|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Filters altitude and climb rate for fixedwings. More...
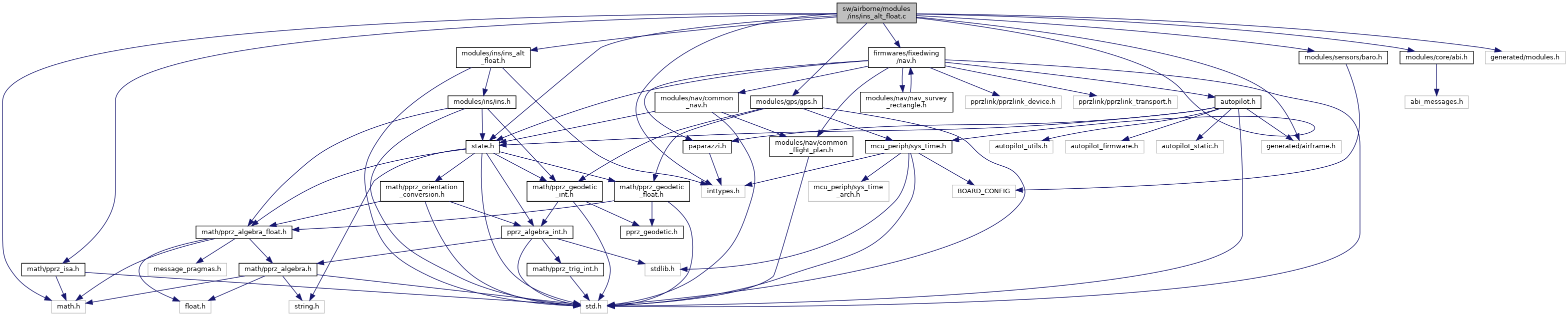
#include "modules/ins/ins_alt_float.h"#include "modules/core/abi.h"#include "state.h"#include <inttypes.h>#include <math.h>#include "mcu_periph/sys_time.h"#include "modules/gps/gps.h"#include "firmwares/fixedwing/nav.h"#include "generated/airframe.h"#include "generated/modules.h"#include "generated/flight_plan.h"#include "modules/sensors/baro.h"#include "math/pprz_isa.h" Include dependency graph for ins_alt_float.c:
Include dependency graph for ins_alt_float.c:Go to the source code of this file.
Macros | |
| #define | USE_INS_NAV_INIT TRUE |
| #define | INS_ALT_BARO_ID ABI_BROADCAST |
| #define | INS_ALT_GPS_ID GPS_MULTI_ID |
| ABI binding for gps data. | |
| #define | INS_ALT_IMU_ID ABI_BROADCAST |
| #define | GPS_SIGMA2 1. |
| #define | GPS_R 2. |
Functions | |
| static void | baro_cb (uint8_t sender_id, uint32_t stamp, float pressure) |
| static void | gps_cb (uint8_t sender_id, uint32_t stamp, struct GpsState *gps_s) |
| static void | accel_cb (uint8_t sender_id, uint32_t stamp, struct Int32Vect3 *accel) |
| static void | reset_cb (uint8_t sender_id, uint8_t flag) |
| static void | alt_kalman_reset (void) |
| static void | alt_kalman_init (void) |
| static void | alt_kalman (float z_meas, float dt) |
| void | ins_alt_float_update_gps (struct GpsState *gps_s) |
| void | ins_alt_float_init (void) |
| static void | reset_ref (void) |
| static void | reset_vertical_ref (void) |
| void | ins_alt_float_update_baro (float pressure) |
Variables | |
| struct InsAltFloat | ins_altf |
| abi_event | baro_ev |
| static abi_event | gps_ev |
| static abi_event | accel_ev |
| static abi_event | reset_ev |
| static float | p [2][2] |
Filters altitude and climb rate for fixedwings.
Definition in file ins_alt_float.c.
| #define GPS_R 2. |
Definition at line 271 of file ins_alt_float.c.
| #define GPS_SIGMA2 1. |
Definition at line 270 of file ins_alt_float.c.
| #define INS_ALT_BARO_ID ABI_BROADCAST |
Definition at line 67 of file ins_alt_float.c.
| #define INS_ALT_GPS_ID GPS_MULTI_ID |
| #define INS_ALT_IMU_ID ABI_BROADCAST |
Definition at line 87 of file ins_alt_float.c.
Definition at line 50 of file ins_alt_float.c.
|
static |
Definition at line 376 of file ins_alt_float.c.
References ACCEL_BFP_OF_REAL, foo, int32_rmat_transp_vmult(), stateGetNedToBodyRMat_i(), stateSetAccelBody_i(), stateSetAccelNed_i(), and VECT3_COPY.
