|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
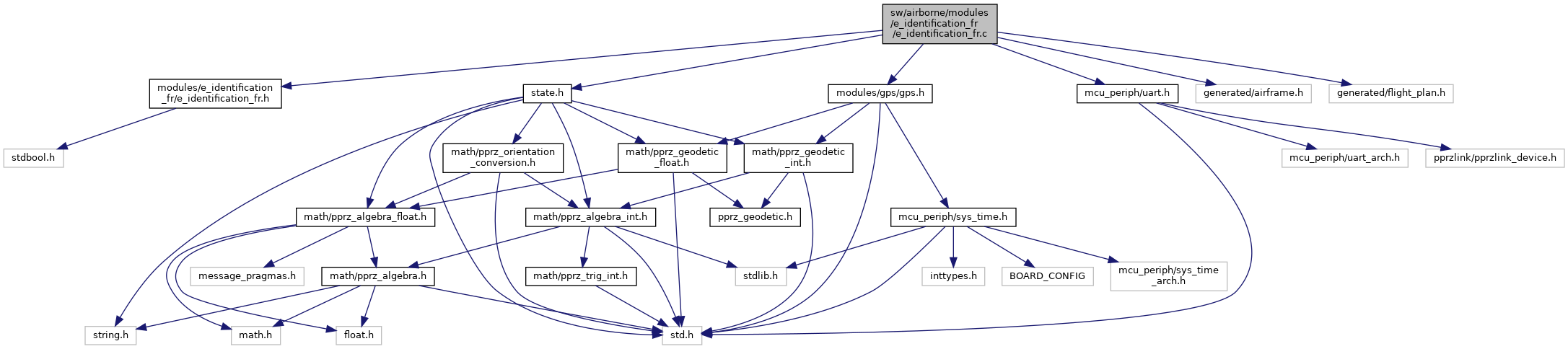
#include "modules/e_identification_fr/e_identification_fr.h"#include "state.h"#include "mcu_periph/uart.h"#include "modules/gps/gps.h"#include "generated/airframe.h"#include "generated/flight_plan.h" Include dependency graph for e_identification_fr.c:
Include dependency graph for e_identification_fr.c:Go to the source code of this file.
Macros | |
| #define | MAX_BUF_LEN 50 |
Functions | |
