|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
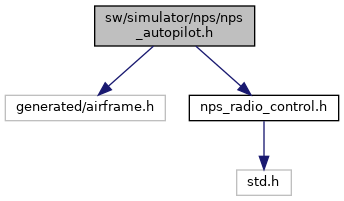
 Include dependency graph for nps_autopilot.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nps_autopilot.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | NpsAutopilot |
Macros | |
| #define | NPS_COMMANDS_NB ACTUATORS_NB |
| Number of commands sent to the FDM of NPS. | |
Functions | |
| void | sim_overwrite_ahrs (void) |
| void | sim_overwrite_ins (void) |
| void | nps_autopilot_init (enum NpsRadioControlType type, int num_script, char *js_dev) |
| void | nps_autopilot_run_step (double time) |
| void | nps_autopilot_run_systime_step (void) |
Variables | |
| struct NpsAutopilot | nps_autopilot |
| ifndef NPS_NO_MOTOR_MIXING include "modules/actuators/motor_mixing.h" | |
| bool | nps_bypass_ahrs |
| bool | nps_bypass_ins |
| struct NpsAutopilot |
Definition at line 48 of file nps_autopilot.h.
| Data Fields | ||
|---|---|---|
| double | commands[NPS_COMMANDS_NB] | |
| bool | launch | |
| #define NPS_COMMANDS_NB ACTUATORS_NB |
Number of commands sent to the FDM of NPS.
If MOTOR_MIXING_NB_MOTOR is defined (usually rotorcraft firmware) we have that many commands (one per motor), otherwise we default to the number of high level commands (COMMANDS_NB).
Definition at line 44 of file nps_autopilot.h.
|
extern |
Definition at line 69 of file nps_autopilot_fixedwing.c.
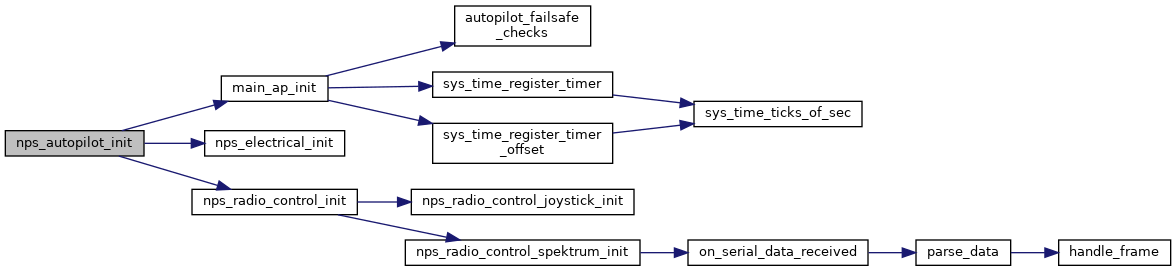
References FALSE, foo, NpsAutopilot::launch, main_ap_init(), nps_autopilot, nps_bypass_ahrs, NPS_BYPASS_AHRS, nps_bypass_ins, NPS_BYPASS_INS, nps_electrical_init(), nps_radio_control_init(), and TRUE.
Referenced by nps_radio_and_autopilot_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 95 of file nps_autopilot_fixedwing.c.