Referenced by ins_alt_float_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 288 of file ins_alt_float.c.
References InsAltFloat::alt, alt_baro_enabled, InsAltFloat::alt_dot, baro_amsys_enabled, baro_amsys_r, baro_amsys_sigma2, baro_bmp_enabled, baro_bmp_r, baro_bmp_sigma2, baro_ets_enabled, baro_ets_r, baro_ets_sigma2, baro_MS5534A_r, baro_MS5534A_sigma2, baro_ms5611_enabled, baro_ms5611_r, baro_ms5611_sigma2, DefaultChannel, DefaultDevice, foo, GPS_R, GPS_SIGMA2, ins_altf, and p.
Referenced by ins_alt_float_init(), ins_alt_float_update_baro(), and ins_alt_float_update_gps().
Here is the caller graph for this function:Definition at line 283 of file ins_alt_float.c.
References alt_kalman_reset().
Referenced by ins_alt_float_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 275 of file ins_alt_float.c.
References p.
Referenced by alt_kalman_init(), ins_alt_float_update_baro(), and ins_alt_float_update_gps().
Here is the caller graph for this function:Definition at line 363 of file ins_alt_float.c.
References ins_alt_float_update_baro().
Referenced by ins_alt_float_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 369 of file ins_alt_float.c.
References foo, and ins_alt_float_update_gps().
Referenced by ins_alt_float_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 101 of file ins_alt_float.c.
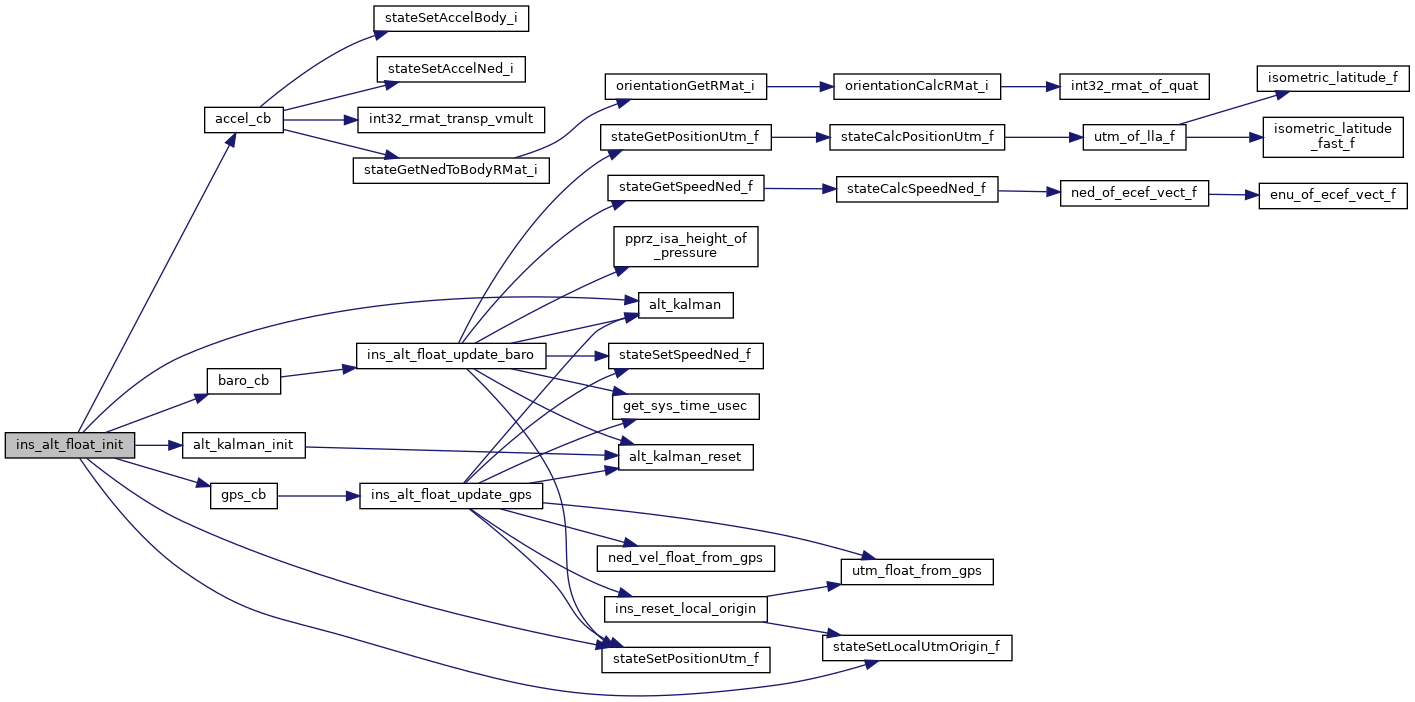
References ABI_BROADCAST, accel_cb(), accel_ev, alt_kalman(), alt_kalman_init(), InsAltFloat::baro_alt, baro_cb(), baro_ev, InsAltFloat::baro_initialized, foo, gps_cb(), gps_ev, INS_ALT_BARO_ID, INS_ALT_GPS_ID, INS_ALT_IMU_ID, ins_altf, nav_utm_east0, nav_utm_north0, nav_utm_zone0, InsAltFloat::origin_initialized, InsAltFloat::qfe, InsAltFloat::reset_alt_ref, reset_cb(), reset_ev, stateSetLocalUtmOrigin_f(), and stateSetPositionUtm_f().