| static int | put_lat (uint8_t *buf) |
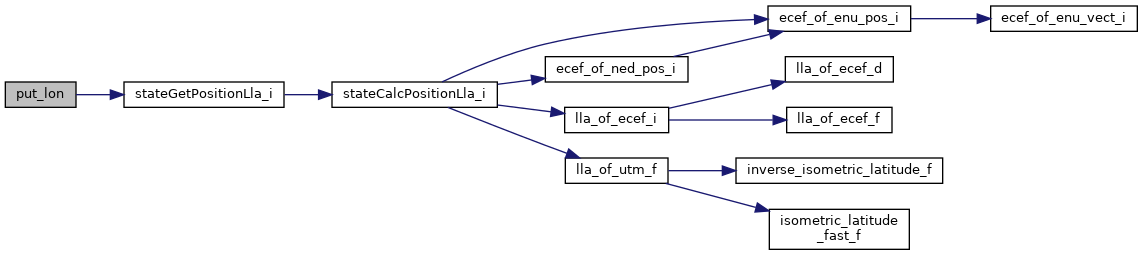
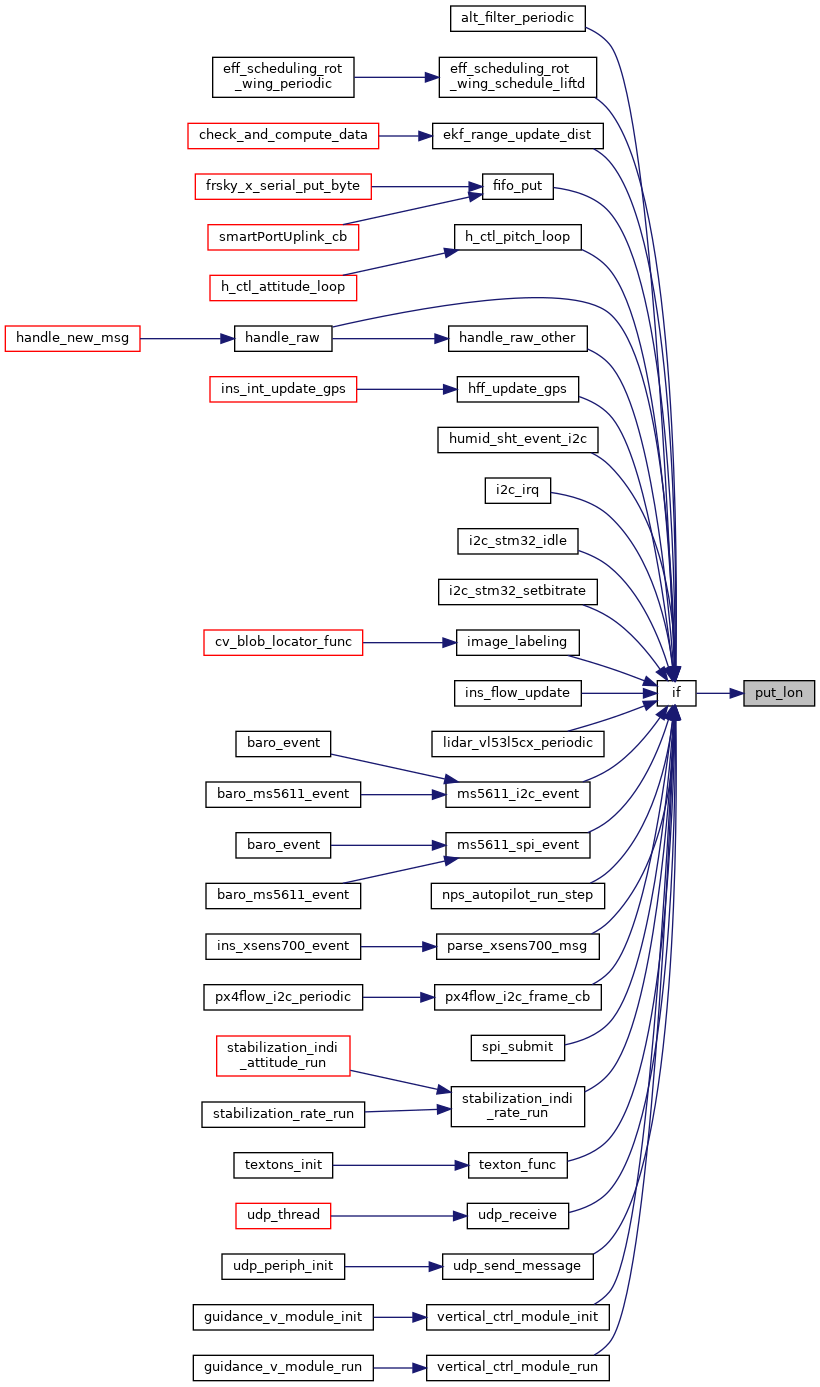
| static int | put_lon (uint8_t *buf) |
| static int | put_alt (uint8_t *buf) |
| static int | put_horizontal_speed (uint8_t *buf) |
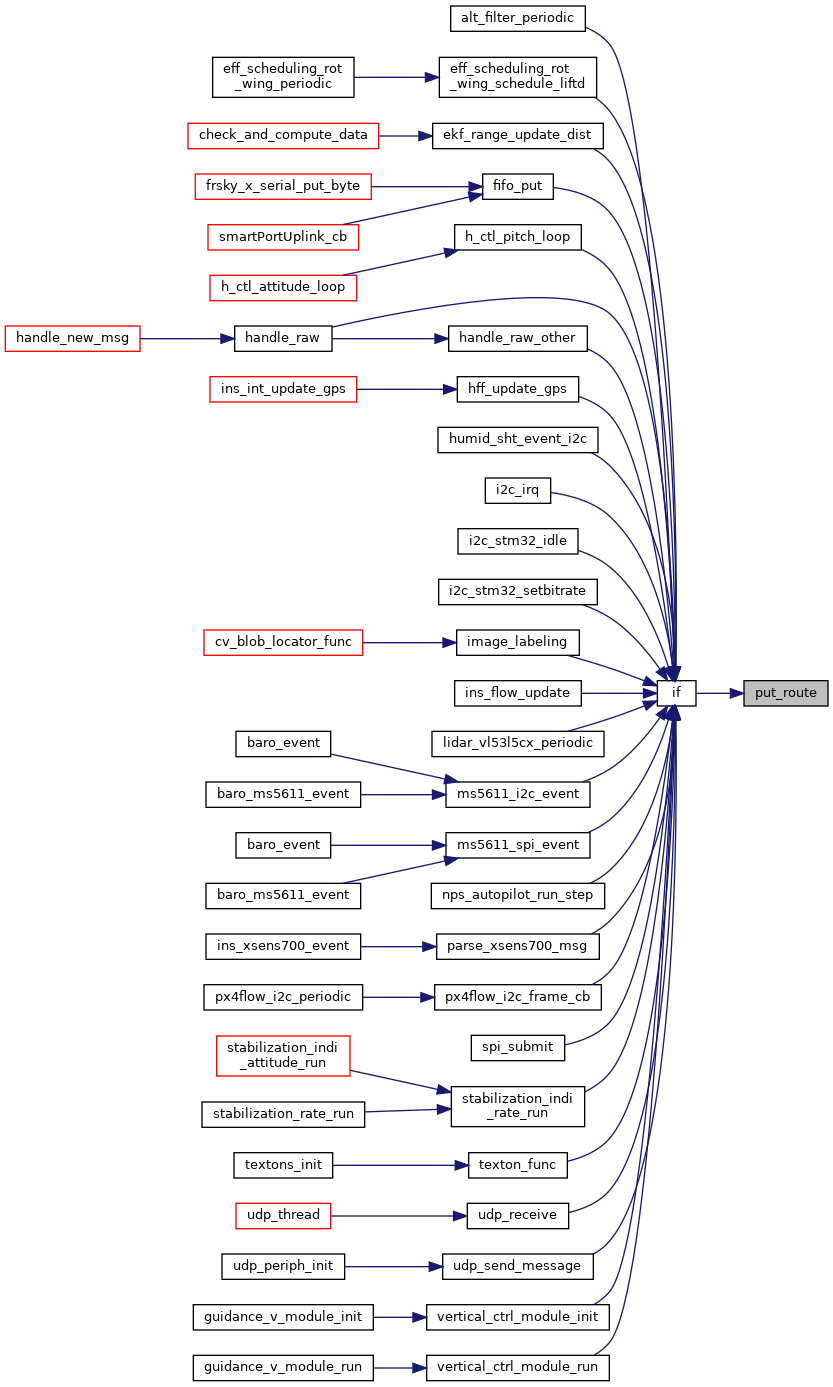
| static int | put_route (uint8_t *buf) |
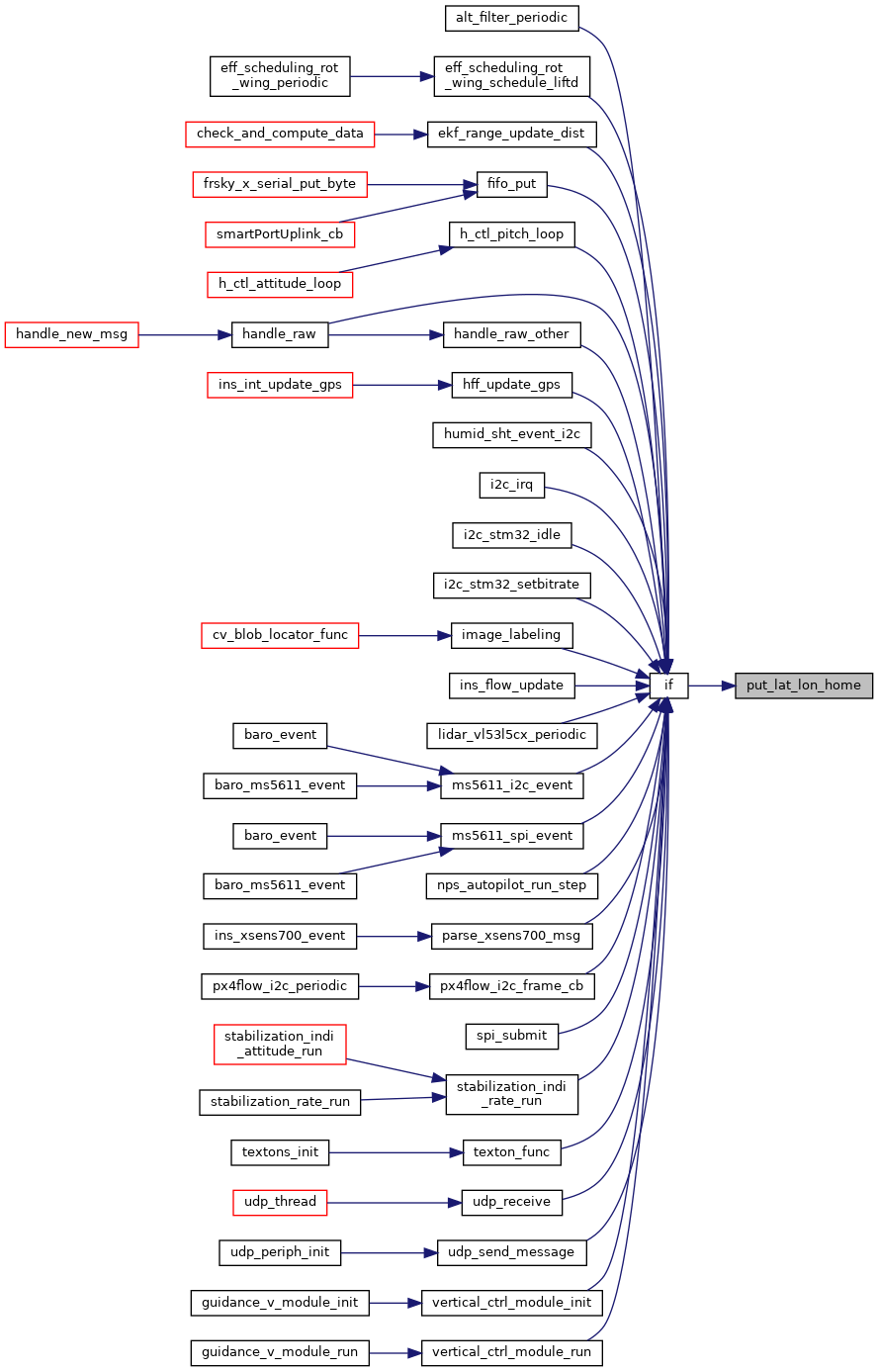
| static int | put_lat_lon_home (uint8_t *buf) |
| void | e_identification_fr_init () |
| void | e_identification_fr_periodic () |
| if (GpsFixValid() &&e_identification_started) | |
Variables | |
| static struct uart_periph * | dev = &(E_ID_DEV) |
| bool | e_identification_started = false |
Definition in file e_identification_fr.c.
| #define MAX_BUF_LEN 50 |
Definition at line 37 of file e_identification_fr.c.
Definition at line 142 of file e_identification_fr.c.
Definition at line 147 of file e_identification_fr.c.
References autopilot, autopilot_in_flight(), e_identification_started, and pprz_autopilot::launch.
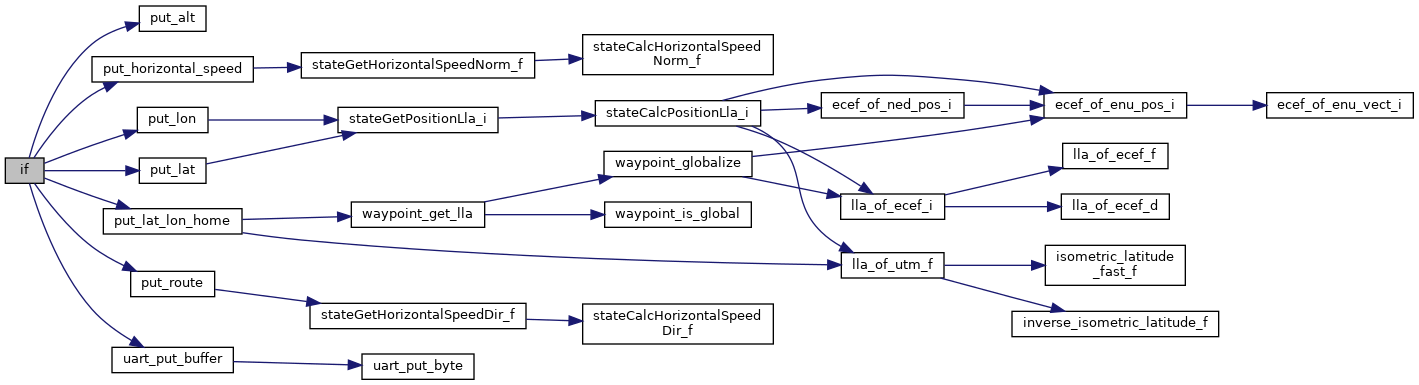
Here is the call graph for this function:| if | ( | GpsFixValid() && | e_identification_started | ) |
Definition at line 159 of file e_identification_fr.c.
References ck_a, ck_b, dev, MAX_BUF_LEN, offset, put_alt(), put_horizontal_speed(), put_lat(), put_lat_lon_home(), put_lon(), put_route(), and uart_put_buffer().
Referenced by airspeed_consistency_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 64 of file e_identification_fr.c.
References E_ID_HMSL, foo, gps, and GpsState::hmsl.
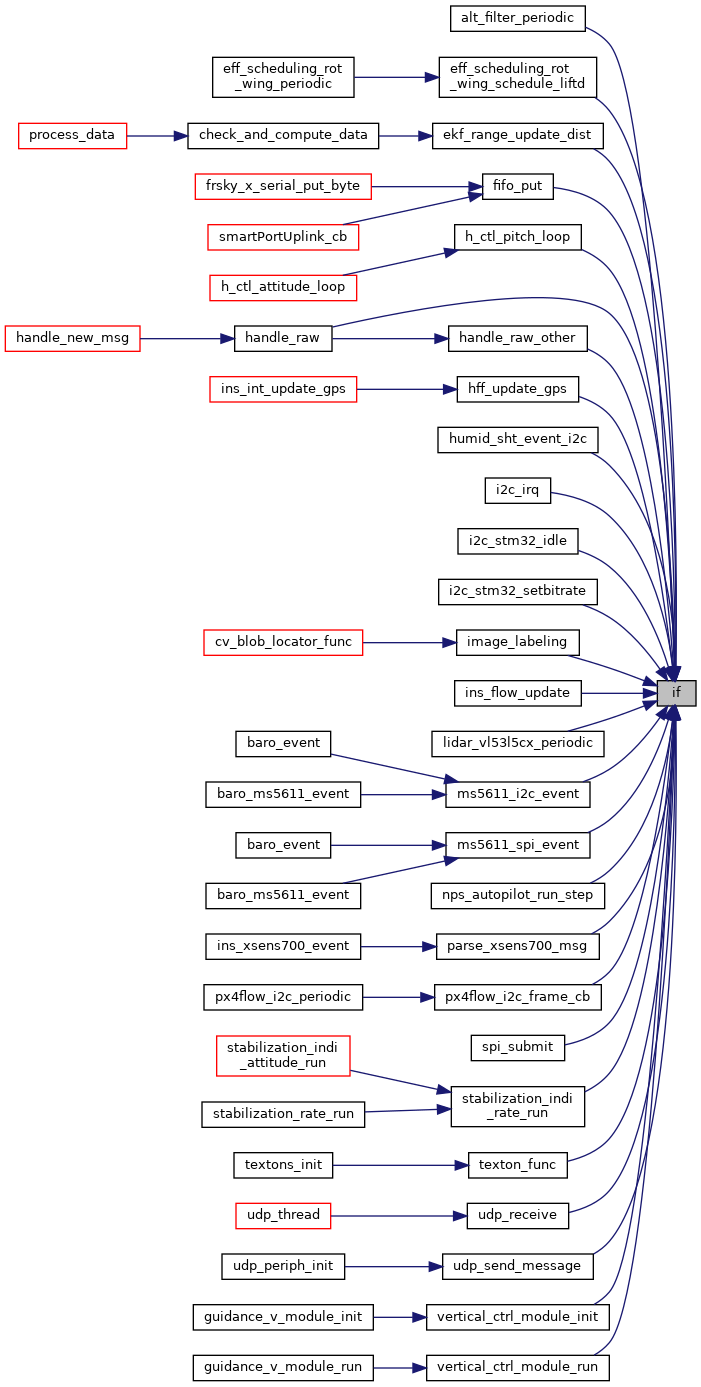
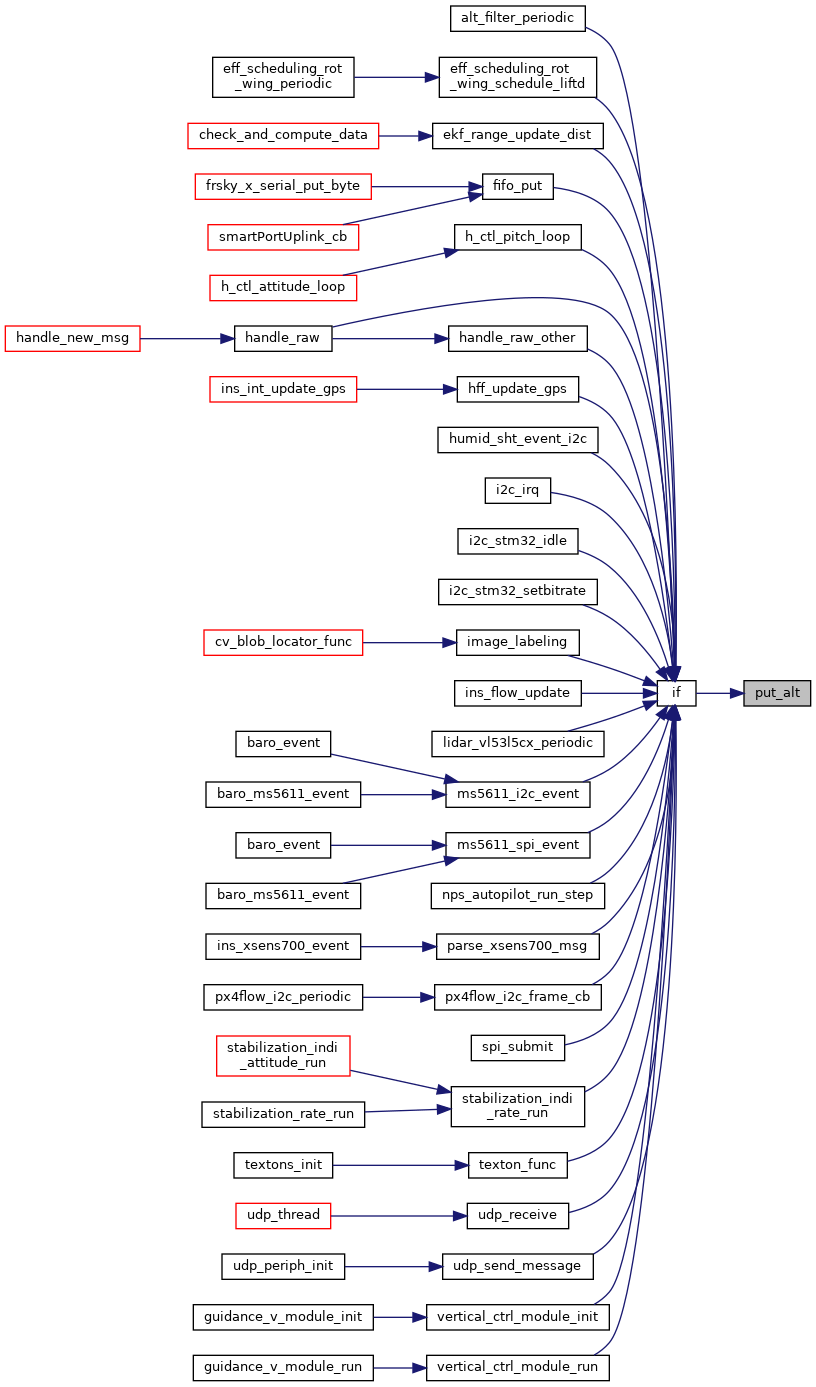
Referenced by if().
Here is the caller graph for this function:Definition at line 74 of file e_identification_fr.c.
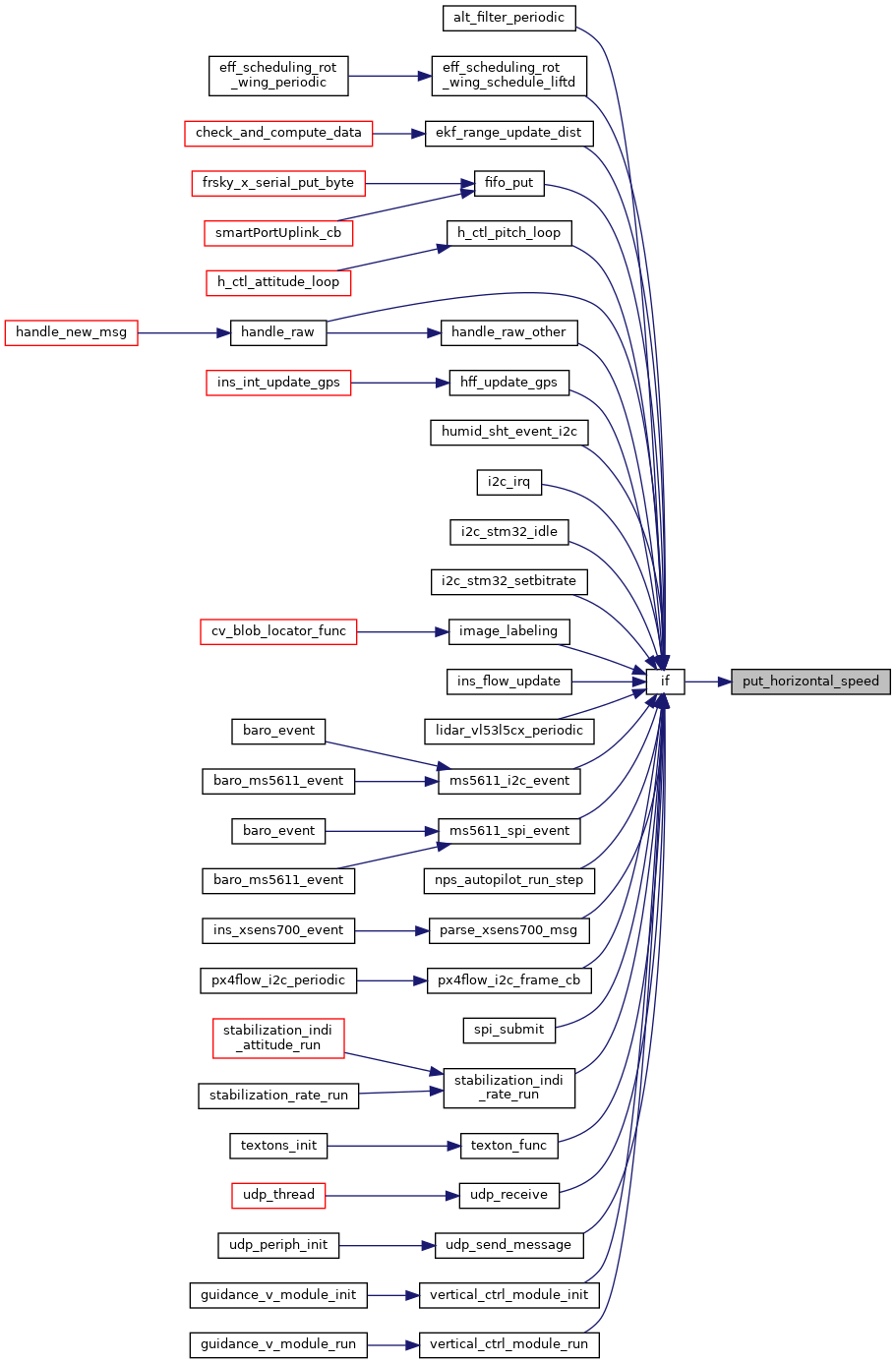
References E_ID_H_SPEED, foo, and stateGetHorizontalSpeedNorm_f().
Referenced by if().
Here is the call graph for this function: Here is the caller graph for this function:warning! strong dependency over GCC!
Definition at line 43 of file e_identification_fr.c.
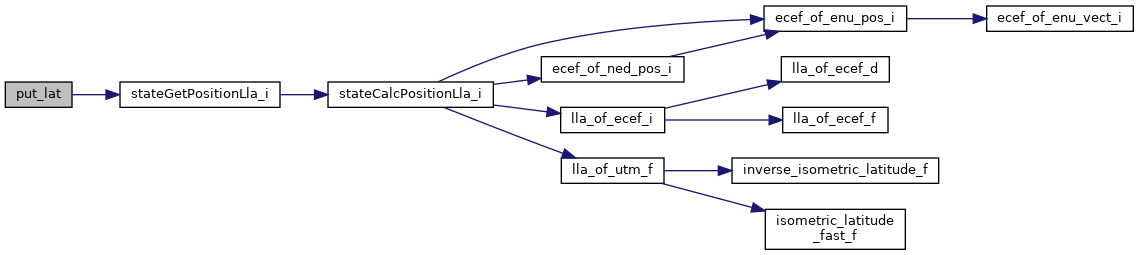
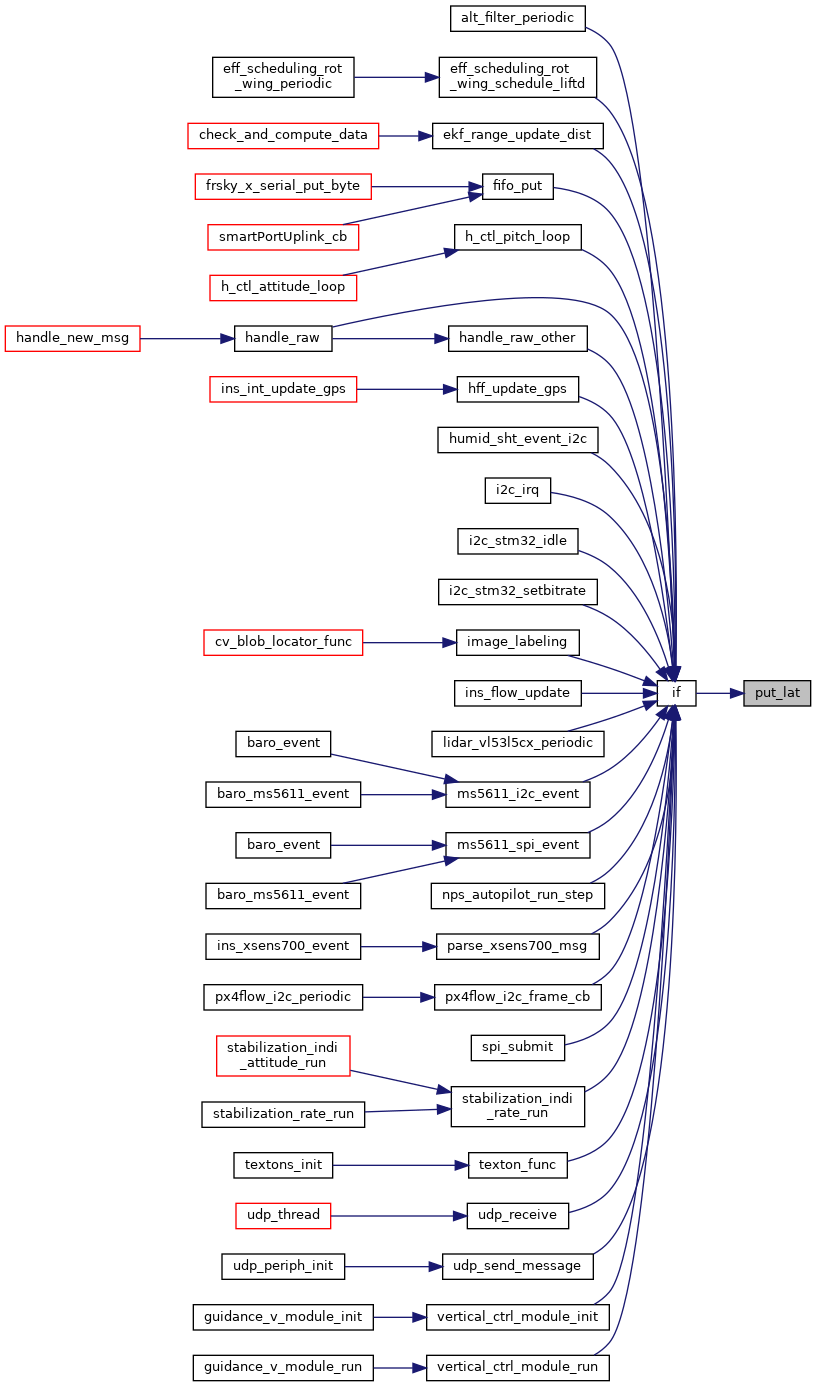
References E_ID_LAT, foo, LlaCoor_i::lat, and stateGetPositionLla_i().
Referenced by if().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 99 of file e_identification_fr.c.
