|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

interface to TU Delft serial stereocam Include stereocam.xml to your airframe file. More...
#include "modules/stereocam/stereocam.h"#include "mcu_periph/uart.h"#include "modules/datalink/telemetry.h"#include "pprzlink/messages.h"#include "pprzlink/intermcu_msg.h"#include "mcu_periph/sys_time.h"#include "modules/core/abi.h"#include "stereocam_follow_me/follow_me.h"#include "filters/median_filter.h" Include dependency graph for stereocam.c:
Include dependency graph for stereocam.c:Go to the source code of this file.
Macros | |
| #define | FORWARD_IMAGE_DATA FALSE |
| #define | STEREO_BODY_TO_STEREO_PHI 0 |
| #define | STEREO_BODY_TO_STEREO_THETA 0 |
| #define | STEREO_BODY_TO_STEREO_PSI 0 |
| #define | STEREOCAM_USE_MEDIAN_FILTER 0 |
Functions | |
| void | stereocam_init (void) |
| static void | stereocam_parse_msg (void) |
| void | stereocam_event (void) |
| void | state2stereocam (void) |
Variables | |
| struct stereocam_t | stereocam |
| static uint8_t | stereocam_msg_buf [256] |
| The message buffer for the stereocamera. | |
| struct MedianFilter3Float | medianfilter |
interface to TU Delft serial stereocam Include stereocam.xml to your airframe file.
Parameters STEREO_PORT, STEREO_BAUD, SEND_STEREO should be configured with stereocam.xml.
Definition in file stereocam.c.
Definition at line 44 of file stereocam.c.
| #define STEREO_BODY_TO_STEREO_PHI 0 |
Definition at line 71 of file stereocam.c.
| #define STEREO_BODY_TO_STEREO_PSI 0 |
Definition at line 79 of file stereocam.c.
| #define STEREO_BODY_TO_STEREO_THETA 0 |
Definition at line 75 of file stereocam.c.
| #define STEREOCAM_USE_MEDIAN_FILTER 0 |
Definition at line 89 of file stereocam.c.
Definition at line 216 of file stereocam.c.
References stereocam_t::body_to_cam, cam_angles(), stereocam_t::device, float_rmat_mult(), foo, stateGetNedToBodyEulers_f(), stereocam, and stereocam_t::transport.
Here is the call graph for this function:Definition at line 202 of file stereocam.c.
References stereocam_t::device, foo, stereocam_t::msg_available, stereocam, stereocam_msg_buf, stereocam_parse_msg(), and stereocam_t::transport.
Here is the call graph for this function:Definition at line 95 of file stereocam.c.
References stereocam_t::body_to_cam, float_rmat_of_eulers, foo, InitMedianFilterVect3Float, MEDIAN_DEFAULT_SIZE, medianfilter, STEREO_BODY_TO_STEREO_PHI, STEREO_BODY_TO_STEREO_PSI, STEREO_BODY_TO_STEREO_THETA, stereocam, and stereocam_t::transport.
Definition at line 107 of file stereocam.c.
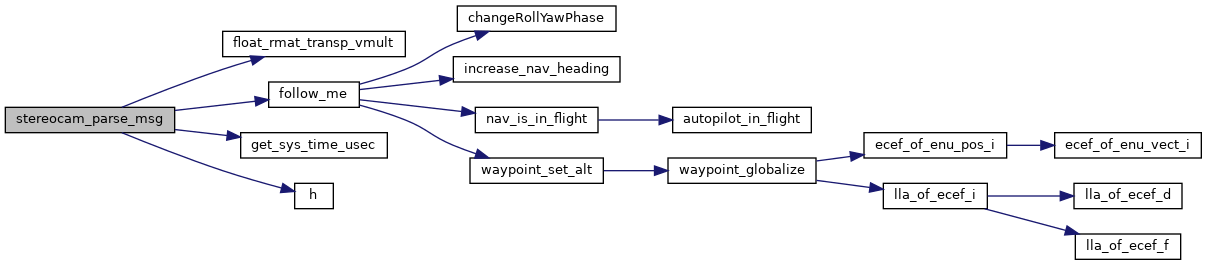
References stereocam_t::body_to_cam, DefaultChannel, DefaultDevice, float_rmat_transp_vmult(), follow_me(), foo, get_sys_time_usec(), h(), medianfilter, stereocam, stereocam_msg_buf, STEREOCAM_USE_MEDIAN_FILTER, UpdateMedianFilterVect3Float, VEL_STEREOCAM_ID, and FloatVect3::x.
Referenced by stereocam_event().
Here is the call graph for this function: Here is the caller graph for this function:| struct MedianFilter3Float medianfilter |
Definition at line 93 of file stereocam.c.
Referenced by stereocam_init(), and stereocam_parse_msg().
| struct stereocam_t stereocam |
Definition at line 82 of file stereocam.c.
Referenced by state2stereocam(), stereocam_event(), stereocam_init(), and stereocam_parse_msg().
|
static |
The message buffer for the stereocamera.
Definition at line 86 of file stereocam.c.
Referenced by stereocam_event(), and stereocam_parse_msg().