|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
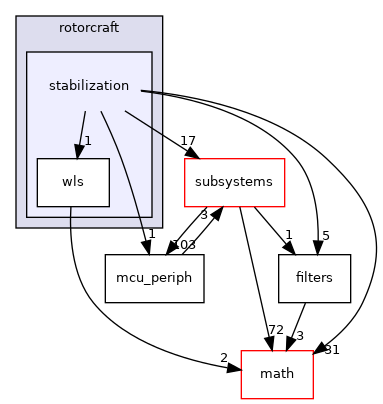
 Directory dependency graph for stabilization:
Directory dependency graph for stabilization:Directories | |
| directory | wls |
 1.8.17
1.8.17