|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
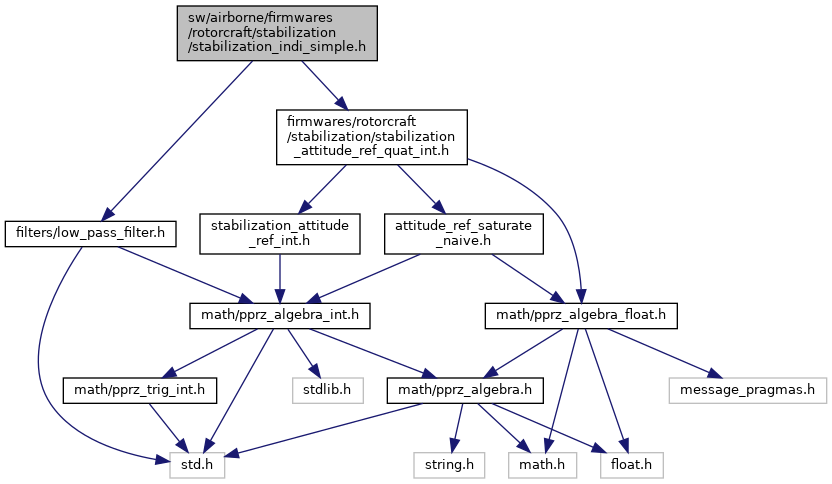
#include "firmwares/rotorcraft/stabilization/stabilization_attitude_ref_quat_int.h"#include "filters/low_pass_filter.h" Include dependency graph for stabilization_indi_simple.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for stabilization_indi_simple.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | Indi_gains |
| struct | IndiEstimation |
| struct | IndiVariables |
Functions | |
| void | stabilization_indi_init (void) |
| Function that initializes important values upon engaging INDI. More... | |
| void | stabilization_indi_enter (void) |
| Function that resets important values upon engaging INDI. More... | |
| void | stabilization_indi_set_failsafe_setpoint (void) |
| Function that calculates the failsafe setpoint. More... | |
| void | stabilization_indi_set_rpy_setpoint_i (struct Int32Eulers *rpy) |
| Set attitude quaternion setpoint from rpy. More... | |
| void | stabilization_indi_set_earth_cmd_i (struct Int32Vect2 *cmd, int32_t heading) |
| Set attitude setpoint from command in earth axes. More... | |
| void | stabilization_indi_rate_run (struct FloatRates rates_sp, bool in_flight) |
| Does the INDI calculations. More... | |
| void | stabilization_indi_attitude_run (struct Int32Quat quat_sp, bool in_flight) |
| runs stabilization indi More... | |
| void | stabilization_indi_read_rc (bool in_flight, bool in_carefree, bool coordinated_turn) |
| This function reads rc commands. More... | |
Variables | |
| struct Int32Quat | stab_att_sp_quat |
| with INT32_QUAT_FRAC More... | |
| struct Int32Eulers | stab_att_sp_euler |
| with INT32_ANGLE_FRAC More... | |
| struct IndiVariables | indi |
| struct Indi_gains |
Definition at line 41 of file stabilization_indi.h.
Collaboration diagram for Indi_gains:| Data Fields | ||
|---|---|---|
| struct FloatRates | att | |
| struct FloatRates | rate | |
| struct IndiEstimation |
Definition at line 48 of file stabilization_indi_simple.h.
Collaboration diagram for IndiEstimation:| Data Fields | ||
|---|---|---|
| struct FloatRates | g1 | |
| float | g2 | |
| float | mu | |
| Butterworth2LowPass | rate[3] | |
| float | rate_d[3] | |
| float | rate_dd[3] | |
| Butterworth2LowPass | u[3] | |
| float | u_d[3] | |
| float | u_dd[3] | |
| struct IndiVariables |
Definition at line 60 of file stabilization_indi_simple.h.
