|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Horizontal guidance for rotorcrafts. More...
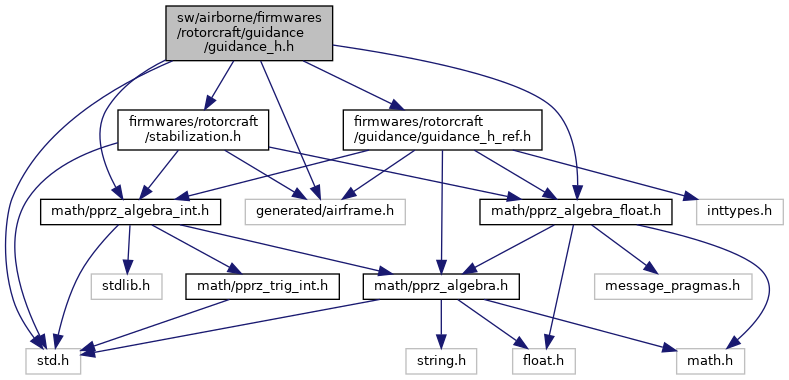
#include "math/pprz_algebra_int.h"#include "math/pprz_algebra_float.h"#include "firmwares/rotorcraft/guidance/guidance_h_ref.h"#include "firmwares/rotorcraft/stabilization.h"#include "generated/airframe.h"#include "std.h" Include dependency graph for guidance_h.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for guidance_h.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | HorizontalGuidanceSetpoint |
| struct | HorizontalGuidanceReference |
| struct | HorizontalGuidanceRCInput |
| struct | HorizontalGuidance |
Macros | |
| #define | GUIDANCE_H_USE_REF TRUE |
| Use horizontal guidance reference trajectory. | |
| #define | GUIDANCE_H_USE_SPEED_REF TRUE |
| Use horizontal guidance speed reference. | |
| #define | GUIDANCE_H_MODE_NONE 0 |
| #define | GUIDANCE_H_MODE_HOVER 1 |
| #define | GUIDANCE_H_MODE_NAV 2 |
| #define | GUIDANCE_H_MODE_GUIDED 3 |
| #define | GUIDANCE_H_MAX_BANK RadOfDeg(20) |
| Max bank controlled by guidance. | |
| #define | guidance_h_SetUseRef(_val) |
Variables | |
| struct HorizontalGuidance | guidance_h |
Horizontal guidance for rotorcrafts.
Definition in file guidance_h.h.
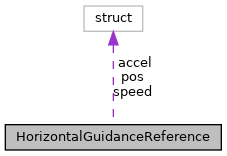
| struct HorizontalGuidanceReference |
Definition at line 92 of file guidance_h.h.
Collaboration diagram for HorizontalGuidanceReference:| Data Fields | ||
|---|---|---|
| struct Int32Vect2 | accel | with INT32_ACCEL_FRAC |
| struct Int32Vect2 | pos | with INT32_POS_FRAC |
| struct Int32Vect2 | speed | with INT32_SPEED_FRAC |
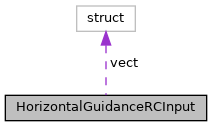
| struct HorizontalGuidanceRCInput |
Definition at line 98 of file guidance_h.h.
Collaboration diagram for HorizontalGuidanceRCInput:| Data Fields | ||
|---|---|---|
| float | heading | |
| float | last_ts | |
| struct Int32Vect2 | vect | |
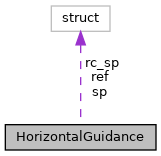
| struct HorizontalGuidance |
Definition at line 104 of file guidance_h.h.
Collaboration diagram for HorizontalGuidance:| Data Fields | ||
|---|---|---|
| uint8_t | mode | |
| struct HorizontalGuidanceRCInput | rc_sp | remote control setpoint |
| struct HorizontalGuidanceReference | ref | reference calculated from setpoints |
| struct HorizontalGuidanceSetpoint | sp | setpoints |
| bool | use_ref | |
Max bank controlled by guidance.
Definition at line 64 of file guidance_h.h.
| #define GUIDANCE_H_MODE_GUIDED 3 |
Definition at line 59 of file guidance_h.h.
| #define GUIDANCE_H_MODE_HOVER 1 |
Definition at line 57 of file guidance_h.h.
| #define GUIDANCE_H_MODE_NAV 2 |
Definition at line 58 of file guidance_h.h.
| #define GUIDANCE_H_MODE_NONE 0 |
Definition at line 56 of file guidance_h.h.
Definition at line 188 of file guidance_h.h.
Use horizontal guidance reference trajectory.
Default is TRUE, define to FALSE to always disable it.
Definition at line 45 of file guidance_h.h.
Use horizontal guidance speed reference.
This also allows to give velocity commands via RC in GUIDANCE_H_MODE_HOVER. Default is TRUE, define to FALSE to always disable it.
Definition at line 53 of file guidance_h.h.
|
extern |
Set horizontal guidance from NAV and run control loop.
Definition at line 391 of file guidance_h.c.
References RotorcraftNavigation::accel, RotorcraftNavigation::carrot, foo, RotorcraftNavigation::fp_max_speed, guidance_h, guidance_h_cmd, guidance_h_guided_run(), guidance_h_nav_enter(), guidance_h_run_accel(), guidance_h_run_pos(), guidance_h_run_speed(), guidance_h_set_acc(), guidance_h_set_heading(), guidance_h_set_pos(), guidance_h_set_vel(), guidance_h_SetMaxSpeed(), guidance_h_update_reference(), RotorcraftNavigation::heading, RotorcraftNavigation::horizontal_mode, nav, NAV_HORIZONTAL_MODE_ATTITUDE, NAV_HORIZONTAL_MODE_GUIDED, NAV_HORIZONTAL_MODE_NONE, NAV_SETPOINT_MODE_ACCEL, NAV_SETPOINT_MODE_POS, NAV_SETPOINT_MODE_QUAT, NAV_SETPOINT_MODE_SPEED, FloatEulers::phi, RotorcraftNavigation::pitch, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, RotorcraftNavigation::quat, RotorcraftNavigation::roll, RotorcraftNavigation::setpoint_mode, HorizontalGuidance::sp, StabilizationSetpoint::sp, RotorcraftNavigation::speed, stab_sp_from_eulers_f(), stab_sp_from_quat_f(), STAB_SP_SET_EULERS_ZERO, Int32Vect2::x, EnuCoor_f::x, Int32Vect2::y, and EnuCoor_f::y.
Referenced by guidance_h_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Run GUIDED mode control.
Definition at line 457 of file guidance_h.c.
