|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

Common tools for periodic telemetry interface Allows subsystem to register callback functions. More...
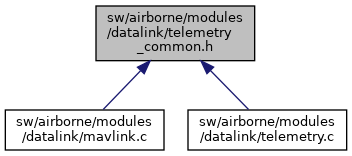
#include <inttypes.h>#include "std.h"#include "pprzlink/pprzlink_device.h"#include "pprzlink/pprzlink_transport.h"#include "pprzlink/messages.h" Include dependency graph for telemetry_common.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for telemetry_common.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | telemetry_cb_slots |
| struct | periodic_telemetry |
| Periodic telemetry structure. More... | |
Macros | |
| #define | TELEMETRY_NB_CBS 4 |
| number of callbacks that can be registered per msg | |
Typedefs | |
| typedef void(* | telemetry_cb) (struct transport_tx *trans, struct link_device *dev) |
| Telemetry callback definition. | |
| typedef const char | telemetry_msg[64] |
| periodic telemetry msg name definition | |
Functions | |
| void | telemetry_reporting_task (void) |
| Periodic task. | |
| int16_t | register_periodic_telemetry (struct periodic_telemetry *_pt, uint16_t _id, telemetry_cb _cb) |
| Register a telemetry callback function. | |
| void | periodic_telemetry_err_report (uint8_t _process, uint8_t _mode, uint16_t _id) |
| Send an error report when trying to send message that as not been register. | |
Common tools for periodic telemetry interface Allows subsystem to register callback functions.
Definition in file telemetry_common.h.
| struct telemetry_cb_slots |
Definition at line 53 of file telemetry_common.h.
Collaboration diagram for telemetry_cb_slots:| Data Fields | ||
|---|---|---|
| uint16_t | id | id of telemetry message |
| telemetry_cb | slots[TELEMETRY_NB_CBS] | |
| struct periodic_telemetry |
Periodic telemetry structure.
Contains the total number of messages (from generated telemetry file) and the list of registered callbacks
Definition at line 62 of file telemetry_common.h.
Collaboration diagram for periodic_telemetry:| Data Fields | ||
|---|---|---|
| struct telemetry_cb_slots * | cbs | array of callbacks defined through TELEMETRY_MSG |
| uint16_t | nb | number of messages |
| #define TELEMETRY_NB_CBS 4 |
number of callbacks that can be registered per msg
Definition at line 51 of file telemetry_common.h.
| typedef void(* telemetry_cb) (struct transport_tx *trans, struct link_device *dev) |
Telemetry callback definition.
Definition at line 44 of file telemetry_common.h.
periodic telemetry msg name definition
Definition at line 48 of file telemetry_common.h.
Send an error report when trying to send message that as not been register.
| _process | telemetry process id |
| _mode | telemetry mode |
| _id | id of the message |
| _process | telemetry process id |
| _mode | telemetry mode |
| _id | id of the message in telemetry system (see var/<AC>/generated/periodic_telemetry.h) |
Definition at line 115 of file telemetry.c.
References DefaultChannel, DefaultDevice, foo, and mode.
|
extern |
Register a telemetry callback function.
empty implementation is provided if PERIODIC_TELEMETRY is not set or set to FALSE
| _pt | periodic telemetry structure to register |
| _id | message ID (use PPRZ_MSG_ID_<message_name> define) |
| _cb | callback function, called according to telemetry mode and specified period |
| _pt | periodic telemetry structure to register |
| _id | message ID (use PPRZ_MSG_ID_<message_name> define) |
| _cb | callback function, called according to telemetry mode and specified period |
Definition at line 51 of file telemetry.c.
References foo, telemetry_cb_slots::slots, and TELEMETRY_NB_CBS.
Referenced by actuators_bebop_init(), actuators_dshot_arch_init(), actuators_uavcan_init(), adc_generic_init(), ahrs_aligner_init(), ahrs_dcm_wrapper_init(), ahrs_fc_wrapper_init(), ahrs_finv_wrapper_init(), ahrs_icq_wrapper_init(), ahrs_madgwick_wrapper_init(), ahrs_mlkf_wrapper_init(), ahrs_vectornav_init(), ahrs_vectornav_wrapper_init(), air_data_init(), airspeed_ets_init(), airspeed_uavcan_init(), aoa_pwm_init(), approach_moving_target_init(), autopilot_firmware_init(), autopilot_init(), baro_bmp280_init(), battery_monitor_init(), bluegiga_init(), cam_init(), can_fuelcell_init(), commands_init(), ctc_init(), ctrl_windtunnel_init(), dcf_init(), detect_gate_init(), digital_cam_uart_init(), downlink_init(), dragspeed_init(), ekf_aw_wrapper_init(), esc32_init(), gec_dl_init(), gps_init(), gps_piksi_init(), guidance_h_init(), guidance_hybrid_init(), guidance_indi_init(), guidance_pid_init(), guidance_v_init(), gvf_ik_init(), gvf_init(), gvf_parametric_init(), h_ctl_init(), hff_init(), hott_init(), i2c_init(), imu_heater_init(), imu_init(), imu_vectornav_init(), init_parachute(), ins_ekf2_init(), ins_ext_pose_init(), ins_float_invariant_init(), ins_float_invariant_wrapper_init(), ins_flow_init(), ins_gps_passthrough_init(), ins_int_init(), ins_mekf_wind_wrapper_init(), ins_vectornav_init(), intermcu_init(), jevois_mavlink_init(), main_init(), main_recovery_init(), mateksys3901l0x_init(), mavlink_init(), max7456_init(), mission_init(), motor_mixing_init(), ms45xx_i2c_init(), nav_init(), nav_rotorcraft_init(), nav_rover_init(), nav_survey_rectangle_rotorcraft_init(), navdata_init(), oneloop_andi_init(), optical_flow_hover_init(), optical_flow_landing_init(), opticflow_module_init(), pca9685_i2c_init(), power_uavcan_init(), ppm_init(), radio_control_cc2500_init(), radio_control_init(), range_sensor_uavcan_init(), relative_localization_filter_init(), rotorcraft_cam_init(), rotwing_state_init(), rpm_sensor_init(), sbus_dual_init(), sbus_init(), sdlog_chibios_init(), sdp3x_init(), stabilization_attitude_euler_float_init(), stabilization_attitude_euler_int_init(), stabilization_attitude_plane_pid_init(), stabilization_attitude_quat_float_init(), stabilization_attitude_quat_int_init(), stabilization_indi_init(), stabilization_init(), stabilization_rate_init(), superbitrf_init(), sys_id_chirp_init(), sys_id_doublet_init(), sys_id_wave_init(), target_pos_init(), temp_adc_init(), tfmini_i2c_init(), tfmini_init(), throttle_curve_init(), uart_periph_init(), uav_recovery_init(), vff_init(), vff_init(), waypoints_init(), wind_estimation_quadrotor_init(), and wind_estimator_init().
Periodic task.
Periodic task.
Definition at line 77 of file telemetry.c.
References autopilot_send_version(), DefaultChannel, DefaultDevice, DefaultPeriodic, and foo.
Here is the call graph for this function: