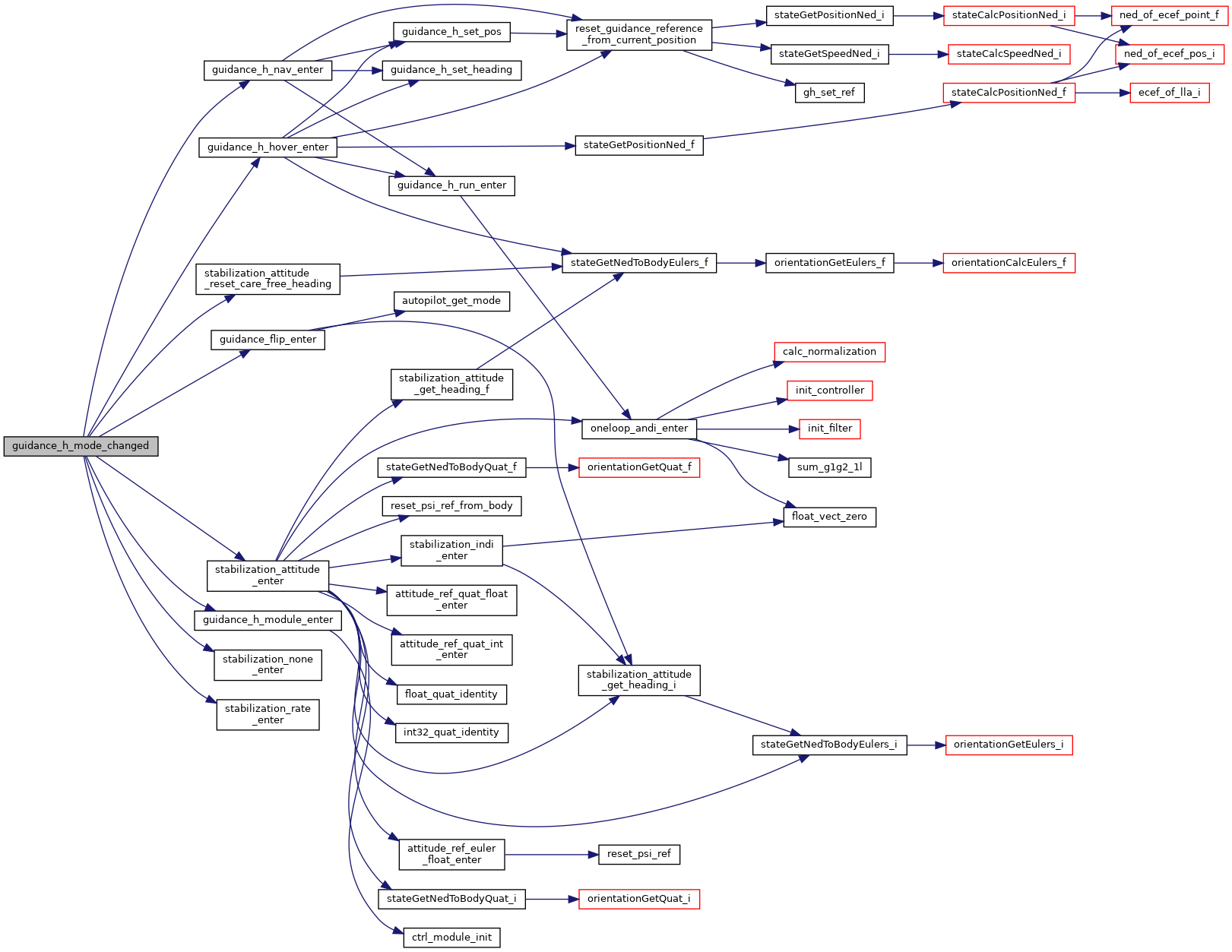
Here is the call graph for this function:Definition at line 128 of file guidance_h.c.
References foo, guidance_h, guidance_h_hover_enter(), GUIDANCE_H_MODE_GUIDED, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_NAV, guidance_h_nav_enter(), and HorizontalGuidance::mode.
Referenced by autopilot_static_set_mode(), control_mixing_heewing_attitude_direct_enter(), control_mixing_heewing_attitude_plane_enter(), control_mixing_heewing_nav_enter(), and guidance_module_enter().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 380 of file guidance_h.c.
References RotorcraftNavigation::carrot, guidance_h_run_enter(), guidance_h_set_heading(), guidance_h_set_pos(), RotorcraftNavigation::heading, nav, reset_guidance_reference_from_current_position(), EnuCoor_f::x, and EnuCoor_f::y.
Referenced by guidance_h_from_nav(), and guidance_h_mode_changed().
Here is the call graph for this function: Here is the caller graph for this function:| struct StabilizationSetpoint guidance_h_run | ( | bool | in_flight | ) |
Definition at line 244 of file guidance_h.c.
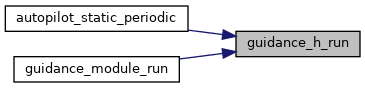
References guidance_h, guidance_h_from_nav(), guidance_h_guided_run(), GUIDANCE_H_MODE_GUIDED, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_NAV, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceRCInput::heading, HorizontalGuidance::mode, HorizontalGuidance::rc_sp, HorizontalGuidance::sp, StabilizationSetpoint::sp, and STAB_SP_SET_EULERS_ZERO.
Referenced by autopilot_static_periodic(), control_mixing_heewing_nav_run(), and guidance_module_run().
Here is the call graph for this function: Here is the caller graph for this function:Set horizontal acceleration setpoint.
| ax | North acceleration (local NED frame) in meters/sec². |
| ay | East acceleration (local NED frame) in meters/sec². |
Definition at line 520 of file guidance_h.c.
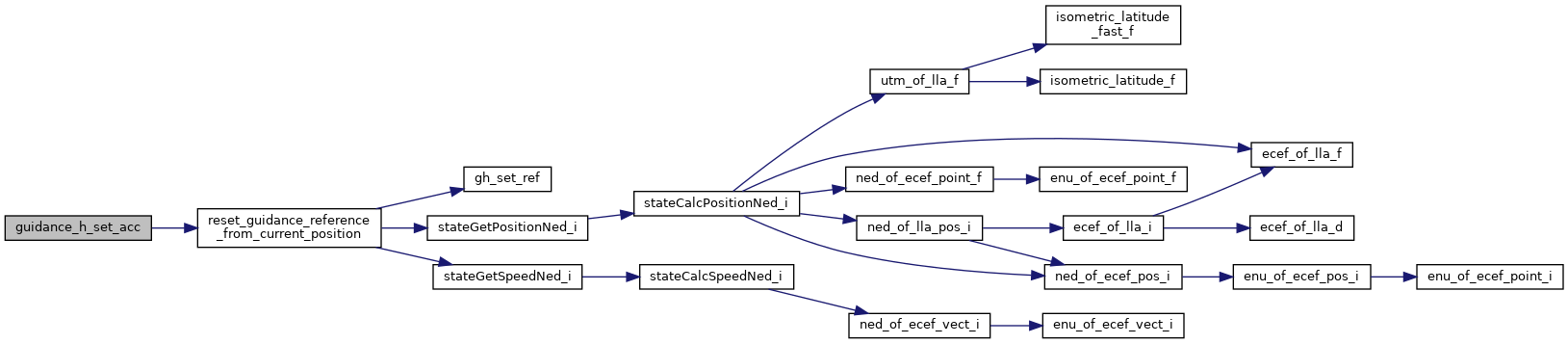
References HorizontalGuidanceSetpoint::accel, ACCEL_BFP_OF_REAL, guidance_h, HorizontalGuidanceSetpoint::h_mask, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_from_nav(), and guidance_h_set_body_acc().