Collaboration diagram for IndiVariables:| Data Fields | ||
|---|---|---|
| bool | adaptive | Enable adataptive estimation. |
| struct FloatRates | angular_accel_ref | |
| float | attitude_max_yaw_rate | Maximum yaw rate in atttiude control in rad/s. |
| struct FloatRates | du | |
| struct IndiEstimation | est | Estimation parameters for adaptive INDI. |
| struct FloatRates | g1 | |
| float | g2 | |
| struct Indi_gains | gains | |
| float | max_rate | Maximum rate in rate control in rad/s. |
| Butterworth2LowPass | rate[3] | |
| float | rate_d[3] | |
| Butterworth2LowPass | u[3] | |
| struct FloatRates | u_act_dyn | |
| struct FloatRates | u_in | |
| void stabilization_indi_attitude_run | ( | struct Int32Quat | quat_sp, |
| bool | in_flight | ||
| ) |
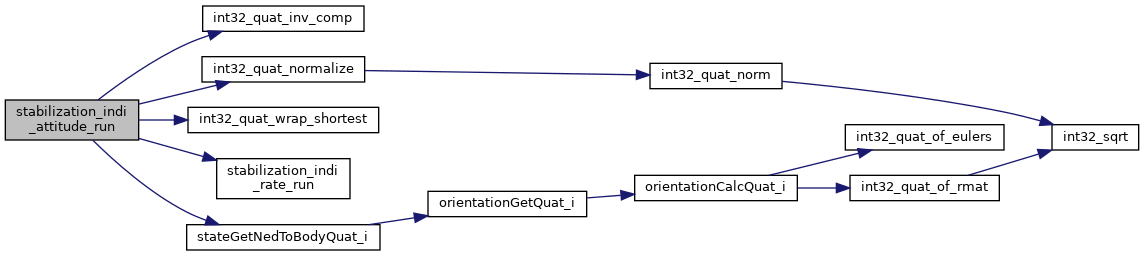
runs stabilization indi
| enable_integrator | |
| rate_control | boolean that determines if we are in rate control or attitude control |
Function that should be called to run the INDI controller
| in_flight | not used |
| rate_control | rate control enabled, otherwise attitude control |
Definition at line 496 of file stabilization_indi.c.
References Indi_gains::att, IndiVariables::gains, indi, indi_gains, indi_thrust_increment_set, int32_quat_inv_comp(), int32_quat_normalize(), int32_quat_wrap_shortest(), FloatRates::p, FloatRates::q, QUAT1_FLOAT_OF_BFP, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, FloatRates::r, Indi_gains::rate, stabilization_indi_rate_run(), and stateGetNedToBodyQuat_i().
Referenced by stabilization_attitude_run().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_enter | ( | void | ) |
Function that resets important values upon engaging INDI.
