|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Guiding vector field algorithm for 2D and 3D parametric trajectories. More...
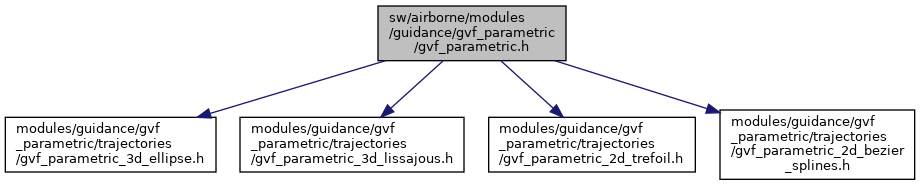
 Include dependency graph for gvf_parametric.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for gvf_parametric.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | gvf_parametric_con |
| struct | gvf_parametric_tel |
Macros | |
| #define | GVF_OCAML_GCS true |
Functions | |
| void | gvf_parametric_init (void) |
| void | gvf_parametric_set_direction (int8_t s) |
| void | gvf_parametric_control_2D (float, float, float, float, float, float, float, float) |
| void | gvf_parametric_control_3D (float, float, float, float, float, float, float, float, float, float, float, float) |
Variables | |
| gvf_parametric_con | gvf_parametric_control |
| gvf_parametric_tel | gvf_parametric_telemetry |
Guiding vector field algorithm for 2D and 3D parametric trajectories.
Definition in file gvf_parametric.h.
| struct gvf_parametric_con |
| struct gvf_parametric_tel |
Definition at line 59 of file gvf_parametric.h.
| Data Fields | ||
|---|---|---|
| int | e_len | |
| float | phi_errors[3] | |
| uint32_t | splines_ctr | |
Default GCS trajectory painter
Definition at line 32 of file gvf_parametric.h.
|
extern |
Definition at line 137 of file gvf_parametric.cpp.
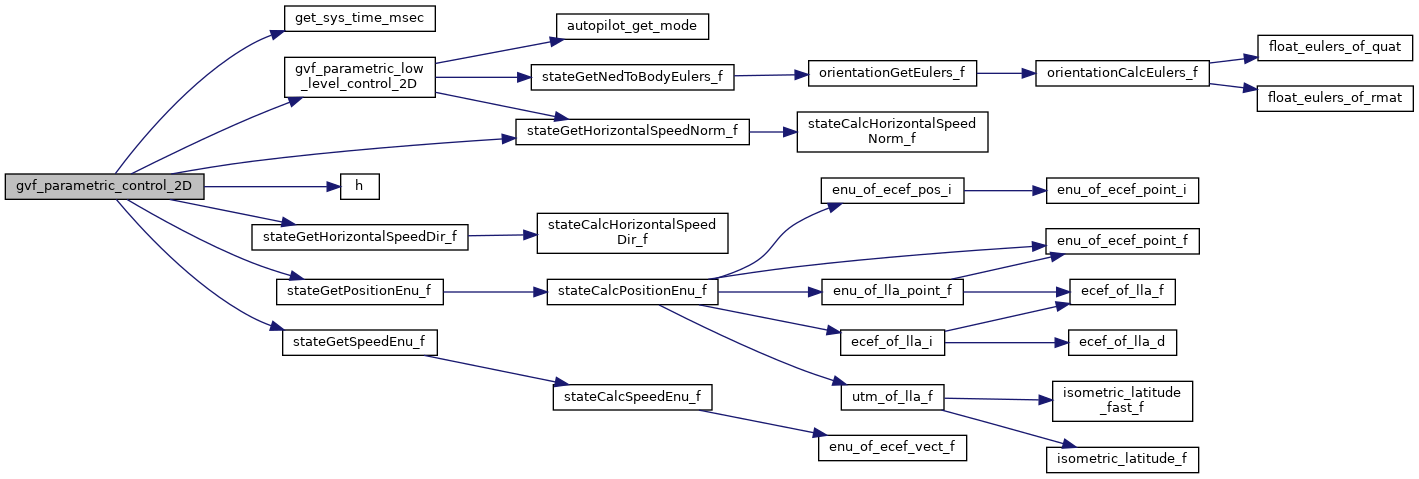
References gvf_parametric_con::beta, course, gvf_parametric_con::delta_T, desired_x, desired_y, gvf_parametric_tel::e_len, foo, get_sys_time_msec(), ground_speed, gvf_c_ctrl, gvf_c_info, gvf_low_level_control_2D(), gvf_parametric_control, gvf_parametric_t0, gvf_parametric_telemetry, h(), J, gvf_parametric_con::k_psi, gvf_common_info::kappa, gvf_parametric_con::L, gvf_common_ctrl::omega, gvf_common_info::ori_err, gvf_parametric_tel::phi_errors, gvf_parametric_con::s, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetPositionEnu_f(), stateGetSpeedEnu_f(), gvf_parametric_con::w, EnuCoor_f::x, and EnuCoor_f::y.
Referenced by nav_gvf_parametric_2D_bezier_run(), and nav_gvf_parametric_2D_trefoil_XY().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 117 of file gvf_parametric.cpp.
References gvf_parametric_con::beta, DefaultPeriodic, gvf_parametric_con::delta_T, foo, gvf_c_params, gvf_parametric_control, GVF_PARAMETRIC_CONTROL_BETA, GVF_PARAMETRIC_CONTROL_KCLIMB, GVF_PARAMETRIC_CONTROL_KPSI, GVF_PARAMETRIC_CONTROL_KROLL, GVF_PARAMETRIC_CONTROL_L, gvf_common_params::k_climb, gvf_parametric_con::k_psi, gvf_common_params::k_roll, gvf_parametric_con::L, register_periodic_telemetry(), gvf_parametric_con::s, send_gvf_parametric(), and gvf_parametric_con::w.
Here is the call graph for this function:Definition at line 347 of file gvf_parametric.cpp.
References gvf_parametric_control, gvf_parametric_con::s, and s.
|
extern |
Definition at line 64 of file gvf_parametric.cpp.
Referenced by gvf_parametric_control_2D(), gvf_parametric_init(), gvf_parametric_set_direction(), nav_gvf_parametric_2D_bezier_run(), nav_gvf_parametric_2D_bezier_wp(), nav_gvf_parametric_2D_trefoil_XY(), and send_gvf_parametric().
|
extern |
Definition at line 65 of file gvf_parametric.cpp.
Referenced by gvf_parametric_control_2D(), nav_gvf_parametric_2D_bezier_wp(), and send_gvf_parametric().