Here is the call graph for this function: Here is the caller graph for this function:Set position speed and acceleration (NED frame).
| x | North position (local NED frame) in meters. |
| y | East position (local NED frame) in meters. |
| vx | North velocity (local NED frame) in meters/sec. |
| vy | East velocity (local NED frame) in meters/sec. |
| ax | North acceleration (local NED frame) in meters/sec². |
| ay | East acceleration (local NED frame) in meters/sec². |
Definition at line 536 of file guidance_h.c.
References HorizontalGuidanceSetpoint::accel, ACCEL_BFP_OF_REAL, guidance_h, HorizontalGuidanceSetpoint::h_mask, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, SPEED_BFP_OF_REAL, Int32Vect2::x, and Int32Vect2::y.
Set body relative horizontal acceleration setpoint.
| ax | forward acceleration (body frame) in meters/sec². |
| ay | right acceleration (body frame) in meters/sec². |
Definition at line 512 of file guidance_h.c.
References foo, guidance_h_set_acc(), FloatEulers::psi, and stateGetNedToBodyEulers_f().
Here is the call graph for this function:Set body relative horizontal velocity setpoint.
| vx | forward velocity (body frame) in meters/sec. |
| vy | right velocity (body frame) in meters/sec. |
Definition at line 494 of file guidance_h.c.
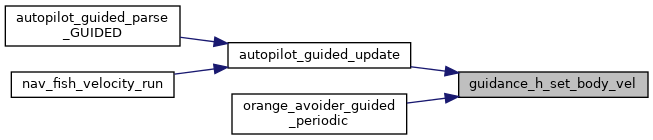
References foo, guidance_h_set_vel(), FloatEulers::psi, and stateGetNedToBodyEulers_f().
Referenced by orange_avoider_guided_periodic().
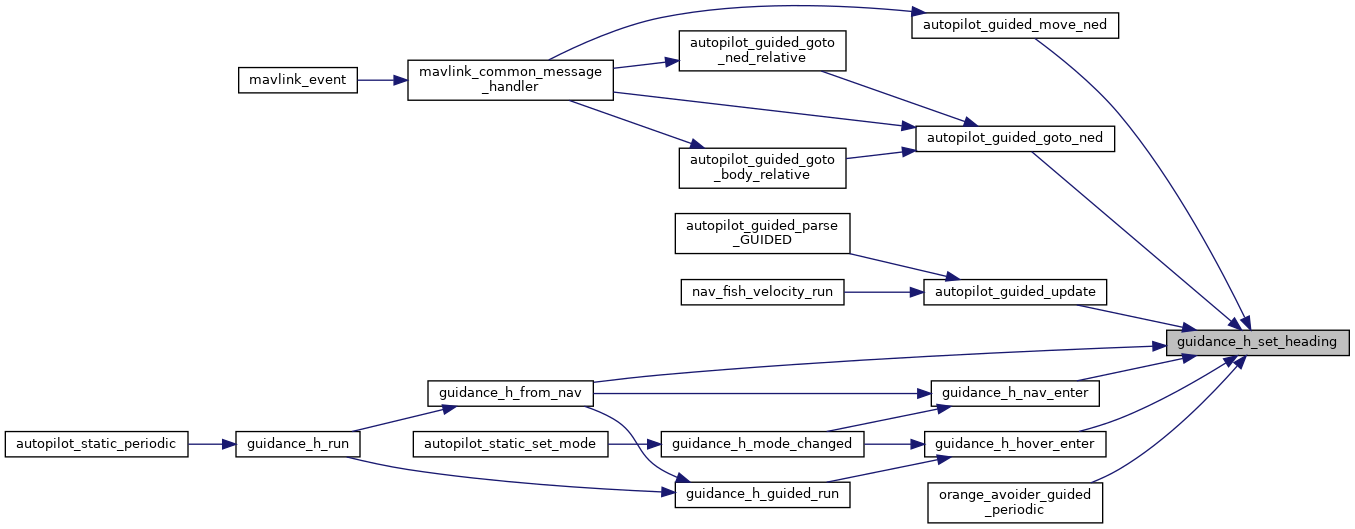
Here is the call graph for this function: Here is the caller graph for this function:Set heading setpoint.
| heading | Setpoint in radians. |
Definition at line 487 of file guidance_h.c.
