|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
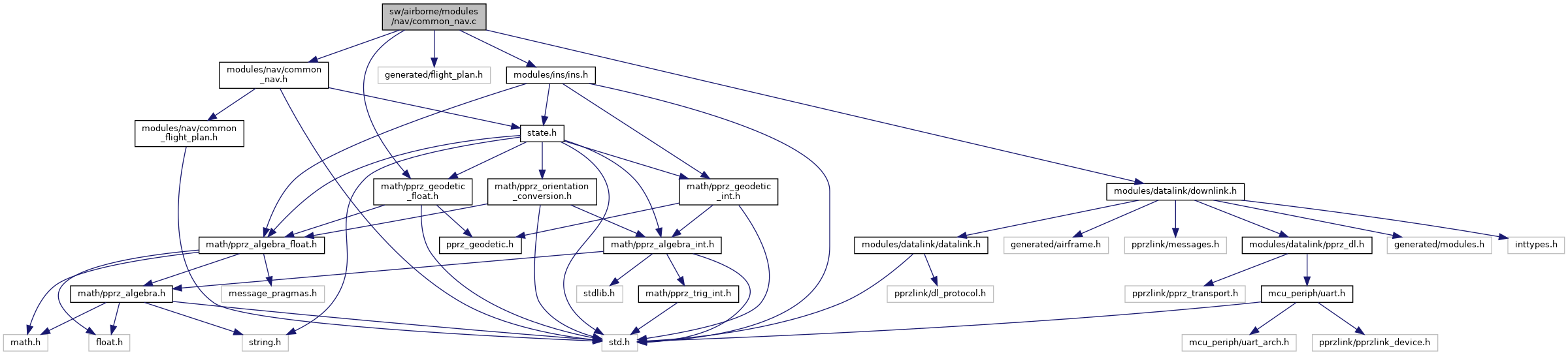
#include "modules/nav/common_nav.h"#include "generated/flight_plan.h"#include "modules/ins/ins.h"#include "math/pprz_geodetic_float.h"#include "modules/datalink/downlink.h"#include "state.h"#include "modules/gps/gps.h" Include dependency graph for common_nav.c: This graph shows which files directly or indirectly include this file:
Include dependency graph for common_nav.c: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | compute_dist2_to_home (void) |
| Computes squared distance to the HOME waypoint. | |
| float | get_time_to_home (void) |
| Compute time to home use wind and airspeed when available. | |
| void | nav_reset_utm_zone (void) |
| Reset the UTM zone to current GPS fix. | |
| void | nav_reset_reference (void) |
| Reset the geographic reference to the current GPS fix. | |
| void | nav_reset_alt (void) |
| Reset the altitude reference to the current GPS alt. | |
| void | nav_update_waypoints_alt (void) |
| Shift altitude of the waypoint according to a new ground altitude. | |
| void | common_nav_periodic_task () |
| void | nav_move_waypoint (uint8_t wp_id, float ux, float uy, float alt) |
| Move a waypoint to given UTM coordinates. | |
| void | nav_move_waypoint_enu (uint8_t wp_id, float x, float y, float alt) |
| Move a waypoint in local frame. | |
| void | nav_move_waypoint_point (uint8_t wp_id, struct point *p) |
| Move a waypoint from point structure (local frame). | |
| void | nav_send_waypoint (uint8_t wp_id) |
| Send a waypoint throught default telemetry channel. | |
Variables | |
| float | dist2_to_home |
| float | dist2_to_wp |
| bool | too_far_from_home |
| const uint8_t | nb_waypoint = NB_WAYPOINT |
| struct point | waypoints [NB_WAYPOINT] = WAYPOINTS_UTM |
| size == nb_waypoint, waypoint 0 is a dummy waypoint | |
| float | ground_alt |
| size == nb_waypoint, waypoint 0 is a dummy waypoint | |
| int32_t | nav_utm_east0 = NAV_UTM_EAST0 |
| int32_t | nav_utm_north0 = NAV_UTM_NORTH0 |
| uint8_t | nav_utm_zone0 = NAV_UTM_ZONE0 |
| float | max_dist_from_home = MAX_DIST_FROM_HOME |
| static float | previous_ground_alt |
Definition at line 169 of file common_nav.c.
References block_time, foo, NAVIGATION_FREQUENCY, and stage_time.