Here is the call graph for this function:Definition at line 172 of file ins_alt_float.c.
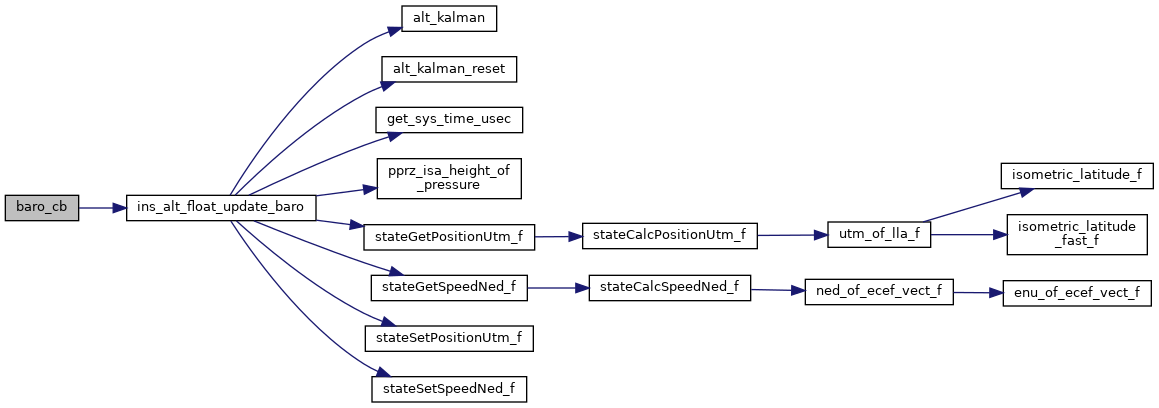
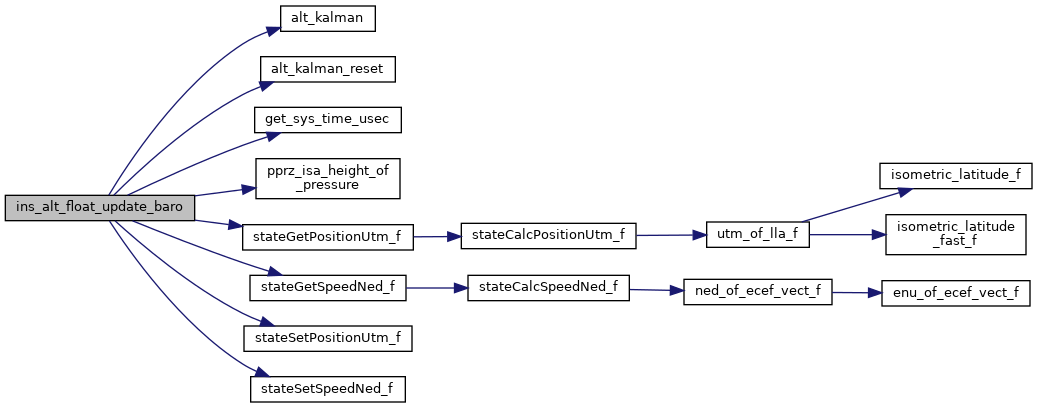
References InsAltFloat::alt, InsAltFloat::alt_dot, alt_kalman(), alt_kalman_reset(), InsAltFloat::baro_alt, InsAltFloat::baro_initialized, foo, get_sys_time_usec(), ground_alt, ins_altf, last_ts, pprz_isa_height_of_pressure(), InsAltFloat::qfe, InsAltFloat::reset_alt_ref, stateGetPositionUtm_f(), stateGetSpeedNed_f(), stateSetPositionUtm_f(), stateSetSpeedNed_f(), UTM_COPY, and NedCoor_f::z.