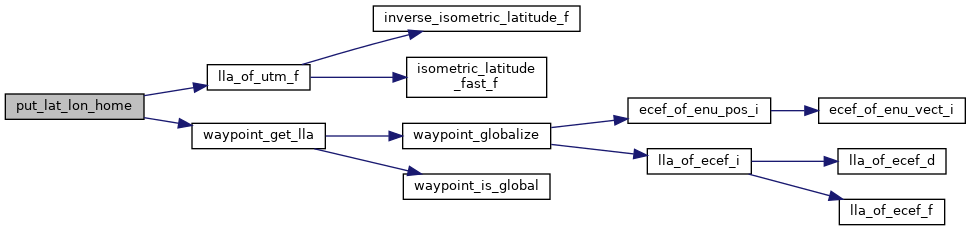
References E_ID_LAT_TO, E_ID_LON_TO, UtmCoor_f::east, foo, LLA_BFP_OF_REAL, lla_of_utm_f(), nav_utm_east0, nav_utm_north0, nav_utm_zone0, offset, waypoint_get_lla(), waypoints, point::x, and point::y.
Referenced by if().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 54 of file e_identification_fr.c.
References E_ID_LON, foo, LlaCoor_i::lon, and stateGetPositionLla_i().
Referenced by if().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 83 of file e_identification_fr.c.
References E_ID_ROUTE, foo, and stateGetHorizontalSpeedDir_f().
Referenced by if().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 40 of file e_identification_fr.c.
Referenced by if().
Definition at line 41 of file e_identification_fr.c.
Referenced by e_identification_fr_periodic().