Referenced by navigation_task().
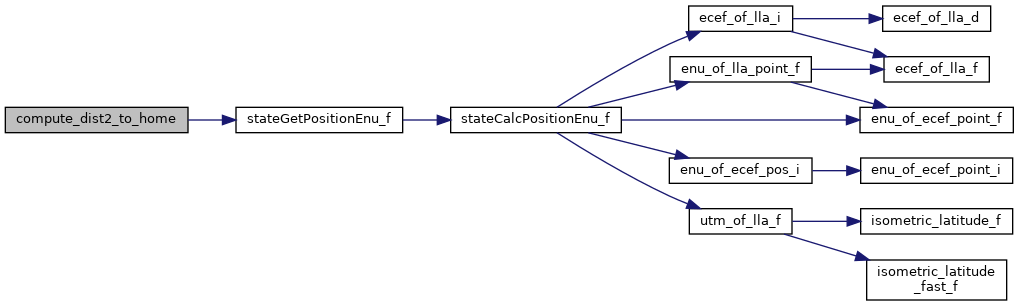
Here is the caller graph for this function:Computes squared distance to the HOME waypoint.
Computes squared distance to the HOME waypoint potentially sets too_far_from_home.
Updates dist2_to_home and potentially sets too_far_from_home
Definition at line 56 of file common_nav.c.
References dist2_to_home, foo, stateGetPositionEnu_f(), too_far_from_home, waypoints, EnuCoor_f::x, point::x, EnuCoor_f::y, and point::y.
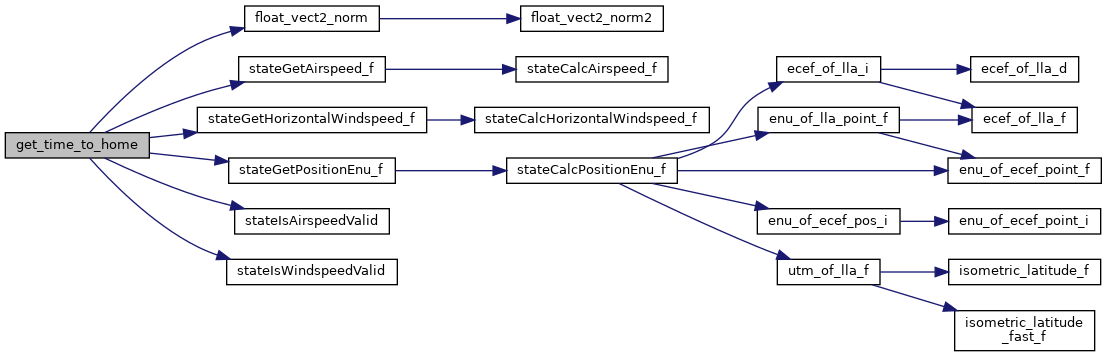
Here is the call graph for this function:Compute time to home use wind and airspeed when available.
Definition at line 71 of file common_nav.c.
References float_vect2_norm(), foo, stateGetAirspeed_f(), stateGetHorizontalWindspeed_f(), stateGetPositionEnu_f(), stateIsAirspeedValid(), stateIsWindspeedValid(), waypoints, FloatVect2::x, EnuCoor_f::x, point::x, FloatVect2::y, EnuCoor_f::y, and point::y.
Here is the call graph for this function:Move a waypoint to given UTM coordinates.
| [in] | wp_id | Waypoint ID |
| [in] | ux | UTM x (east) coordinate |
| [in] | uy | UTM y (north) coordinate |
| [in] | alt | Altitude above MSL. |
Definition at line 180 of file common_nav.c.
References point::a, LlaCoor_f::alt, foo, max_dist_from_home, nav_utm_east0, nav_utm_north0, nb_waypoint, waypoints, point::x, and point::y.
Referenced by nav_parse_MOVE_WP().
Here is the caller graph for this function:Move a waypoint in local frame.
| [in] | wp_id | Waypoint ID |
| [in] | ux | x (east) coordinate |
| [in] | uy | y (north) coordinate |
| [in] | alt | Altitude above MSL. |
Definition at line 200 of file common_nav.c.
References point::a, LlaCoor_f::alt, foo, max_dist_from_home, nb_waypoint, waypoints, point::x, and point::y.