References FLOAT_ANGLE_NORMALIZE, guidance_h, HorizontalGuidanceSetpoint::heading, heading, HorizontalGuidance::sp, and HorizontalGuidanceSetpoint::yaw_mask.
Referenced by guidance_h_from_nav(), guidance_h_hover_enter(), guidance_h_nav_enter(), orange_avoider_guided_periodic(), and wedgebug_periodic().
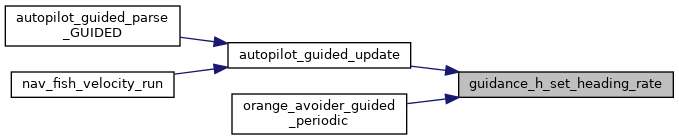
Here is the caller graph for this function:Set heading rate setpoint.
| rate | Heading rate in radians. |
Definition at line 530 of file guidance_h.c.
References guidance_h, HorizontalGuidanceSetpoint::heading_rate, HorizontalGuidance::sp, and HorizontalGuidanceSetpoint::yaw_mask.
Referenced by orange_avoider_guided_periodic().
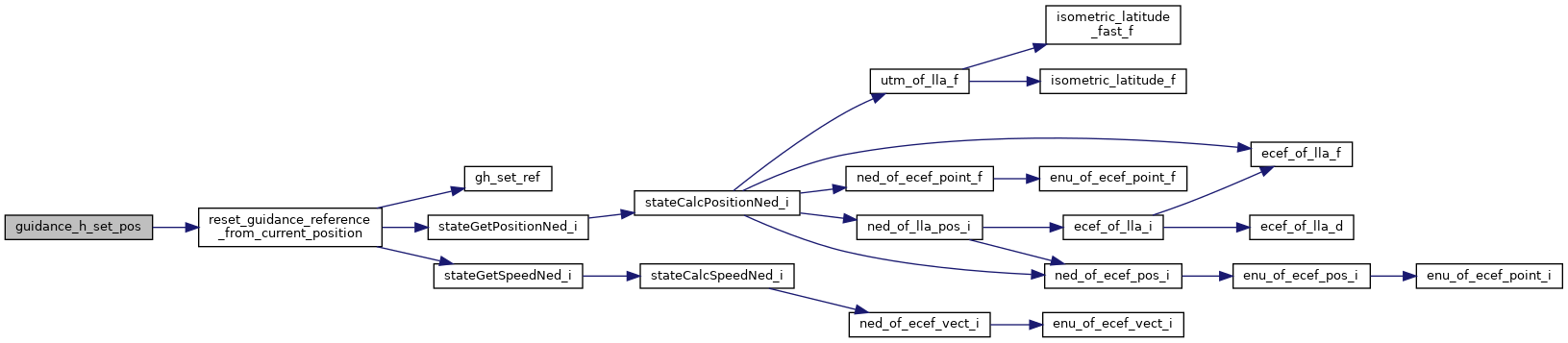
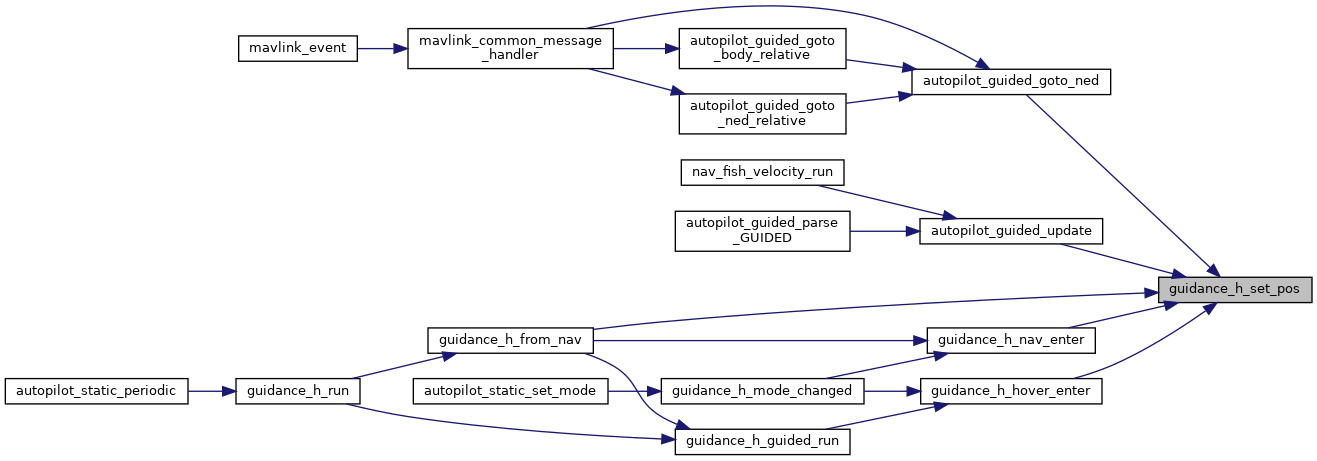
Here is the caller graph for this function:Set horizontal position setpoint.
| x | North position (local NED frame) in meters. |
| y | East position (local NED frame) in meters. |
Definition at line 477 of file guidance_h.c.
References guidance_h, HorizontalGuidanceSetpoint::h_mask, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_from_nav(), guidance_h_hover_enter(), guidance_h_nav_enter(), and wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Set horizontal velocity setpoint.
| vx | North velocity (local NED frame) in meters/sec. |
| vy | East velocity (local NED frame) in meters/sec. |
Definition at line 502 of file guidance_h.c.