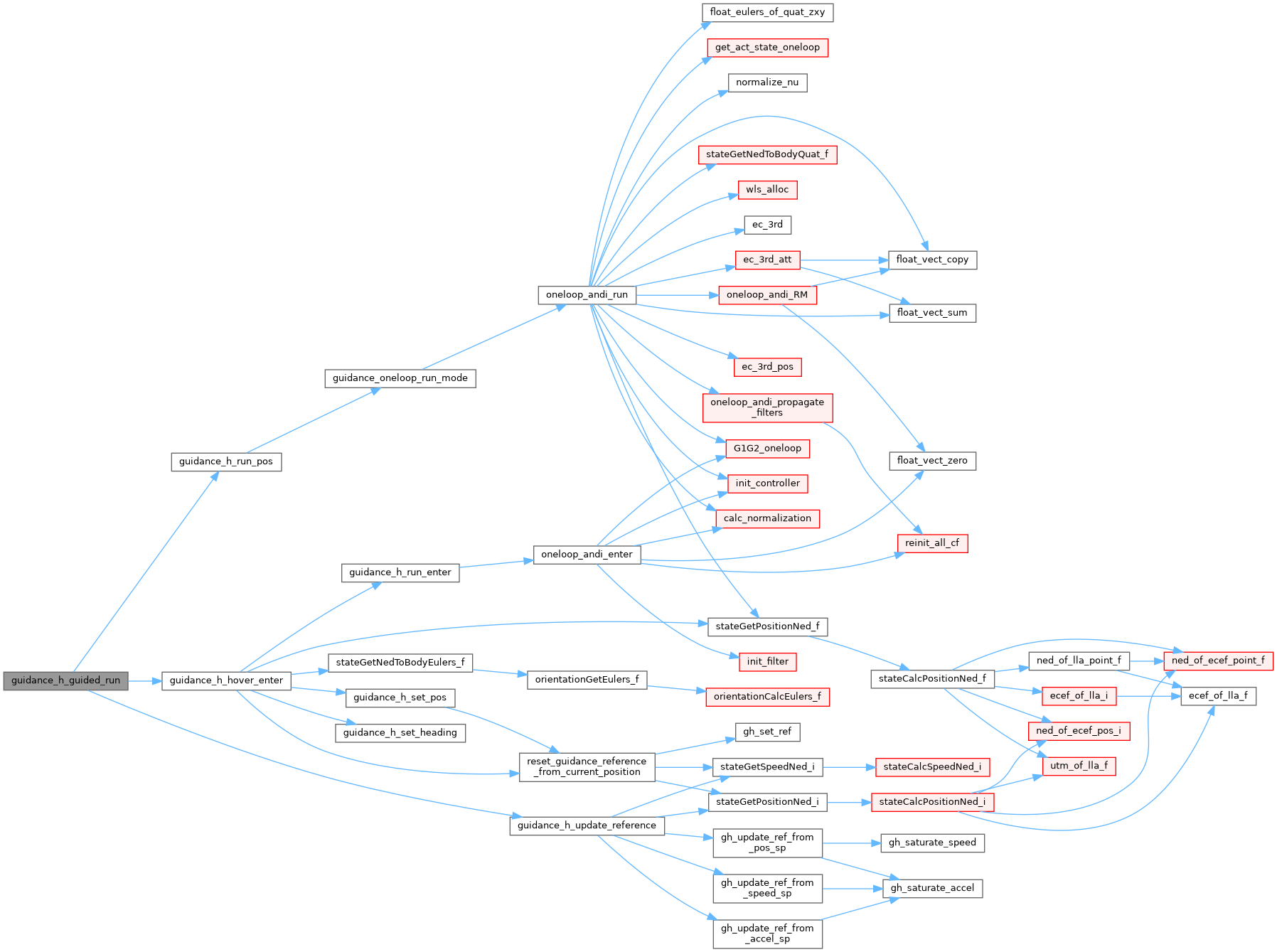
References guidance_h, guidance_h_cmd, guidance_h_hover_enter(), guidance_h_run_pos(), guidance_h_run_speed(), guidance_h_update_reference(), HorizontalGuidanceSetpoint::h_mask, and HorizontalGuidance::sp.
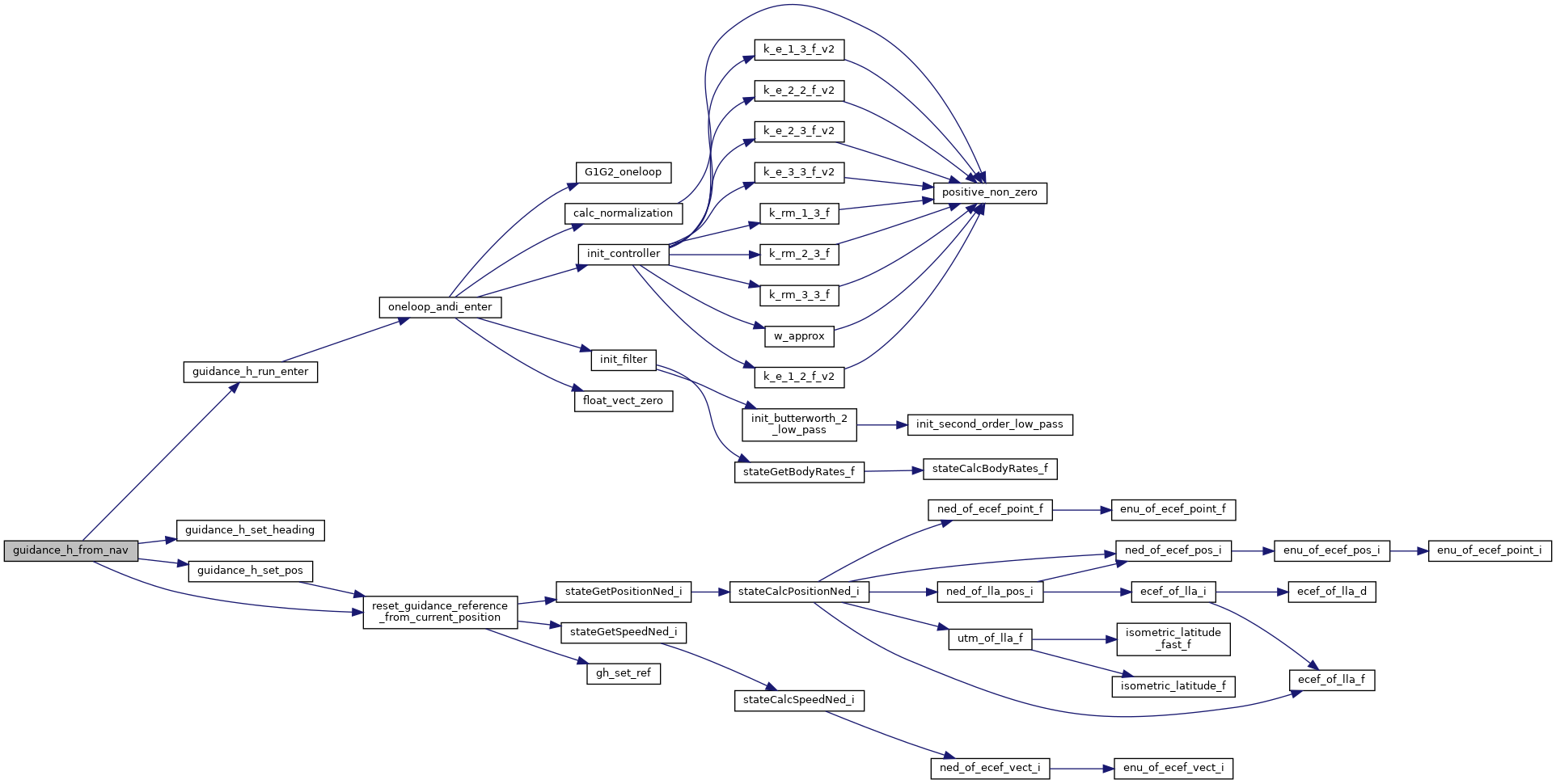
Referenced by guidance_h_from_nav(), and guidance_h_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 359 of file guidance_h.c.