Referenced by nav_lace_run(), nav_move_waypoint_point(), nav_rosette_run(), and nav_trinity_run().
Here is the caller graph for this function:Move a waypoint from point structure (local frame).
| [in] | wp_id | Waypoint ID |
| [in] | p | new point |
Definition at line 218 of file common_nav.c.
References nav_move_waypoint_enu(), and p.
Referenced by cloud_sim_move(), and cloud_sim_reset().
Here is the call graph for this function: Here is the caller graph for this function:Reset the altitude reference to the current GPS alt.
Definition at line 151 of file common_nav.c.
References foo, ground_alt, INS_RESET_VERTICAL_REF, previous_ground_alt, and stateGetHmslOrigin_f().
Here is the call graph for this function:Reset the geographic reference to the current GPS fix.
Definition at line 135 of file common_nav.c.
References UtmCoor_f::east, foo, ground_alt, INS_RESET_REF, nav_utm_east0, nav_utm_north0, nav_utm_zone0, UtmCoor_f::north, previous_ground_alt, stateGetHmslOrigin_f(), stateGetUtmOrigin_f(), and UtmCoor_f::zone.
Here is the call graph for this function:Reset the UTM zone to current GPS fix.
Definition at line 107 of file common_nav.c.
References foo, gps, GPS_VALID_POS_UTM_BIT, ground_alt, lla_of_utm_f(), nav_utm_east0, nav_utm_north0, nav_utm_zone0, stateSetLocalUtmOrigin_f(), utm_of_lla_f(), GpsState::utm_pos, GpsState::valid_fields, UtmCoor_f::zone, and UtmCoor_i::zone.
Here is the call graph for this function:Send a waypoint throught default telemetry channel.
| [in] | wp_id | Waypoint ID |
Definition at line 226 of file common_nav.c.
References point::a, DefaultChannel, DefaultDevice, foo, nav_utm_east0, nav_utm_north0, nav_utm_zone0, nb_waypoint, waypoints, point::x, point::y, and UtmCoor_f::zone.
Referenced by cloud_sim_move(), cloud_sim_reset(), nav_lace_run(), nav_rosette_run(), and nav_trinity_run().
Here is the caller graph for this function:Shift altitude of the waypoint according to a new ground altitude.
Definition at line 161 of file common_nav.c.
References point::a, foo, ground_alt, previous_ground_alt, and waypoints.
| float dist2_to_home |
Definition at line 38 of file common_nav.c.
Referenced by compute_dist2_to_home(), monitor_task(), and nav_home().
| float dist2_to_wp |
Definition at line 39 of file common_nav.c.
Referenced by nav_approaching_xy(), nav_home(), nav_periodic_task(), and rotwing_state_choose_state_by_dist().
| float ground_alt |
size == nb_waypoint, waypoint 0 is a dummy waypoint
altitude of the ground in m above MSL
Definition at line 46 of file common_nav.c.
Referenced by baro_ets_read_event(), baro_MS5534A_event(), formation_flight(), formation_init(), ins_alt_float_update_baro(), nav_cube_run(), nav_home(), nav_init(), nav_lace_run(), nav_reset_alt(), nav_reset_reference(), nav_reset_utm_zone(), nav_rosette_run(), nav_trinity_run(), nav_update_waypoints_alt(), parachute_compute_approach(), send_nav_ref(), stop_formation(), tcas_init(), tcas_periodic_task_1Hz(), and tcas_periodic_task_4Hz().
| float max_dist_from_home = MAX_DIST_FROM_HOME |
Definition at line 51 of file common_nav.c.
Referenced by nav_move_waypoint(), and nav_move_waypoint_enu().
| int32_t nav_utm_east0 = NAV_UTM_EAST0 |
Definition at line 48 of file common_nav.c.
Referenced by copilot_parse_move_wp_dl(), DownlinkSendWp(), ins_alt_float_init(), ins_float_invariant_init(), ins_gps_passthrough_init(), ins_mekf_wind_wrapper_init(), ins_xsens700_init(), ins_xsens_init(), mission_point_of_lla(), nav_move_waypoint(), nav_parse_MOVE_WP(), nav_reset_reference(), nav_reset_utm_zone(), nav_send_waypoint(), put_lat_lon_home(), and send_nav_ref().
| int32_t nav_utm_north0 = NAV_UTM_NORTH0 |
Definition at line 49 of file common_nav.c.
Referenced by copilot_parse_move_wp_dl(), DownlinkSendWp(), ins_alt_float_init(), ins_float_invariant_init(), ins_gps_passthrough_init(), ins_mekf_wind_wrapper_init(), ins_xsens700_init(), ins_xsens_init(), mission_point_of_lla(), nav_move_waypoint(), nav_parse_MOVE_WP(), nav_reset_reference(), nav_reset_utm_zone(), nav_send_waypoint(), put_lat_lon_home(), and send_nav_ref().
| uint8_t nav_utm_zone0 = NAV_UTM_ZONE0 |
Definition at line 50 of file common_nav.c.
Referenced by copilot_parse_move_wp_dl(), DownlinkSendWp(), gps_cb(), gps_cb(), gps_cb(), gps_cb(), ins_alt_float_init(), ins_alt_float_update_gps(), ins_float_invariant_init(), ins_float_invariant_update_gps(), ins_gps_passthrough_init(), ins_mekf_wind_wrapper_init(), ins_xsens700_init(), ins_xsens_init(), mission_point_of_lla(), nav_parse_MOVE_WP(), nav_reset_reference(), nav_reset_utm_zone(), nav_send_waypoint(), put_lat_lon_home(), and send_nav_ref().
| const uint8_t nb_waypoint = NB_WAYPOINT |
Definition at line 43 of file common_nav.c.
Referenced by cam_gimbal_set_wp_id(), cam_gimbal_waypoint_target(), copilot_parse_move_wp_dl(), distance_to_wp(), DownlinkSendWpNr(), nav_move_waypoint(), nav_move_waypoint_enu(), nav_send_waypoint(), send_wp_moved(), and send_wp_moved().
|
static |
Definition at line 104 of file common_nav.c.
Referenced by nav_reset_alt(), nav_reset_reference(), and nav_update_waypoints_alt().
| bool too_far_from_home |
Definition at line 41 of file common_nav.c.
Referenced by autopilot_failsafe_checks(), and compute_dist2_to_home().
| struct point waypoints[NB_WAYPOINT] = WAYPOINTS_UTM |
size == nb_waypoint, waypoint 0 is a dummy waypoint
Definition at line 44 of file common_nav.c.
Referenced by cloud_sim_move(), collective_tracking_waypoint(), compute_dist2_to_home(), copilot_parse_move_wp_dl(), distance_to_wp(), distributed_circular(), DownlinkSendWp(), draw_osd(), follow_me_periodic(), follow_me_set_wp(), get_dist2_to_waypoint(), get_time_to_home(), get_two_intersects(), gvf_get_two_intersects(), mission_point_of_lla(), nav_compute_baseleg(), nav_compute_final_from_glide(), nav_cube_run(), nav_cube_setup(), nav_eight(), nav_flower_run(), nav_glide(), nav_gvf_survey_polygon_setup(), nav_home(), nav_init(), nav_land_run(), nav_line_border_run(), nav_line_osam_run(), nav_line_run(), nav_move_waypoint(), nav_move_waypoint_enu(), nav_oval(), nav_parse_MOVE_WP(), nav_send_waypoint(), nav_skid_landing_glide(), nav_skid_landing_run(), nav_skid_landing_setup(), nav_spiral_setup(), nav_survey_disc_run(), nav_survey_poly_osam_run(), nav_survey_poly_osam_setup(), nav_survey_poly_osam_setup_towards(), nav_survey_poly_run(), nav_survey_poly_setup(), nav_survey_poly_setup_towards(), nav_survey_polygon_setup(), nav_survey_rectangle(), nav_survey_rectangle_rotorcraft_run(), nav_survey_rectangle_rotorcraft_setup(), nav_survey_zamboni_setup(), nav_update_waypoints_alt(), nav_vertical_raster_run(), NavApproaching(), NavApproachingFrom(), NavCircleWaypoint(), NavGotoWaypoint(), NavSegment(), Oval(), parachute_compute_approach(), put_lat_lon_home(), rotorcraft_cam_periodic(), rotwing_state_choose_circle_direction(), rotwing_state_choose_state_by_dist(), send_wp_moved(), and update_waypoint().