Don't reset inputs and filters, because it is unlikely to switch stabilization in flight, and there are multiple modes that use (the same) stabilization. Resetting the controller is not so nice when you are flying. FIXME: Ideally we should detect when coming from something that is not INDI
Definition at line 256 of file stabilization_indi.c.
References IndiVariables::angular_accel_ref, ddu_estimation, du_estimation, FLOAT_RATES_ZERO, float_vect_zero(), indi, indi_init_filters(), Int32Eulers::psi, stab_att_sp_euler, stabilization_attitude_get_heading_i(), IndiVariables::u_act_dyn, and IndiVariables::u_in.
Referenced by stabilization_attitude_enter(), and stabilization_rate_enter().
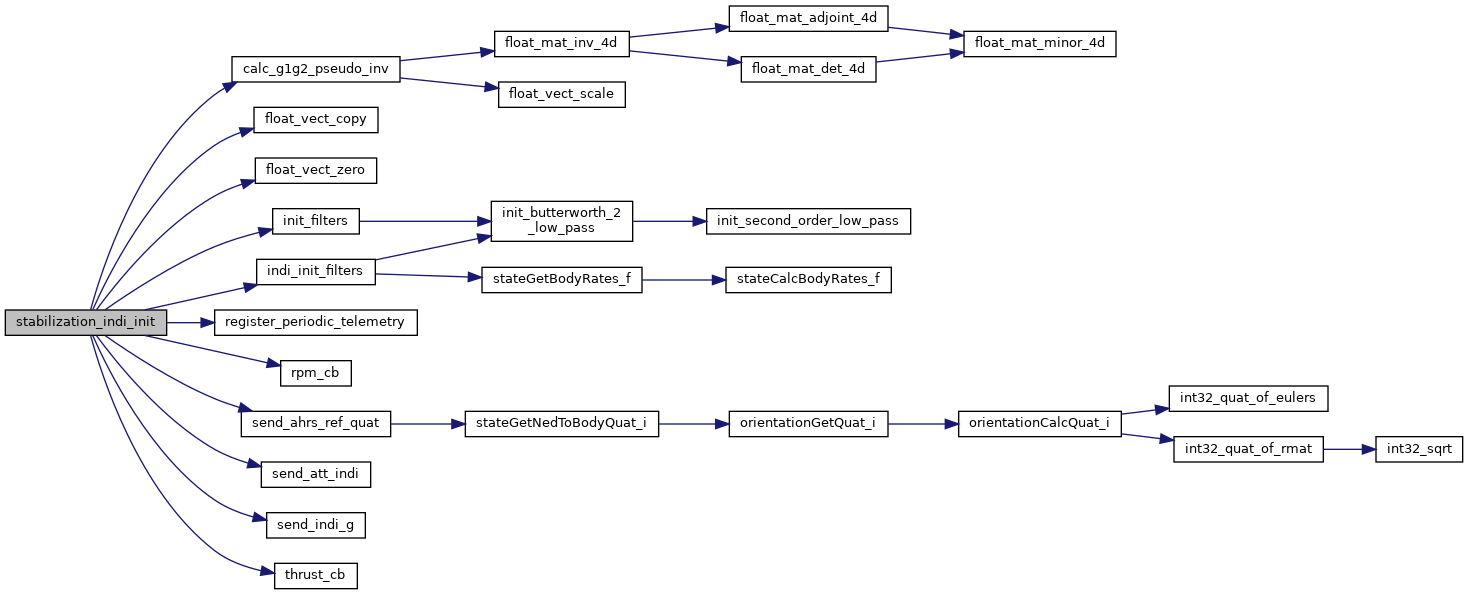
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_init | ( | void | ) |
Function that initializes important values upon engaging INDI.
Definition at line 206 of file stabilization_indi.c.
References act_is_servo, actuator_state_filt_vect, actuator_state_filt_vectd, actuator_state_filt_vectdd, Bwls, calc_g1g2_pseudo_inv(), DefaultPeriodic, estimation_rate_d, estimation_rate_dd, float_vect_copy(), float_vect_zero(), g1, g1_est, g1_init, g1g2, g2, g2_est, g2_init, indi_init_filters(), init_filters(), num_thrusters, register_periodic_telemetry(), rpm_cb(), rpm_ev, RPM_SENSOR_ID, send_ahrs_ref_quat(), send_att_indi(), send_indi_g(), thrust_cb(), thrust_ev, and THRUST_INCREMENT_ID.
Referenced by stabilization_attitude_init(), and stabilization_rate_init().
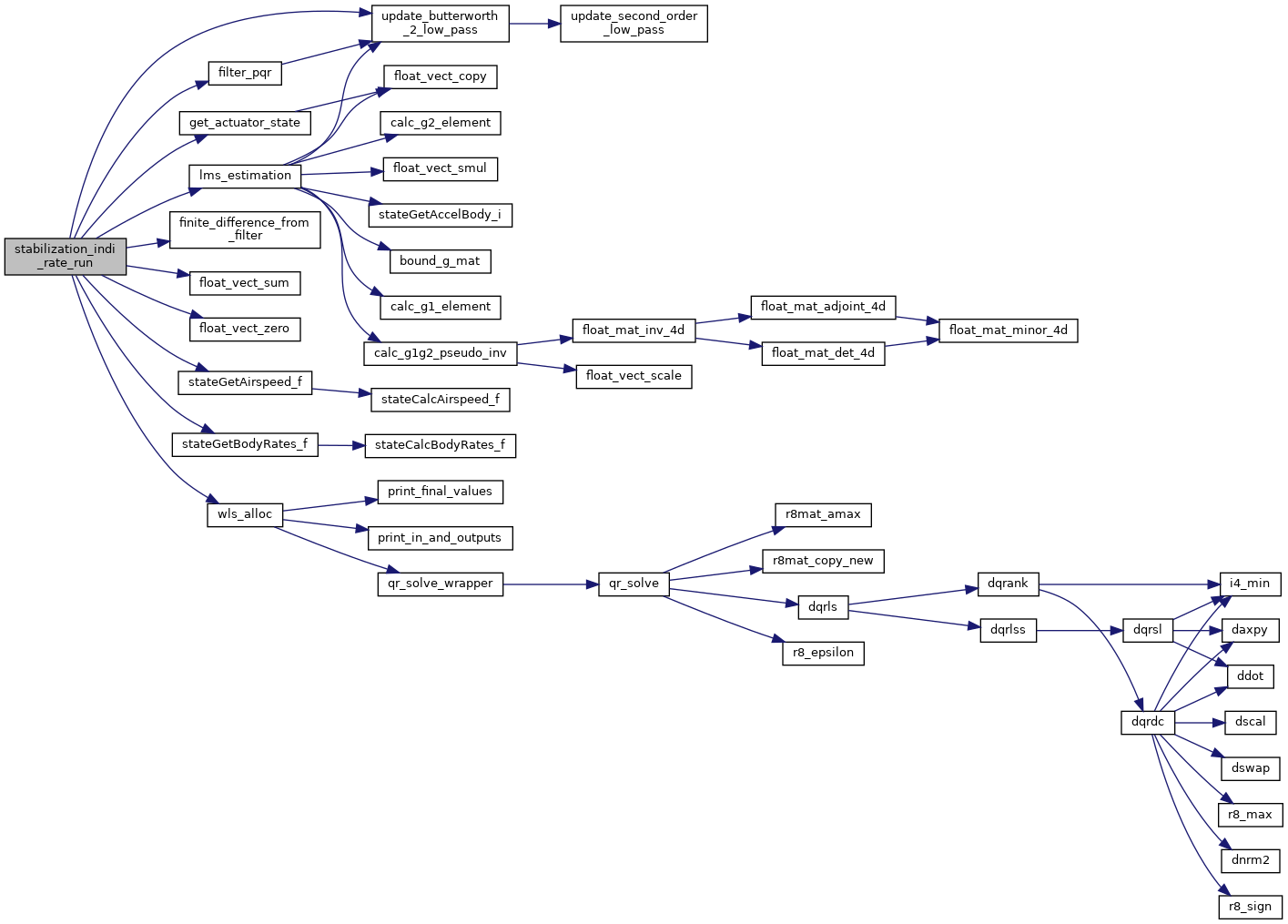
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_rate_run | ( | struct FloatRates | rate_sp, |
| bool | in_flight | ||
| ) |
Does the INDI calculations.
| att_err | attitude error |