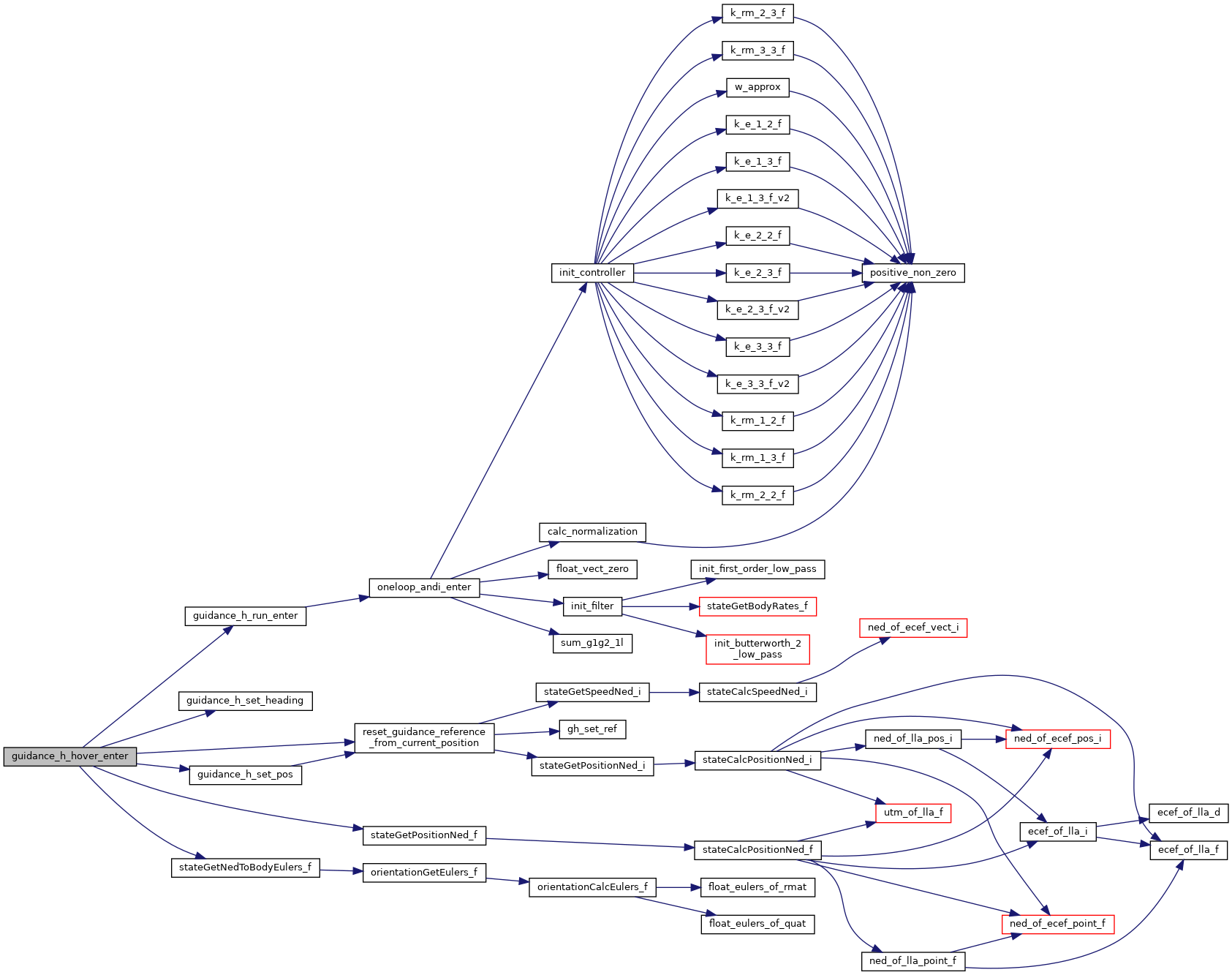
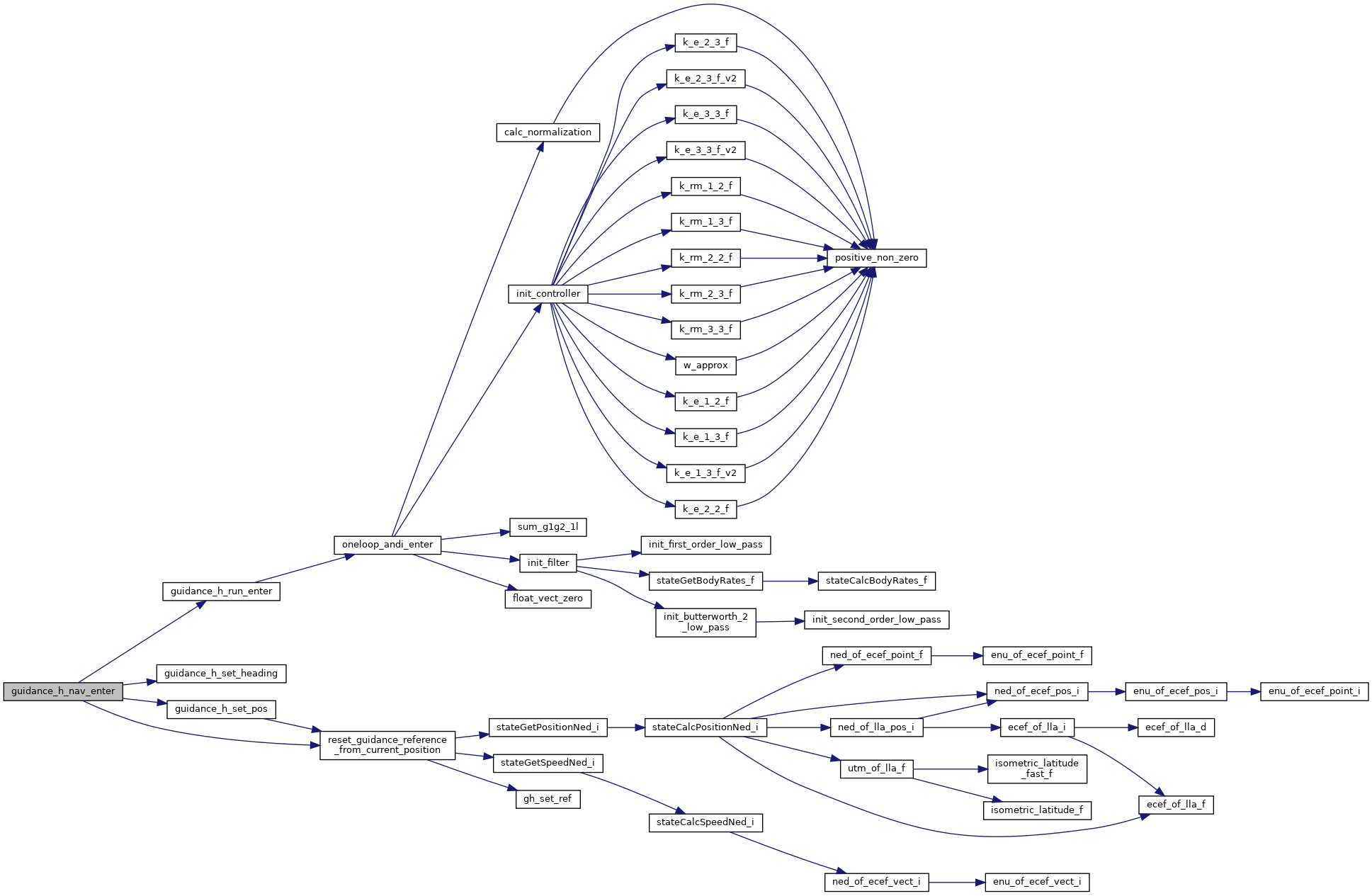
References guidance_h, guidance_h_run_enter(), guidance_h_set_heading(), guidance_h_set_pos(), HorizontalGuidanceRCInput::heading, FloatEulers::psi, HorizontalGuidance::rc_sp, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, stateGetNedToBodyEulers_f(), stateGetPositionNed_f(), FloatVect2::x, Int32Vect2::x, FloatVect2::y, and Int32Vect2::y.