References guidance_h, HorizontalGuidanceSetpoint::h_mask, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, SPEED_BFP_OF_REAL, Int32Vect2::x, and Int32Vect2::y.
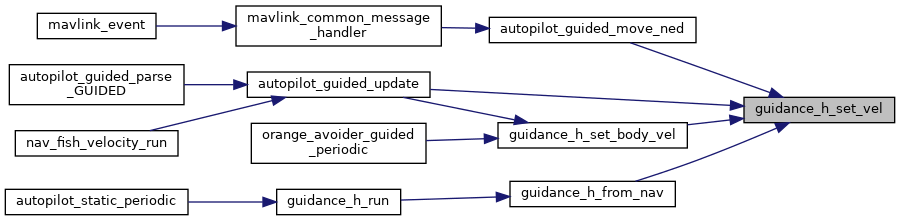
Referenced by guidance_h_from_nav(), and guidance_h_set_body_vel().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 273 of file guidance_h.c.
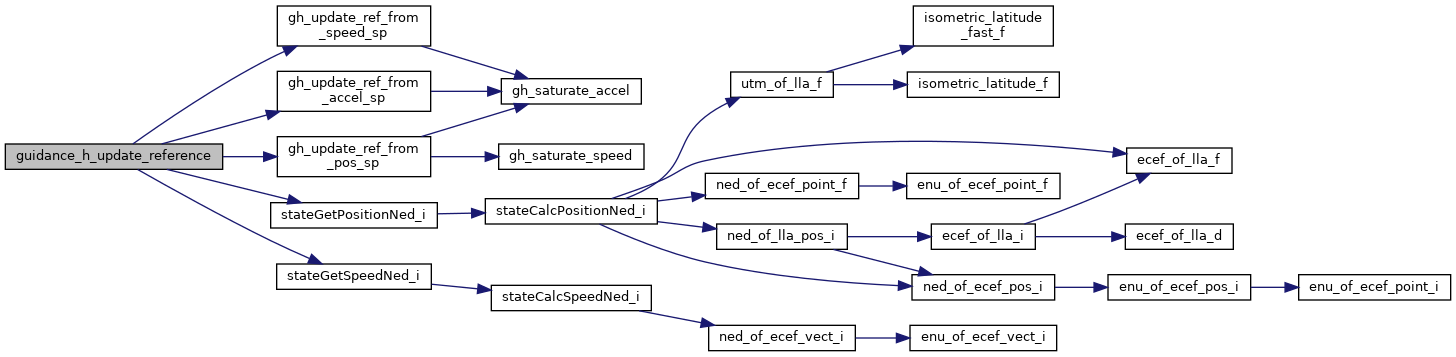
References HorizontalGuidanceSetpoint::accel, HorizontalGuidanceReference::accel, GuidanceHRef::accel, ACCEL_BFP_OF_REAL, ACCEL_FLOAT_OF_BFP, FLOAT_ANGLE_NORMALIZE, foo, GH_POS_REF_FRAC, gh_ref, gh_set_ref(), gh_update_ref_from_accel_sp(), gh_update_ref_from_pos_sp(), gh_update_ref_from_speed_sp(), guidance_h, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_NAV, HorizontalGuidanceSetpoint::h_mask, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceSetpoint::heading_rate, INT32_POS_FRAC, INT32_VECT2_RSHIFT, INT_VECT2_ZERO, HorizontalGuidance::mode, nav, NAV_SETPOINT_MODE_ACCEL, NAV_SETPOINT_MODE_POS, NAV_SETPOINT_MODE_SPEED, HorizontalGuidanceSetpoint::pos, HorizontalGuidanceReference::pos, GuidanceHRef::pos, HorizontalGuidance::ref, RotorcraftNavigation::setpoint_mode, HorizontalGuidance::sp, sp_accel, HorizontalGuidanceSetpoint::speed, HorizontalGuidanceReference::speed, GuidanceHRef::speed, SPEED_BFP_OF_REAL, SPEED_FLOAT_OF_BFP, stateGetPositionNed_i(), stateGetSpeedNed_i(), HorizontalGuidance::use_ref, VECT2_COPY, FloatVect2::x, FloatVect3::x, Int32Vect2::x, NedCoor_i::x, FloatVect2::y, FloatVect3::y, Int32Vect2::y, NedCoor_i::y, and HorizontalGuidanceSetpoint::yaw_mask.