| rate_control | boolean that states if we are in rate control or attitude control |
| in_flight | boolean that states if the UAV is in flight or not |
Function that calculates the INDI commands
| indi_commands[] | Array of commands that the function will write to |
| att_err | quaternion attitude error |
Definition at line 347 of file stabilization_indi.c.
References act_is_servo, act_pref, actuator_lowpass_filters, actuator_state, actuator_state_filt_vect, actuator_state_filt_vectd, actuator_state_filt_vectdd, IndiVariables::angular_accel_ref, angular_accel_ref, angular_acceleration, IndiVariables::attitude_max_yaw_rate, Bwls, IndiVariables::du, du_max, du_min, du_pref, estimation_input_lowpass_filters, estimation_output_lowpass_filters, estimation_rate_d, estimation_rate_dd, filter_pqr(), finite_difference_from_filter(), FLOAT_RATES_ZERO, float_vect_sum(), float_vect_zero(), IndiVariables::g1, g1g2_pseudo_inv, IndiVariables::g2, g2, g2_times_du, IndiVariables::gains, get_actuator_state(), guidance_h, GUIDANCE_H_MODE_HOVER, GUIDANCE_H_MODE_NAV, indi, indi_du, INDI_G_SCALING, indi_gains, indi_thrust_increment, indi_thrust_increment_set, indi_u, indi_use_adaptive, indi_v, lms_estimation(), MAX_PPRZ, measurement_lowpass_filters, HorizontalGuidance::mode, num_iter, num_thrusters, SecondOrderLowPass::o, FloatRates::p, FloatRates::q, q_filt, FloatRates::r, r_filt, Indi_gains::rate, IndiVariables::rate, IndiVariables::rate_d, rates_filt_fo, stabilization_cmd, stateGetAirspeed_f(), stateGetBodyRates_f(), IndiVariables::u, IndiVariables::u_act_dyn, IndiVariables::u_in, update_butterworth_2_low_pass(), wls_alloc(), and Wv.
Referenced by stabilization_indi_attitude_run(), and stabilization_rate_run().