Referenced by baro_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 217 of file ins_alt_float.c.
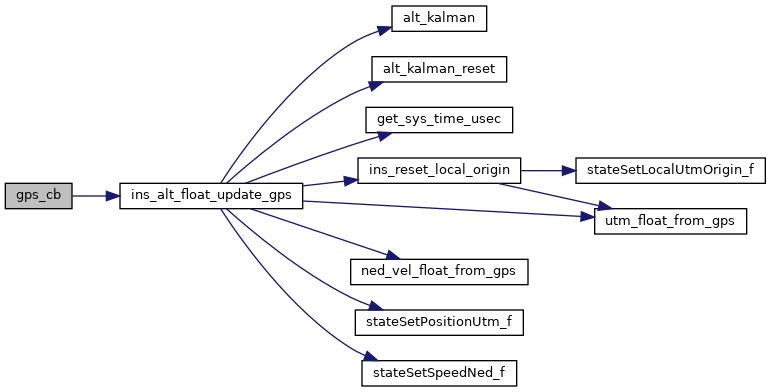
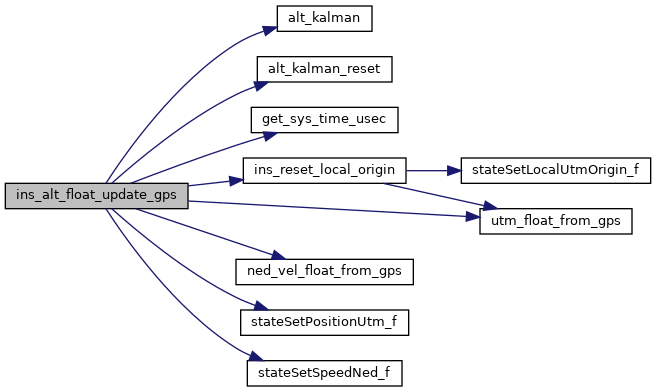
References InsAltFloat::alt, InsAltFloat::alt_dot, alt_kalman(), alt_kalman_reset(), foo, get_sys_time_usec(), GPS_FIX_3D, ins_altf, last_ts, nav_utm_zone0, ned_vel_float_from_gps(), InsAltFloat::origin_initialized, InsAltFloat::reset_alt_ref, reset_ref(), stateSetPositionUtm_f(), stateSetSpeedNed_f(), utm_float_from_gps(), and NedCoor_f::z.
Referenced by gps_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 156 of file ins_alt_float.c.
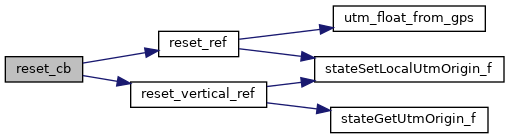
References foo, INS_RESET_REF, INS_RESET_VERTICAL_REF, reset_ref(), and reset_vertical_ref().
Referenced by ins_alt_float_init().
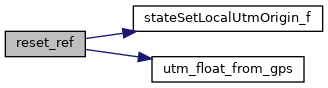
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 134 of file ins_alt_float.c.
References foo, gps, ins_altf, InsAltFloat::origin_initialized, InsAltFloat::reset_alt_ref, stateSetLocalUtmOrigin_f(), and utm_float_from_gps().
Referenced by ins_alt_float_update_gps(), and reset_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 145 of file ins_alt_float.c.
References foo, gps, GpsState::hmsl, ins_altf, InsAltFloat::reset_alt_ref, stateGetUtmOrigin_f(), and stateSetLocalUtmOrigin_f().
Referenced by reset_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 89 of file ins_alt_float.c.
Referenced by ins_alt_float_init().
| abi_event baro_ev |
Definition at line 72 of file ins_alt_float.c.
Referenced by ins_alt_float_init().
|
static |
Definition at line 83 of file ins_alt_float.c.
Referenced by ins_alt_float_init().
| struct InsAltFloat ins_altf |
Definition at line 54 of file ins_alt_float.c.
Referenced by alt_kalman(), ins_alt_float_init(), ins_alt_float_update_baro(), ins_alt_float_update_gps(), reset_ref(), and reset_vertical_ref().
|
static |
Definition at line 273 of file ins_alt_float.c.