Referenced by guidance_h_from_nav(), and guidance_h_guided_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 219 of file guidance_h.c.
References autopilot_in_flight(), foo, guidance_h, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_NAV, HorizontalGuidanceSetpoint::h_mask, INT_VECT2_ZERO, HorizontalGuidance::mode, radio_control, RC_OK, HorizontalGuidance::rc_sp, read_rc_setpoint_heading(), read_rc_setpoint_speed_i(), HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, RadioControl::status, and HorizontalGuidanceRCInput::vect.
Referenced by guidance_h_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 167 of file guidance_h.c.
References FLOAT_ANGLE_NORMALIZE, foo, get_sys_time_float(), GUIDANCE_H_SP_MAX_R, HorizontalGuidanceRCInput::heading, HorizontalGuidanceRCInput::last_ts, MAX_PPRZ, FloatEulers::psi, RADIO_YAW, stateGetNedToBodyEulers_f(), THROTTLE_STICK_DOWN_FROM_RC, and YAW_DEADBAND_EXCEEDED.
Referenced by rc_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
read speed setpoint from RC
Definition at line 189 of file guidance_h.c.
References foo, GUIDANCE_H_REF_MAX_SPEED, INT32_TRIG_FRAC, MAX_PPRZ, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, RADIO_PITCH, RADIO_ROLL, SPEED_BFP_OF_REAL, speed_sp, stateGetNedToBodyEulers_i(), FloatVect3::x, and FloatVect3::y.
Referenced by rc_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 114 of file guidance_h.c.