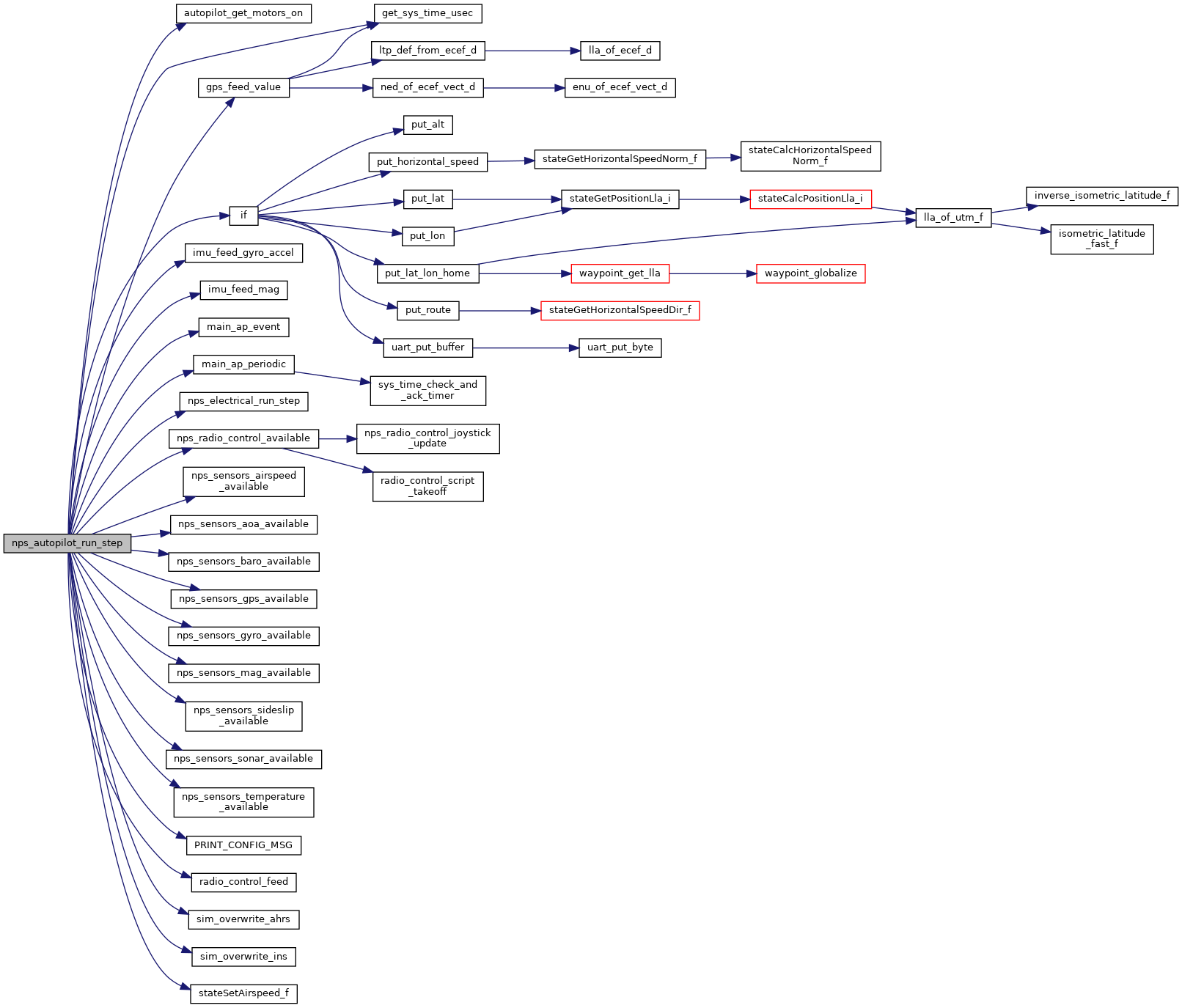
References AGL_SONAR_NPS_ID, AIRSPEED_NPS_ID, autopilot, autopilot_get_motors_on(), BARO_SIM_SENDER_ID, commands, MotorMixing::commands, NpsAutopilot::commands, DefaultChannel, DefaultDevice, foo, get_sys_time_usec(), gps_feed_value(), imu_feed_gyro_accel(), imu_feed_mag(), INCIDENCE_NPS_ID, pprz_autopilot::kill_throttle, pprz_autopilot::launch, NpsAutopilot::launch, main_ap_event(), main_ap_periodic(), MAX_PPRZ, motor_mixing, nps_autopilot, nps_bypass_ahrs, nps_bypass_ins, NPS_COMMANDS_NB, nps_electrical_run_step(), nps_radio_control_available(), nps_sensors_airspeed_available(), nps_sensors_aoa_available(), nps_sensors_baro_available(), nps_sensors_gps_available(), nps_sensors_gyro_available(), nps_sensors_mag_available(), nps_sensors_sideslip_available(), nps_sensors_sonar_available(), nps_sensors_temperature_available(), PRINT_CONFIG_MSG(), PRINT_CONFIG_VAR(), radio_control_feed(), sensors, sim_overwrite_ahrs(), sim_overwrite_ins(), stateSetAirspeed_f(), and time.
Referenced by nps_main_run_sim_step().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 87 of file nps_autopilot_fixedwing.c.
References sys_tick_handler().
Referenced by nps_main_run_sim_step().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 234 of file nps_autopilot_fixedwing.c.
References NpsFdm::body_ecef_rotvel, fdm, foo, NpsFdm::ltp_to_body_quat, QUAT_COPY, RATES_COPY, STATE_INPUT_ATTITUDE, stateSetBodyRates_f(), stateSetInputFilter(), and stateSetNedToBodyQuat_f().
Referenced by nps_autopilot_run_step().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 247 of file nps_autopilot_fixedwing.c.
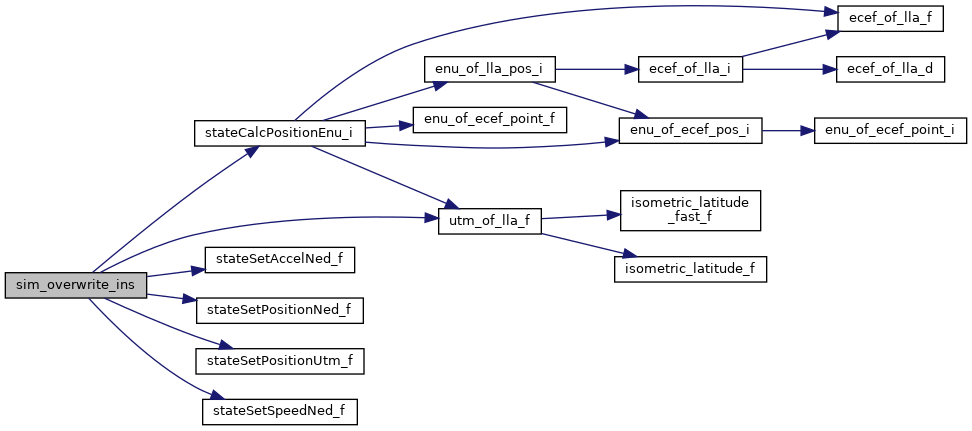
References fdm, foo, LLA_COPY, NpsFdm::lla_pos, LlaCoor_f::lon, NpsFdm::ltpprz_ecef_accel, NpsFdm::ltpprz_ecef_vel, NpsFdm::ltpprz_pos, State::ned_initialized_f, State::ned_initialized_i, state, stateCalcPositionEnu_i(), stateSetAccelNed_f(), stateSetPositionNed_f(), stateSetPositionUtm_f(), stateSetSpeedNed_f(), State::utm_initialized_f, utm_of_lla_f(), VECT3_COPY, and UtmCoor_f::zone.
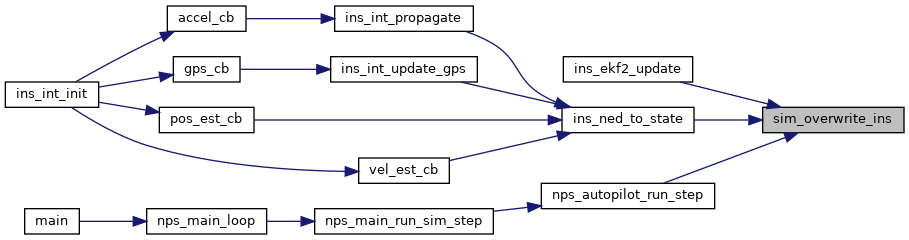
Referenced by ins_ekf2_update(), ins_ned_to_state(), ins_ned_to_state(), and nps_autopilot_run_step().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
ifndef NPS_NO_MOTOR_MIXING include "modules/actuators/motor_mixing.h"
if NPS_COMMANDS_NB != MOTOR_MIXING_NB_MOTOR warning "NPS_COMMANDS_NB does not match MOTOR_MIXING_NB_MOTOR!" endif endif
Definition at line 52 of file nps_autopilot_fixedwing.c.
Referenced by nps_ap_data_loop(), nps_autopilot_init(), nps_autopilot_init(), nps_autopilot_run_step(), nps_main_run_sim_step(), and nps_update_launch_from_dl().
|
extern |
Definition at line 53 of file nps_autopilot_fixedwing.c.
Referenced by nps_autopilot_init(), nps_autopilot_init(), and nps_autopilot_run_step().
|
extern |
Definition at line 54 of file nps_autopilot_fixedwing.c.
Referenced by ins_ekf2_update(), ins_ned_to_state(), ins_ned_to_state(), nps_autopilot_init(), nps_autopilot_init(), and nps_autopilot_run_step().