Referenced by _chvsnprintf(), ads1114_read(), alt_kalman(), alt_kalman_reset(), baro_apply_calibration(), baro_bmp280_event(), baro_bmp3_event(), bluegiga_broadcast_msg(), bluegiga_ch_available(), bluegiga_init(), bluegiga_load_tx(), bluegiga_transmit(), bmp085_compensated_pressure(), collective_tracking_control(), compensate_pressure(), compute_tas_factor(), convert_walls_to_ltp(), crc_crc8(), crc_packet(), ctc_target_send_info_to_nei(), cv_blob_locator_func(), dev_char_available(), dev_check_free_space(), dev_get_byte(), dev_put_buffer(), dev_put_byte(), dev_send_message(), distributed_circular(), dqrdc(), ekf_aw_propagate(), ekf_aw_wrapper_fetch(), eperiodToPacked(), fast9_detect(), fast9_detect_pixel(), faulhaber_parse_msg(), faulhaber_parser(), find_nearest_wall(), fit_linear_flow_field(), float_mat_exp(), frsky_x_serial_char_available(), frsky_x_serial_check_free_space(), frsky_x_serial_get_byte(), frsky_x_serial_put_buffer(), frsky_x_serial_put_byte(), frsky_x_serial_send_message(), get_dist2_to_point(), get_tas_factor(), gps_i2c_put_buffer(), grayscale_opencv_to_yuv422(), gvf_ellipse_info(), gvf_intercept_two_lines(), gvf_line_info(), gvf_sin_info(), handle_spi_thd(), htond(), htonf(), i2c_arch_init(), i2c_blocking_receive(), i2c_blocking_submit(), i2c_blocking_transceive(), i2c_blocking_transmit(), i2c_chibios_submit(), i2c_idle(), i2c_init(), i2c_linux_submit(), i2c_receive(), i2c_setbitrate(), i2c_submit(), i2c_thread(), i2c_transceive(), i2c_transmit(), image_labeling(), imu_gyro_raw_cb(), indi_init_filters(), init_filters(), init_walls(), ins_mekf_wind_get_pos_ned(), ins_mekf_wind_set_pos_ned(), intercept_two_lines(), jpeg_create_svs_header(), logger_uart_periodic(), long_to_string_with_divisor(), ltoa(), mag_calc(), mavlink_send_attitude(), mavlink_send_attitude(), mavlink_send_attitude_quaternion(), mavlink_send_highres_imu(), mf_daq_send_state(), ms5607_calc(), ms5611_calc(), nav_gvf_ik_segment_XY1_XY2(), nav_gvf_segment_XY1_XY2(), nav_move_waypoint_point(), navdata_update(), operator delete(), opticFlowLK(), opticFlowLK_flat(), out_of_segment_area(), parse_mf_daq_msg(), pipe_arch_periph_init(), pipe_char_available(), pipe_check_free_space(), pipe_getch(), pipe_periph_init(), pipe_put_buffer(), pipe_put_byte(), pipe_receive(), pipe_send_message(), pipe_send_raw(), pprz_polyfit_float(), px4flash_event(), rc_mode_switch(), RotateAndTranslateToWorld(), RotateAndTranslateToWorld(), RotateAndTranslateToWorld(), rtcm3_find_callback(), rtcm3_register_callback(), sdlog_send(), sdlogger_spi_direct_char_available(), sdlogger_spi_direct_check_free_space(), sdlogger_spi_direct_get_byte(), sdlogger_spi_direct_put_buffer(), sdlogger_spi_direct_put_byte(), sdlogger_spi_direct_send_message(), send_body_rates_accel(), send_ins_flow(), send_tune_roll(), sim_overwrite_lidar(), sirf_parse_2(), sirf_parse_41(), softi2c_device_event(), softi2c_idle(), softi2c_spin(), softi2c_submit(), spi_blocking_transceive(), spi_init(), spi_lock(), spi_resume(), spi_slave_init(), spi_submit(), stabilization_attitude_quat_float_init(), stabilization_indi_update_filt_freq(), superbitrf_check_free_space(), superbitrf_transmit(), superbitrf_transmit_buffer(), teraranger_crc8(), THD_FUNCTION(), TranslateAndRotateFromWorld(), TranslateAndRotateFromWorld(), TranslateAndRotateFromWorld(), TranslateAndRotateFromWorld(), uart_char_available(), uart_check_free_space(), uart_getch(), uart_periph_init(), uart_periph_set_baudrate(), uart_periph_set_bits_stop_parity(), uart_periph_set_mode(), uart_put_buffer(), uart_put_byte(), uavcan_tx(), udp_arch_periph_init(), udp_char_available(), udp_check_free_space(), udp_getch(), udp_periph_init(), udp_put_buffer(), udp_put_byte(), udp_receive(), udp_send_message(), udp_send_raw(), UKF_Wind_Estimator_step(), usage(), usart_isr(), and wls_alloc().
|
static |
Definition at line 92 of file ins_alt_float.c.
Referenced by ins_alt_float_init().