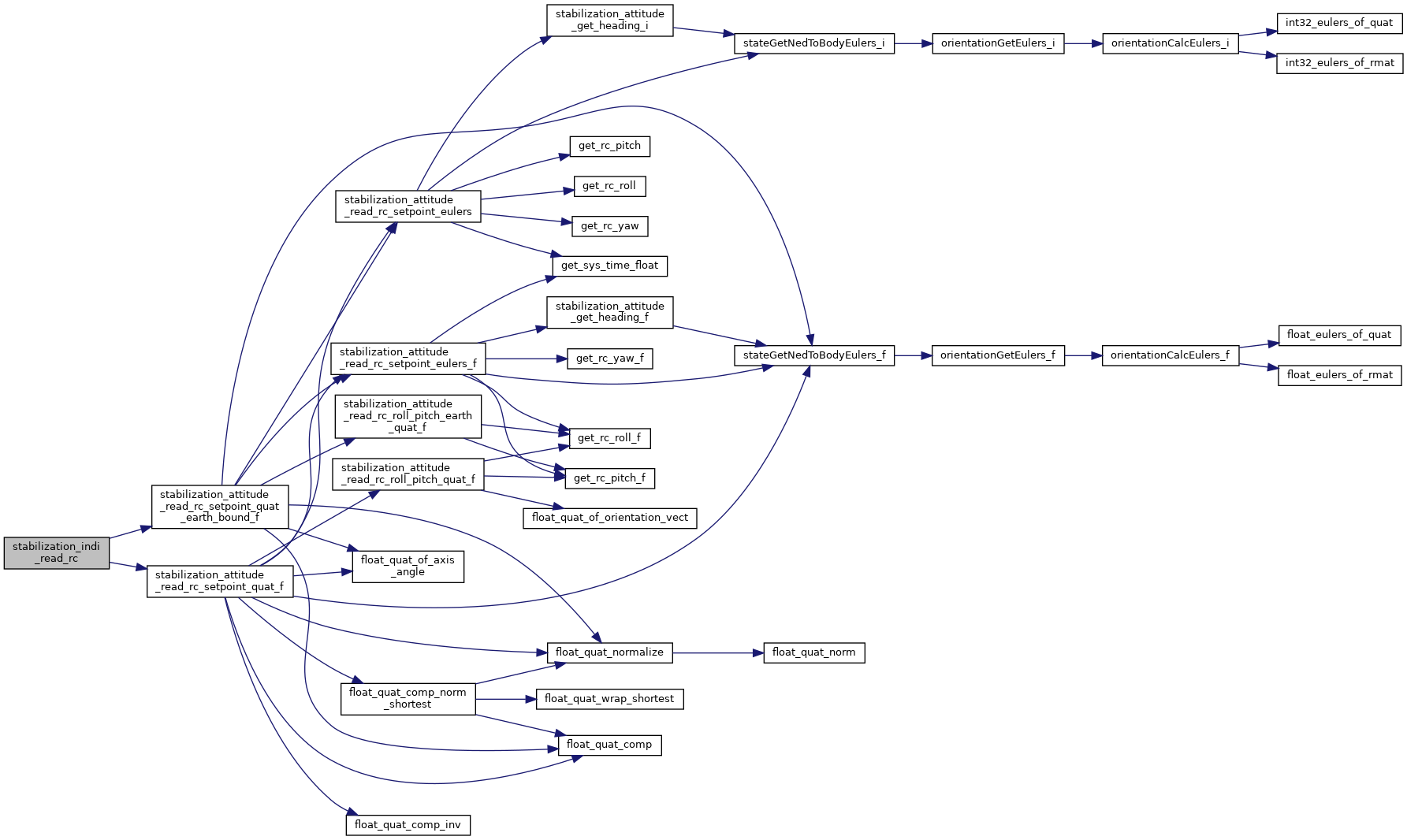
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_read_rc | ( | bool | in_flight, |
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
This function reads rc commands.
| in_flight | boolean that states if the UAV is in flight or not |
Definition at line 525 of file stabilization_indi.c.
References QUAT_BFP_OF_REAL, stab_att_sp_quat, stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), and stabilization_attitude_read_rc_setpoint_quat_f().
Referenced by stabilization_attitude_read_rc().