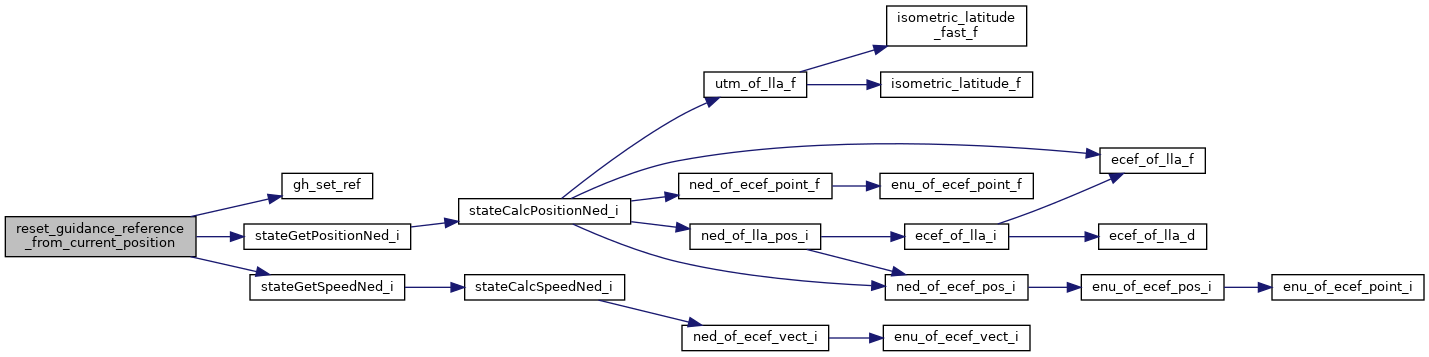
References HorizontalGuidanceReference::accel, FLOAT_VECT2_ZERO, foo, gh_set_ref(), guidance_h, INT_VECT2_ZERO, HorizontalGuidanceReference::pos, HorizontalGuidance::ref, HorizontalGuidanceReference::speed, SPEED_FLOAT_OF_BFP, stateGetPositionNed_i(), stateGetSpeedNed_i(), VECT2_COPY, FloatVect2::x, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_hover_enter(), guidance_h_nav_enter(), guidance_h_set_acc(), guidance_h_set_pos(), and guidance_h_set_vel().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 64 of file guidance_h.c.
References dev, foo, guidance_h, HorizontalGuidanceSetpoint::pos, HorizontalGuidanceReference::pos, HorizontalGuidance::ref, HorizontalGuidance::sp, stateGetPositionNed_i(), Int32Vect2::x, NedCoor_i::x, Int32Vect2::y, and NedCoor_i::y.
Referenced by guidance_h_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 73 of file guidance_h.c.
References HorizontalGuidanceReference::accel, dev, foo, guidance_h, HorizontalGuidanceSetpoint::pos, HorizontalGuidanceReference::pos, HorizontalGuidance::ref, HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, HorizontalGuidanceReference::speed, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_init().
Here is the caller graph for this function:| struct HorizontalGuidance guidance_h |
Definition at line 45 of file guidance_h.c.
Referenced by autopilot_static_periodic(), guidance_h_from_nav(), guidance_h_guided_run(), guidance_h_hover_enter(), guidance_h_init(), guidance_h_mode_changed(), guidance_h_run(), guidance_h_set_acc(), guidance_h_set_all(), guidance_h_set_heading(), guidance_h_set_heading_rate(), guidance_h_set_pos(), guidance_h_set_vel(), guidance_h_update_reference(), guidance_pid_h_run(), guidance_plane_attitude_from_nav(), ins_ekf2_publish_attitude(), orange_avoider_guided_periodic(), rc_cb(), reset_guidance_reference_from_current_position(), rotwing_state_periodic(), send_fp(), send_gh(), send_hover_loop(), send_href(), send_status(), and stabilization_indi_set_wls_settings().
| struct StabilizationSetpoint guidance_h_cmd |
horizontal guidance command.
In north/east with INT32_ANGLE_FRAC
Definition at line 50 of file guidance_h.c.
Referenced by guidance_h_from_nav(), and guidance_h_guided_run().
|
static |
Definition at line 58 of file guidance_h.c.
Referenced by guidance_h_init().