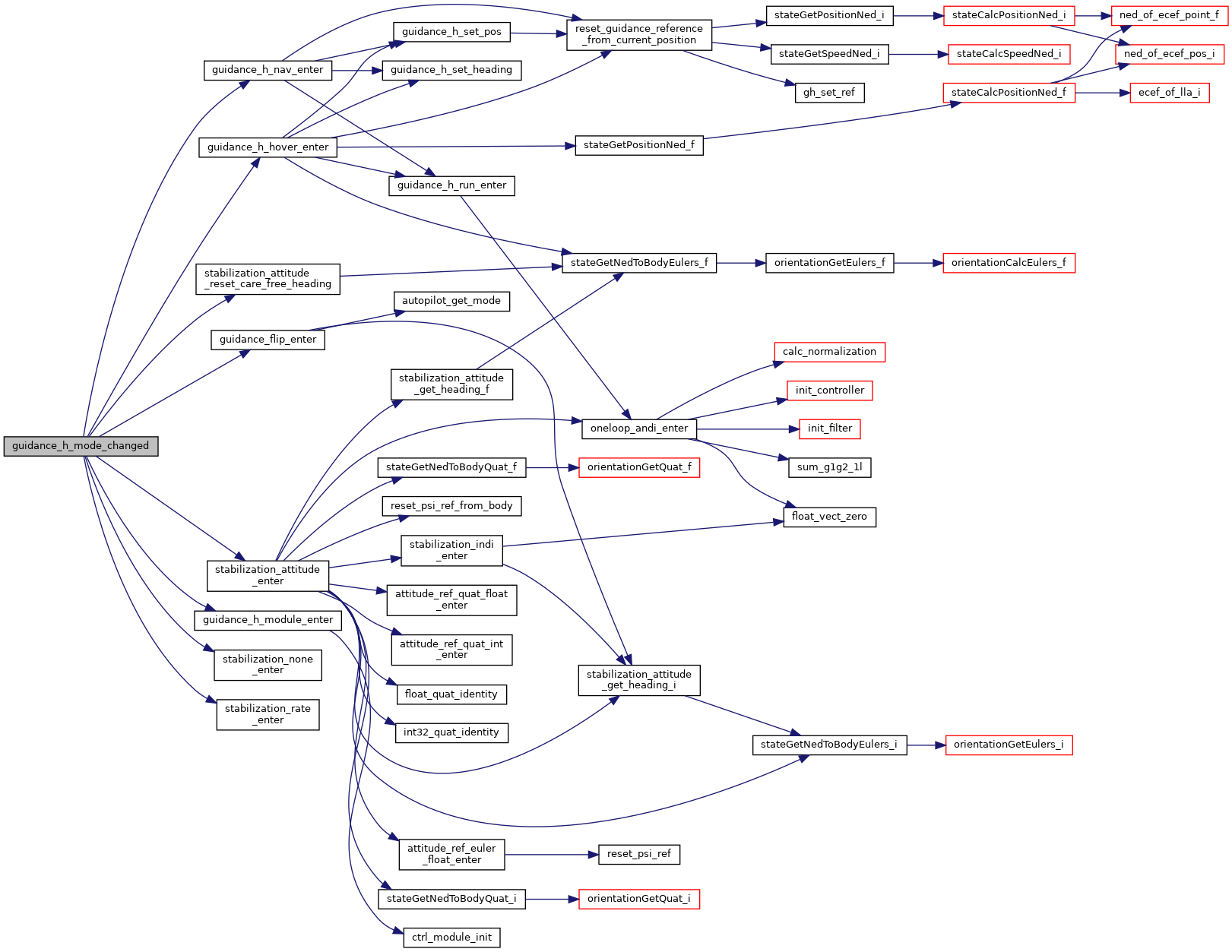
Referenced by guidance_h_guided_run(), guidance_h_mode_changed(), and wedgebug_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 86 of file guidance_h.c.
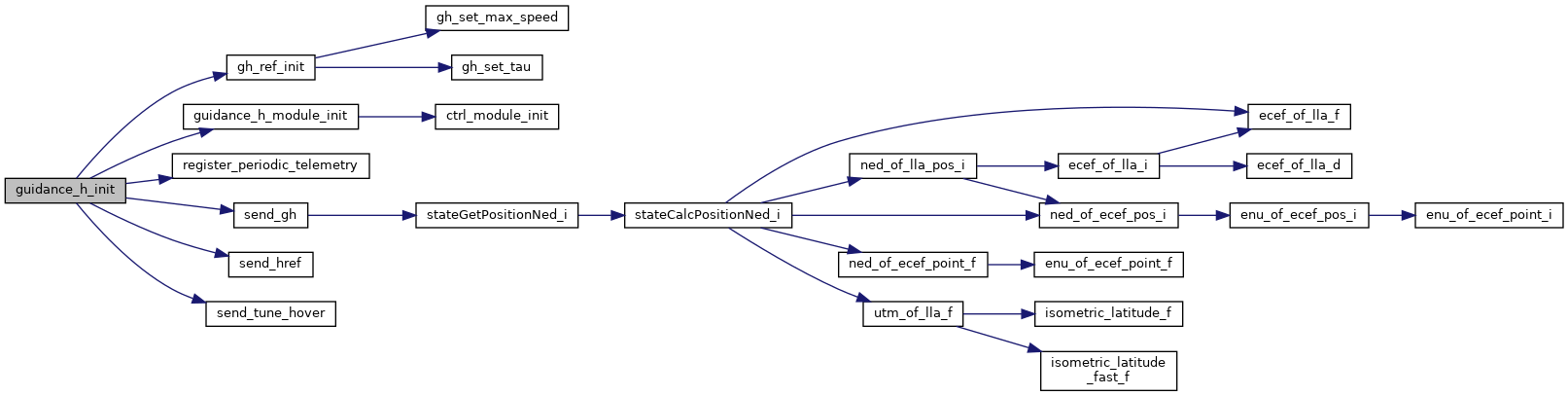
References DefaultPeriodic, foo, gh_ref_init(), guidance_h, GUIDANCE_H_MODE_NONE, GUIDANCE_H_RC_ID, GUIDANCE_H_USE_REF, HorizontalGuidanceSetpoint::h_mask, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceRCInput::heading, HorizontalGuidanceSetpoint::heading_rate, INT_VECT2_ZERO, HorizontalGuidanceRCInput::last_ts, HorizontalGuidance::mode, HorizontalGuidanceSetpoint::pos, rc_cb(), rc_ev, HorizontalGuidance::rc_sp, register_periodic_telemetry(), send_gh(), send_href(), HorizontalGuidance::sp, HorizontalGuidance::use_ref, HorizontalGuidanceRCInput::vect, and HorizontalGuidanceSetpoint::yaw_mask.
Here is the call graph for this function:Definition at line 128 of file guidance_h.c.
References foo, guidance_h, guidance_h_hover_enter(), GUIDANCE_H_MODE_GUIDED, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_NAV, guidance_h_nav_enter(), and HorizontalGuidance::mode.
Referenced by autopilot_static_set_mode(), control_mixing_heewing_attitude_direct_enter(), control_mixing_heewing_attitude_plane_enter(), control_mixing_heewing_nav_enter(), and guidance_module_enter().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 380 of file guidance_h.c.
References RotorcraftNavigation::carrot, guidance_h_run_enter(), guidance_h_set_heading(), guidance_h_set_pos(), RotorcraftNavigation::heading, nav, reset_guidance_reference_from_current_position(), EnuCoor_f::x, and EnuCoor_f::y.
Referenced by guidance_h_from_nav(), and guidance_h_mode_changed().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 244 of file guidance_h.c.
References guidance_h, guidance_h_from_nav(), guidance_h_guided_run(), GUIDANCE_H_MODE_GUIDED, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_NAV, HorizontalGuidanceSetpoint::heading, HorizontalGuidanceRCInput::heading, HorizontalGuidance::mode, HorizontalGuidance::rc_sp, HorizontalGuidance::sp, StabilizationSetpoint::sp, and STAB_SP_SET_EULERS_ZERO.
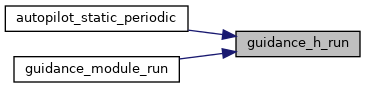
Referenced by autopilot_static_periodic(), control_mixing_heewing_nav_run(), and guidance_module_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 58 of file guidance_oneloop.c.
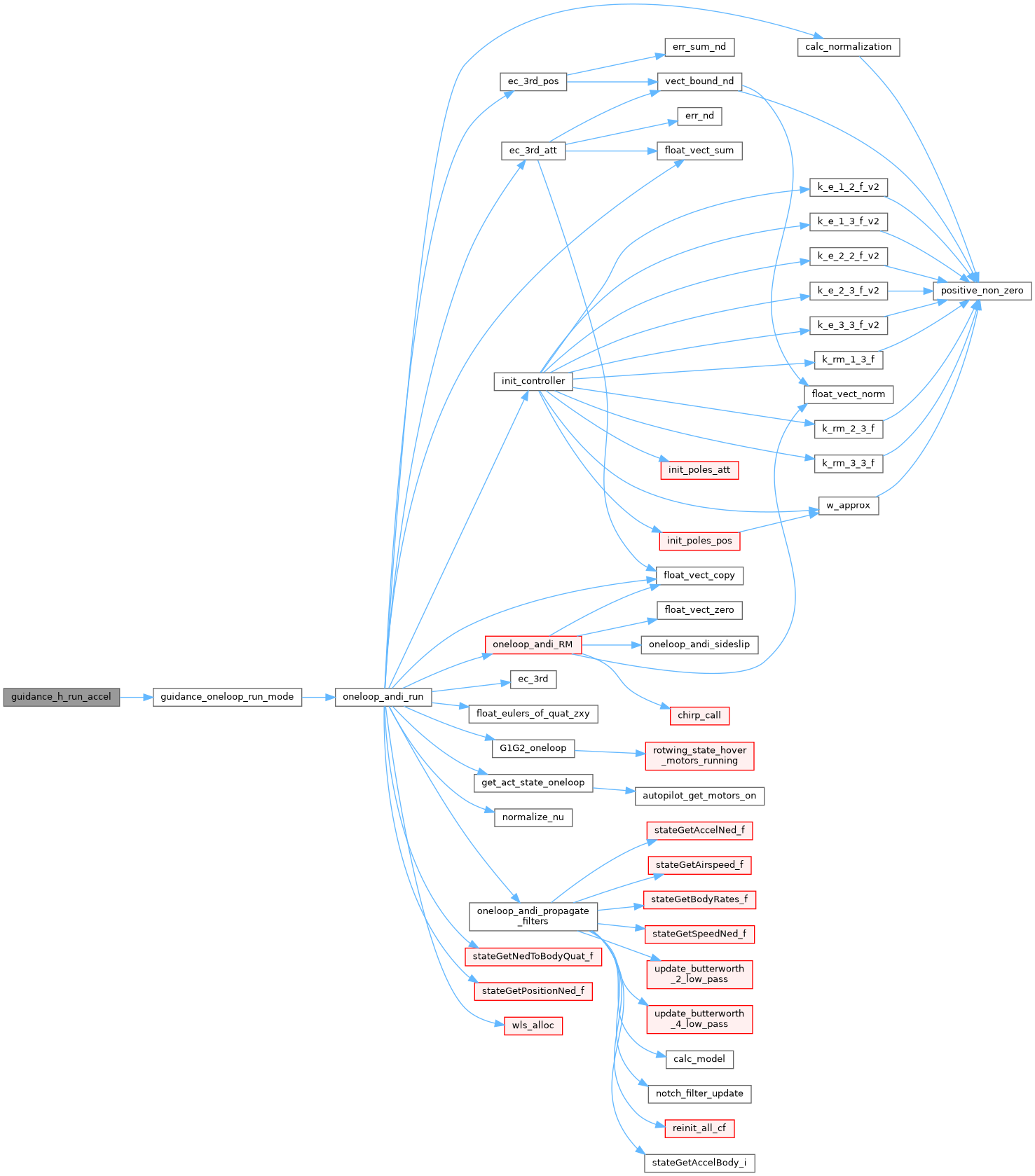
References _gv, _v_mode, foo, GUIDANCE_ONELOOP_H_ACCEL, and guidance_oneloop_run_mode().
Referenced by guidance_h_from_nav().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 35 of file guidance_oneloop.c.
References CTRL_ANDI, and oneloop_andi_enter().
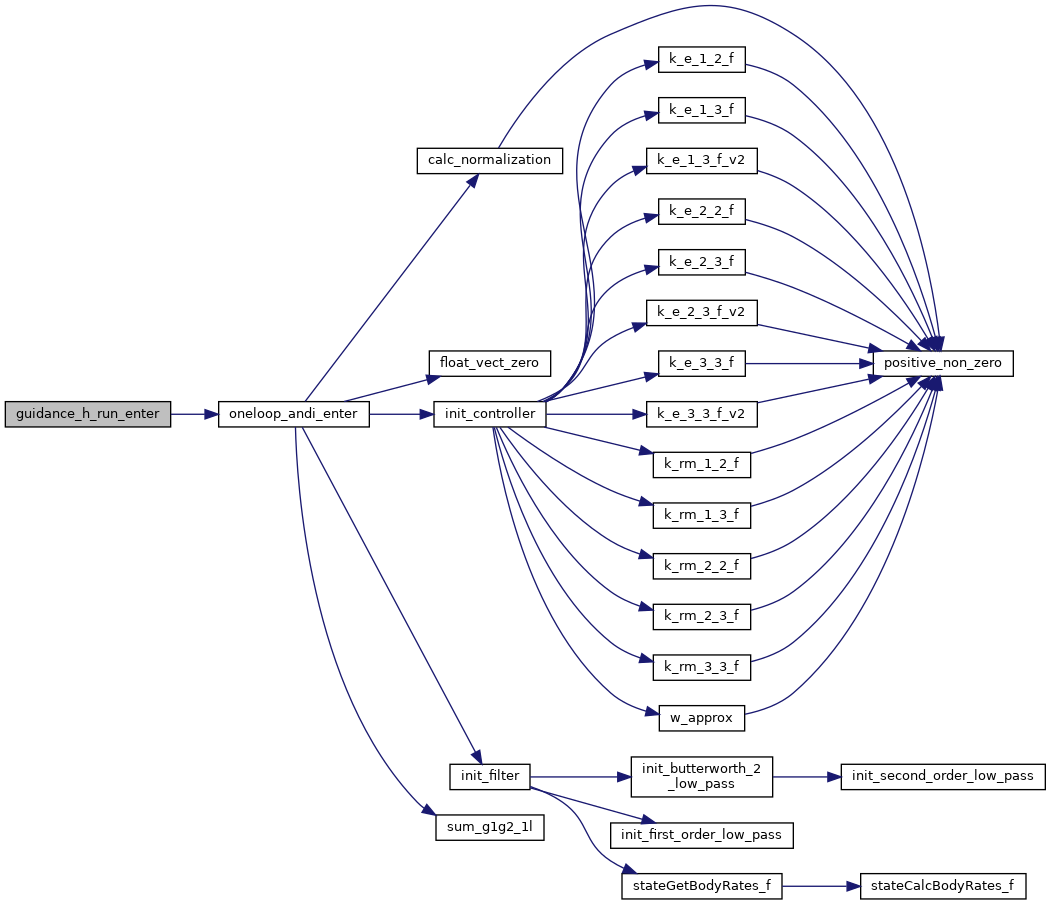
Referenced by guidance_h_hover_enter(), and guidance_h_nav_enter().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 48 of file guidance_oneloop.c.
References _gv, _v_mode, foo, GUIDANCE_ONELOOP_H_POS, and guidance_oneloop_run_mode().