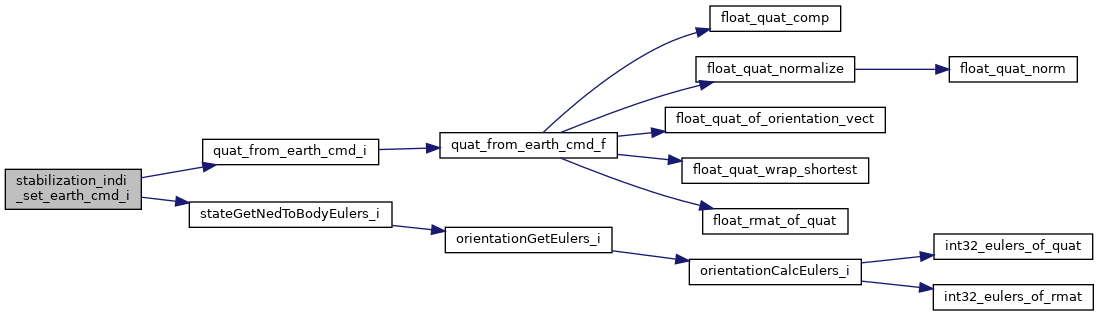
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_set_earth_cmd_i | ( | struct Int32Vect2 * | cmd, |
| int32_t | heading | ||
| ) |
Set attitude setpoint from command in earth axes.
| cmd | 2D command in North East axes |
| heading | Heading of the setpoint |
Function that calculates the setpoint quaternion from a command in earth axes
| cmd | The command in earth axes (North East) |
| heading | The desired heading |
Definition at line 323 of file stabilization_indi.c.
References heading, INT32_TRIG_FRAC, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Eulers::psi, quat_from_earth_cmd_i(), stab_att_sp_euler, stab_att_sp_quat, stateGetNedToBodyEulers_i(), Int32Eulers::theta, Int32Vect2::x, and Int32Vect2::y.
Referenced by stabilization_attitude_set_earth_cmd_i().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_set_failsafe_setpoint | ( | void | ) |
Function that calculates the failsafe setpoint.
Definition at line 294 of file stabilization_indi.c.
References PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, stab_att_sp_quat, and stabilization_attitude_get_heading_i().
Referenced by stabilization_attitude_set_failsafe_setpoint().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_indi_set_rpy_setpoint_i | ( | struct Int32Eulers * | rpy | ) |
Set attitude quaternion setpoint from rpy.
| rpy | rpy from which to calculate quaternion setpoint |
Function that calculates the setpoint quaternion from rpy
| rpy | roll pitch yaw input |
Definition at line 309 of file stabilization_indi.c.
References int32_quat_of_eulers(), stab_att_sp_euler, and stab_att_sp_quat.
Referenced by stabilization_attitude_set_rpy_setpoint_i().
Here is the call graph for this function: Here is the caller graph for this function:| struct IndiVariables indi |
Definition at line 85 of file stabilization_indi_simple.c.
Referenced by indi_init_filters(), lms_estimation(), send_att_indi(), stabilization_indi_attitude_run(), stabilization_indi_enter(), and stabilization_indi_rate_run().
| struct Int32Eulers stab_att_sp_euler |
with INT32_ANGLE_FRAC
Definition at line 45 of file stabilization_attitude_euler_float.c.
Referenced by guidance_flip_run(), guidance_hybrid_set_cmd_i(), ins_ekf2_publish_attitude(), reset_psi_ref_from_body(), send_att(), send_att_ref(), stabilization_attitude_enter(), stabilization_attitude_init(), stabilization_attitude_read_rc(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), stabilization_attitude_read_rc_setpoint_quat_f(), stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_failsafe_setpoint(), stabilization_attitude_set_rpy_setpoint_i(), stabilization_indi_enter(), stabilization_indi_set_earth_cmd_i(), and stabilization_indi_set_rpy_setpoint_i().
| struct Int32Quat stab_att_sp_quat |
with INT32_QUAT_FRAC
Definition at line 127 of file stabilization_attitude_heli_indi.c.
Referenced by guidance_hybrid_set_cmd_i(), guidance_indi_run(), reset_horizontal_vars(), send_ahrs_ref_quat(), stabilization_attitude_init(), stabilization_attitude_read_rc(), stabilization_attitude_run(), stabilization_attitude_set_earth_cmd_i(), stabilization_attitude_set_failsafe_setpoint(), stabilization_attitude_set_rpy_setpoint_i(), stabilization_indi_read_rc(), stabilization_indi_set_earth_cmd_i(), stabilization_indi_set_failsafe_setpoint(), and stabilization_indi_set_rpy_setpoint_i().
 1.8.17
1.8.17