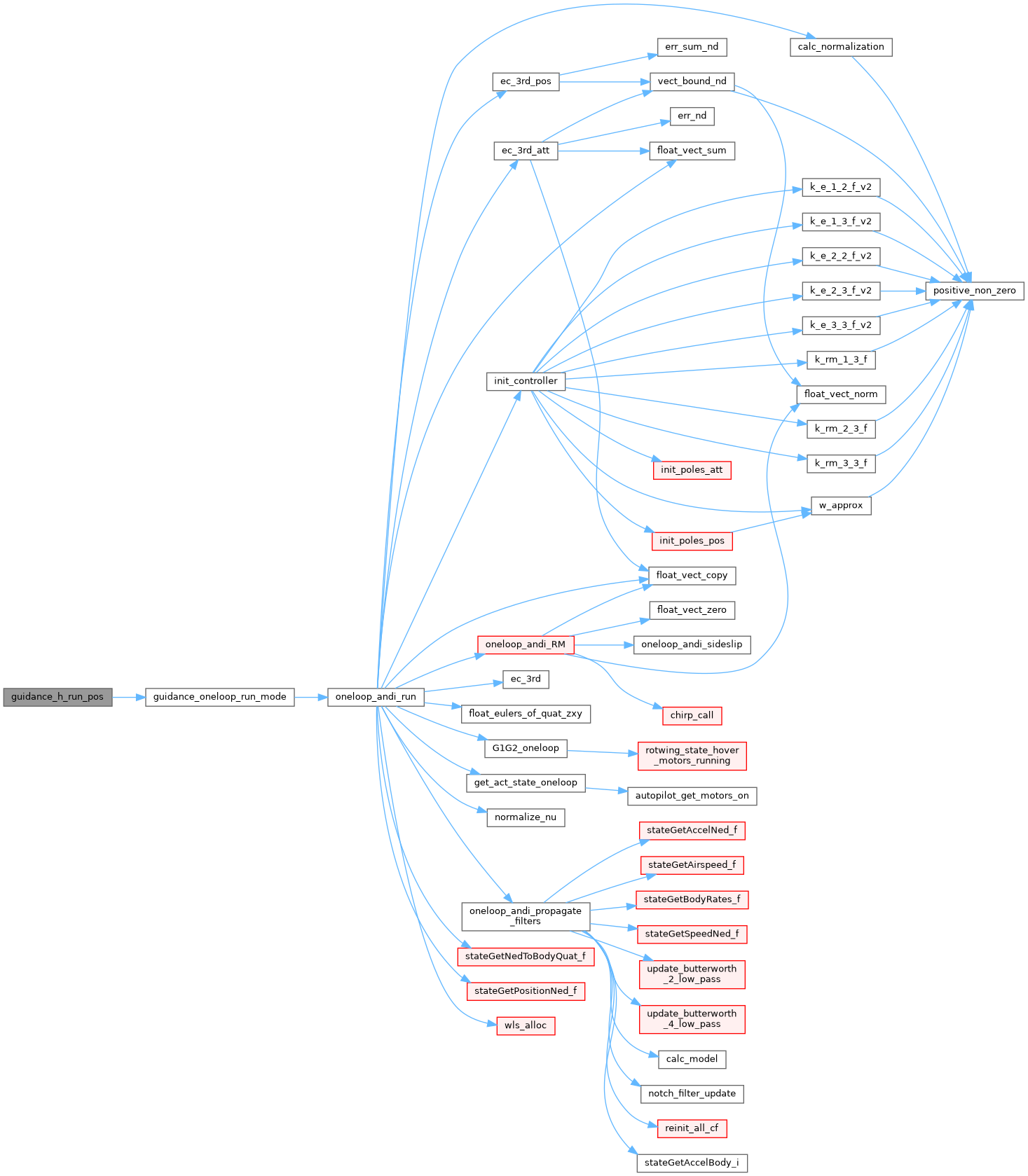
Referenced by guidance_h_from_nav(), and guidance_h_guided_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 53 of file guidance_oneloop.c.
References _gv, _v_mode, foo, GUIDANCE_ONELOOP_H_SPEED, and guidance_oneloop_run_mode().
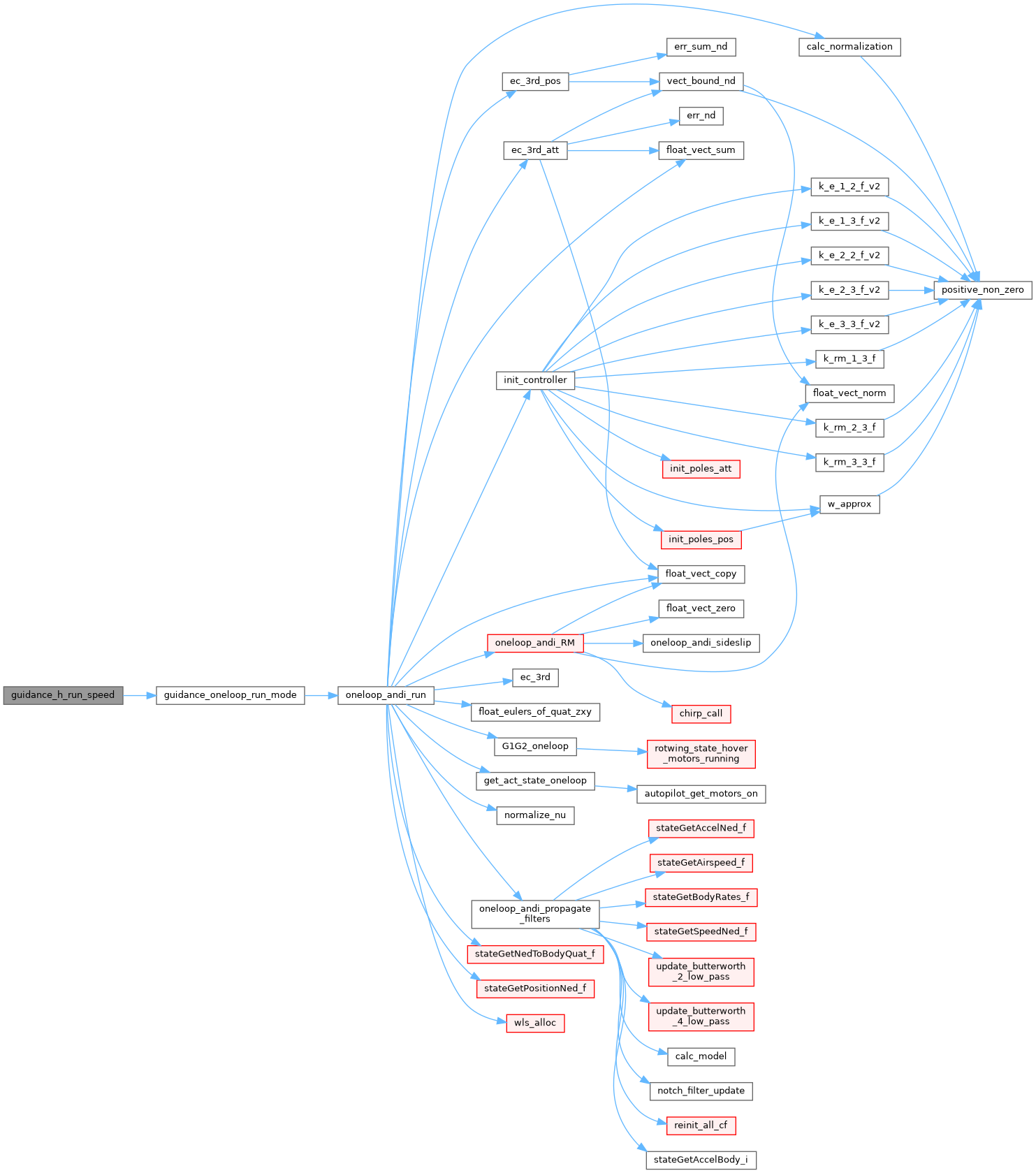
Referenced by guidance_h_from_nav(), and guidance_h_guided_run().
Here is the call graph for this function: Here is the caller graph for this function:Set horizontal acceleration setpoint.
| ax | North acceleration (local NED frame) in meters/sec². |
| ay | East acceleration (local NED frame) in meters/sec². |
Definition at line 520 of file guidance_h.c.
References HorizontalGuidanceSetpoint::accel, ACCEL_BFP_OF_REAL, guidance_h, HorizontalGuidanceSetpoint::h_mask, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_from_nav(), and guidance_h_set_body_acc().
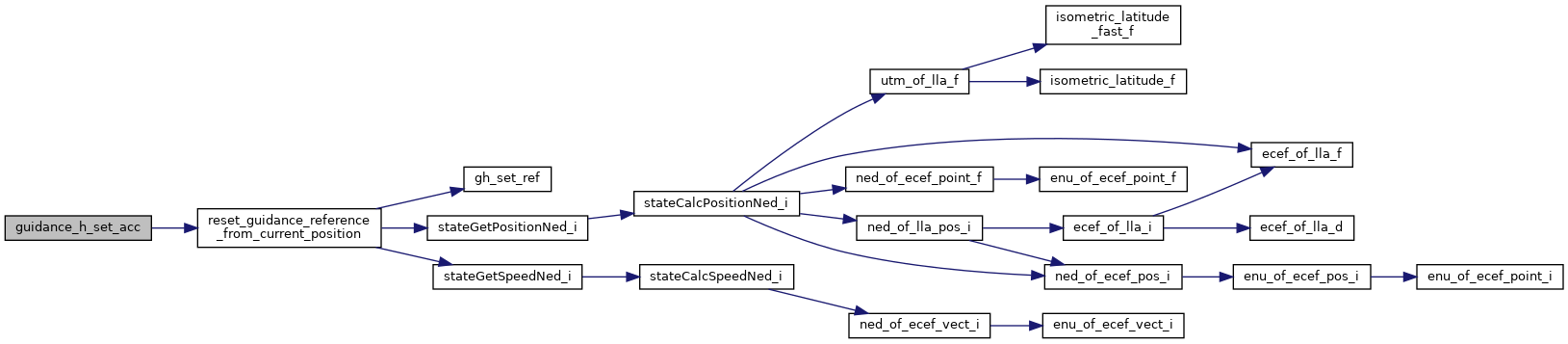
Here is the call graph for this function: Here is the caller graph for this function:Set position speed and acceleration (NED frame).
| x | North position (local NED frame) in meters. |
| y | East position (local NED frame) in meters. |
| vx | North velocity (local NED frame) in meters/sec. |
| vy | East velocity (local NED frame) in meters/sec. |
| ax | North acceleration (local NED frame) in meters/sec². |
| ay | East acceleration (local NED frame) in meters/sec². |
Definition at line 536 of file guidance_h.c.
References HorizontalGuidanceSetpoint::accel, ACCEL_BFP_OF_REAL, guidance_h, HorizontalGuidanceSetpoint::h_mask, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, SPEED_BFP_OF_REAL, Int32Vect2::x, and Int32Vect2::y.
Set body relative horizontal acceleration setpoint.
| ax | forward acceleration (body frame) in meters/sec². |
| ay | right acceleration (body frame) in meters/sec². |
Definition at line 512 of file guidance_h.c.
References foo, guidance_h_set_acc(), FloatEulers::psi, and stateGetNedToBodyEulers_f().
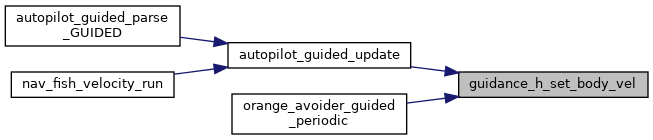
Here is the call graph for this function:Set body relative horizontal velocity setpoint.
| vx | forward velocity (body frame) in meters/sec. |
| vy | right velocity (body frame) in meters/sec. |
Definition at line 494 of file guidance_h.c.
References foo, guidance_h_set_vel(), FloatEulers::psi, and stateGetNedToBodyEulers_f().
Referenced by orange_avoider_guided_periodic().
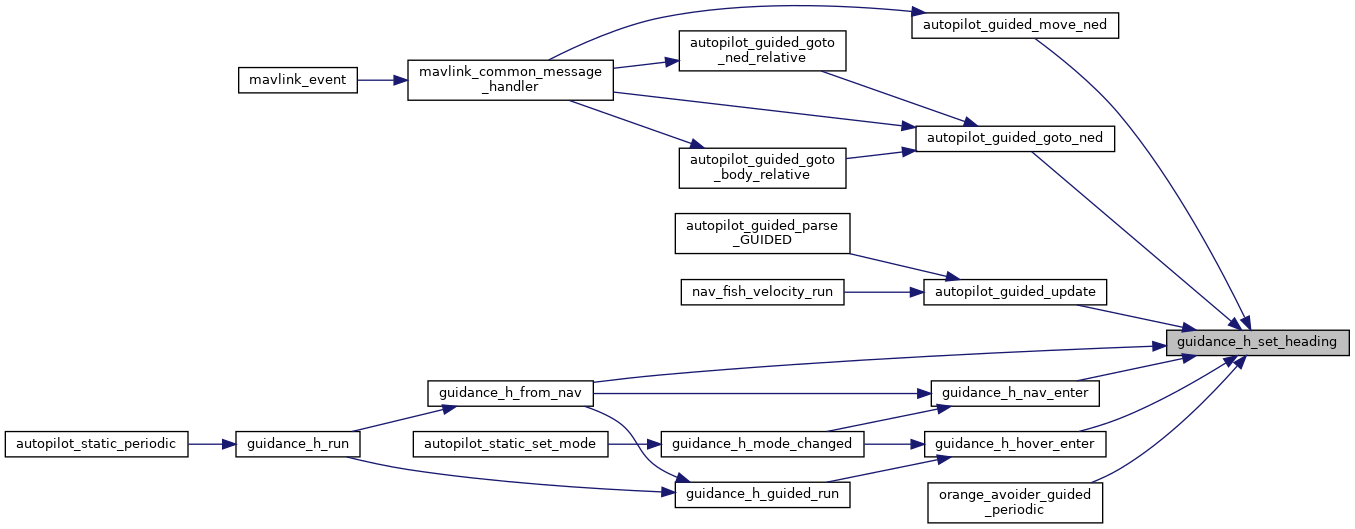
Here is the call graph for this function: Here is the caller graph for this function:Set heading setpoint.
| heading | Setpoint in radians. |
Definition at line 487 of file guidance_h.c.
References FLOAT_ANGLE_NORMALIZE, guidance_h, HorizontalGuidanceSetpoint::heading, heading, HorizontalGuidance::sp, and HorizontalGuidanceSetpoint::yaw_mask.
Referenced by guidance_h_from_nav(), guidance_h_hover_enter(), guidance_h_nav_enter(), orange_avoider_guided_periodic(), and wedgebug_periodic().
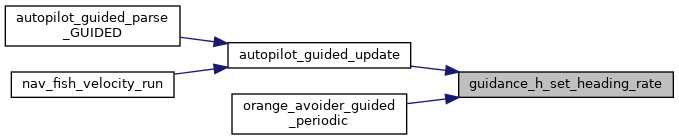
Here is the caller graph for this function:Set heading rate setpoint.
| rate | Heading rate in radians. |
Definition at line 530 of file guidance_h.c.
References guidance_h, HorizontalGuidanceSetpoint::heading_rate, HorizontalGuidance::sp, and HorizontalGuidanceSetpoint::yaw_mask.
Referenced by orange_avoider_guided_periodic().
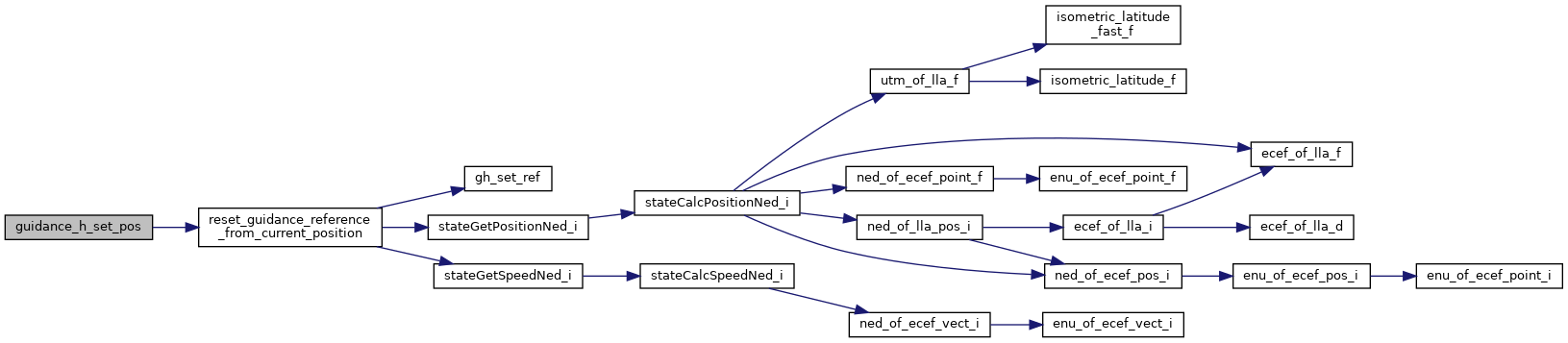
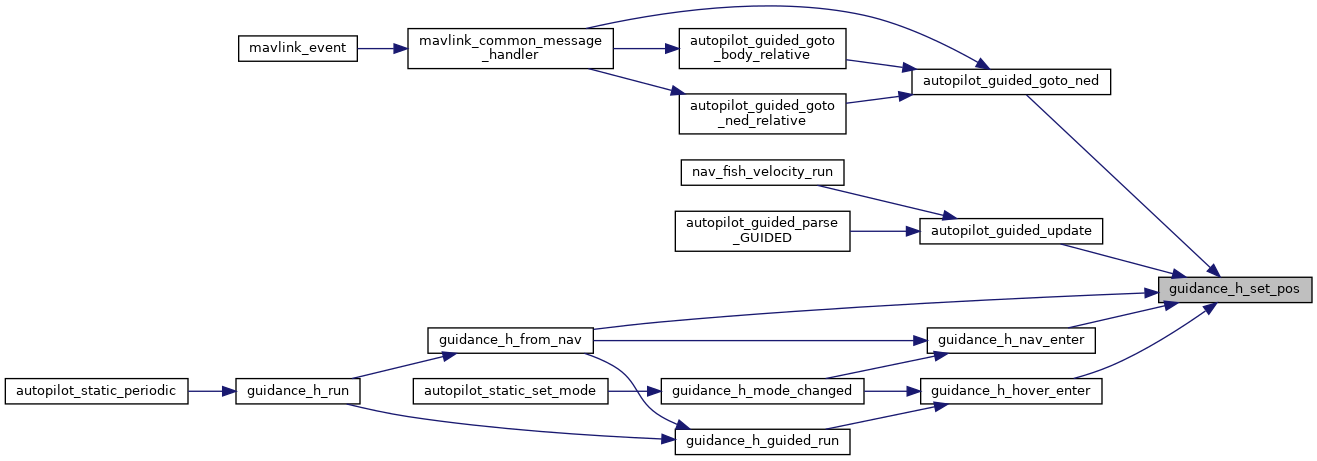
Here is the caller graph for this function:Set horizontal position setpoint.
| x | North position (local NED frame) in meters. |
| y | East position (local NED frame) in meters. |
Definition at line 477 of file guidance_h.c.
References guidance_h, HorizontalGuidanceSetpoint::h_mask, HorizontalGuidanceSetpoint::pos, POS_BFP_OF_REAL, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_from_nav(), guidance_h_hover_enter(), guidance_h_nav_enter(), and wedgebug_periodic().
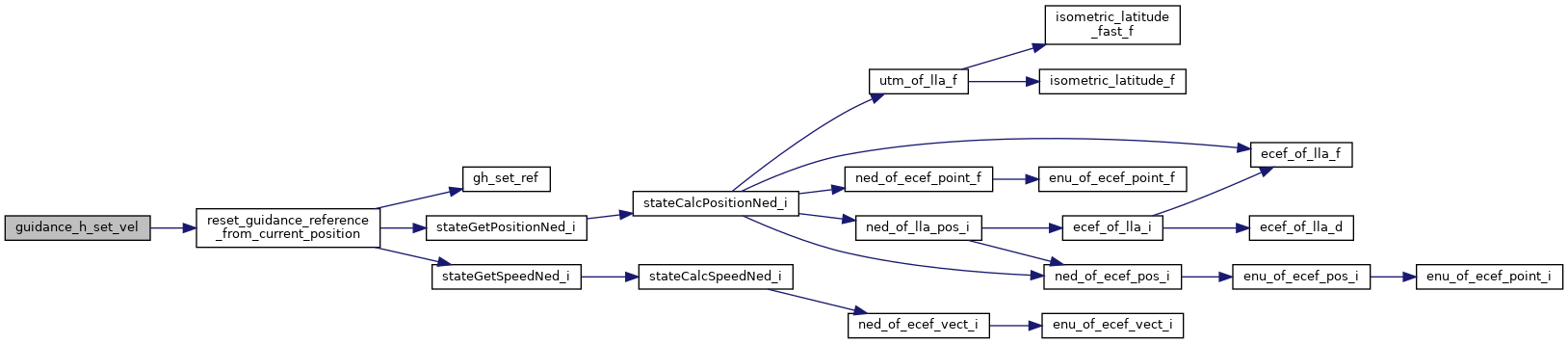
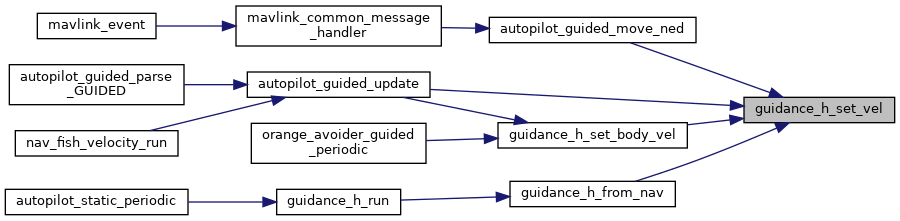
Here is the call graph for this function: Here is the caller graph for this function:Set horizontal velocity setpoint.
| vx | North velocity (local NED frame) in meters/sec. |
| vy | East velocity (local NED frame) in meters/sec. |
Definition at line 502 of file guidance_h.c.
References guidance_h, HorizontalGuidanceSetpoint::h_mask, reset_guidance_reference_from_current_position(), HorizontalGuidance::sp, HorizontalGuidanceSetpoint::speed, SPEED_BFP_OF_REAL, Int32Vect2::x, and Int32Vect2::y.
Referenced by guidance_h_from_nav(), and guidance_h_set_body_vel().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 192 of file guidance_h.h.
References gh_set_max_speed().
Referenced by guidance_h_from_nav().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 197 of file guidance_h.h.
References gh_set_omega().
Here is the call graph for this function:Definition at line 207 of file guidance_h.h.
References gh_set_tau().
Here is the call graph for this function:Definition at line 202 of file guidance_h.h.
References gh_set_zeta().
Here is the call graph for this function:
|
extern |
Definition at line 45 of file guidance_h.c.
Referenced by autopilot_static_periodic(), guidance_h_from_nav(), guidance_h_guided_run(), guidance_h_hover_enter(), guidance_h_init(), guidance_h_mode_changed(), guidance_h_run(), guidance_h_set_acc(), guidance_h_set_all(), guidance_h_set_heading(), guidance_h_set_heading_rate(), guidance_h_set_pos(), guidance_h_set_vel(), guidance_h_update_reference(), guidance_pid_h_run(), guidance_plane_attitude_from_nav(), ins_ekf2_publish_attitude(), orange_avoider_guided_periodic(), rc_cb(), reset_guidance_reference_from_current_position(), rotwing_state_periodic(), send_fp(), send_gh(), send_hover_loop(), send_href(), send_status(), and stabilization_indi_set_wls_settings().