|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "firmwares/rotorcraft/stabilization/stabilization_indi.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_rc_setpoint.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_quat_transformations.h"#include "math/pprz_algebra_float.h"#include "state.h"#include "generated/airframe.h"#include "subsystems/radio_control.h"#include "subsystems/actuators.h"#include "subsystems/abi.h"#include "filters/low_pass_filter.h"#include "wls/wls_alloc.h"#include <stdio.h>#include "subsystems/datalink/telemetry.h" Include dependency graph for stabilization_indi.c:
Include dependency graph for stabilization_indi.c:Go to the source code of this file.
Macros | |
| #define | INDI_ALLOWED_G_FACTOR 2.0 |
Functions | |
| static void | lms_estimation (void) |
| Function that estimates the control effectiveness of each actuator online. More... | |
| static void | get_actuator_state (void) |
| Function that tries to get actuator feedback. More... | |
| static void | calc_g1_element (float dx_error, int8_t i, int8_t j, float mu_extra) |
| static void | calc_g2_element (float dx_error, int8_t j, float mu_extra) |
| static void | calc_g1g2_pseudo_inv (void) |
| Function that calculates the pseudo-inverse of (G1+G2). More... | |
| static void | bound_g_mat (void) |
| static void | rpm_cb (uint8_t sender_id, uint16_t *rpm, uint8_t num_act) |
| static void | thrust_cb (uint8_t sender_id, float thrust_increment) |
| void | init_filters (void) |
| Function that resets the filters to zeros. More... | |
| static void | send_indi_g (struct transport_tx *trans, struct link_device *dev) |
| static void | send_ahrs_ref_quat (struct transport_tx *trans, struct link_device *dev) |
| void | stabilization_indi_init (void) |
| Function that initializes important values upon engaging INDI. More... | |
| void | stabilization_indi_enter (void) |
| Function that resets important values upon engaging INDI. More... | |
| void | stabilization_indi_set_failsafe_setpoint (void) |
| Function that calculates the failsafe setpoint. More... | |
| void | stabilization_indi_set_rpy_setpoint_i (struct Int32Eulers *rpy) |
| void | stabilization_indi_set_earth_cmd_i (struct Int32Vect2 *cmd, int32_t heading) |
| void | stabilization_indi_rate_run (struct FloatRates rate_sp, bool in_flight) |
| void | stabilization_indi_attitude_run (struct Int32Quat quat_sp, bool in_flight) |
| void | stabilization_indi_read_rc (bool in_flight, bool in_carefree, bool coordinated_turn) |
| static void | rpm_cb (uint8_t sender_id, uint16_t UNUSED *rpm, uint8_t UNUSED num_act) |
| static void | thrust_cb (uint8_t UNUSED sender_id, float thrust_increment) |
| ABI callback that obtains the thrust increment from guidance INDI. More... | |
Variables | |
| float | du_min [INDI_NUM_ACT] |
| float | du_max [INDI_NUM_ACT] |
| float | du_pref [INDI_NUM_ACT] |
| float | indi_v [INDI_OUTPUTS] |
| float * | Bwls [INDI_OUTPUTS] |
| int | num_iter = 0 |
| int32_t | stabilization_att_indi_cmd [COMMANDS_NB] |
| struct Indi_gains | indi_gains |
| bool | indi_use_adaptive = false |
| bool | act_is_servo [INDI_NUM_ACT] = {0} |
| float | act_pref [INDI_NUM_ACT] = {0.0} |
| float | act_dyn [INDI_NUM_ACT] = STABILIZATION_INDI_ACT_DYN |
| static float | Wv [INDI_OUTPUTS] = {1000, 1000, 1, 100} |
| float | actuator_state_filt_vect [INDI_NUM_ACT] |
| struct FloatRates | angular_accel_ref = {0., 0., 0.} |
| float | angular_acceleration [3] = {0., 0., 0.} |
| float | actuator_state [INDI_NUM_ACT] |
| float | indi_u [INDI_NUM_ACT] |
| float | indi_du [INDI_NUM_ACT] |
| float | g2_times_du |
| float | q_filt = 0.0 |
| float | r_filt = 0.0 |
| float | g1g2_trans_mult [INDI_OUTPUTS][INDI_OUTPUTS] |
| float | g1g2inv [INDI_OUTPUTS][INDI_OUTPUTS] |
| float | actuator_state_filt_vectd [INDI_NUM_ACT] |
| float | actuator_state_filt_vectdd [INDI_NUM_ACT] |
| float | estimation_rate_d [INDI_NUM_ACT] |
| float | estimation_rate_dd [INDI_NUM_ACT] |
| float | du_estimation [INDI_NUM_ACT] |
| float | ddu_estimation [INDI_NUM_ACT] |
| float | mu1 [INDI_OUTPUTS] = {0.00001, 0.00001, 0.000003, 0.000002} |
| float | mu2 = 0.002 |
| float | act_obs [INDI_NUM_ACT] |
| int32_t | num_thrusters |
| struct Int32Eulers | stab_att_sp_euler |
| with INT32_ANGLE_FRAC More... | |
| struct Int32Quat | stab_att_sp_quat |
| with INT32_QUAT_FRAC More... | |
| abi_event | rpm_ev |
| abi_event | thrust_ev |
| float | indi_thrust_increment |
| bool | indi_thrust_increment_set = false |
| float | g1g2_pseudo_inv [INDI_NUM_ACT][INDI_OUTPUTS] |
| float | g2 [INDI_NUM_ACT] = STABILIZATION_INDI_G2 |
| float | g1 [INDI_OUTPUTS][INDI_NUM_ACT] |
| float | g1g2 [INDI_OUTPUTS][INDI_NUM_ACT] |
| float | g1_est [INDI_OUTPUTS][INDI_NUM_ACT] |
| float | g2_est [INDI_NUM_ACT] |
| float | g1_init [INDI_OUTPUTS][INDI_NUM_ACT] |
| float | g2_init [INDI_NUM_ACT] |
| Butterworth2LowPass | actuator_lowpass_filters [INDI_NUM_ACT] |
| Butterworth2LowPass | estimation_input_lowpass_filters [INDI_NUM_ACT] |
| Butterworth2LowPass | measurement_lowpass_filters [3] |
| Butterworth2LowPass | estimation_output_lowpass_filters [3] |
| Butterworth2LowPass | acceleration_lowpass_filter |
| struct FloatVect3 | body_accel_f |
| #define INDI_ALLOWED_G_FACTOR 2.0 |
Definition at line 49 of file stabilization_indi.c.
|
static |
Definition at line 748 of file stabilization_indi.c.
References g1_est, g1_init, g2_est, g2_init, and INDI_ALLOWED_G_FACTOR.
Referenced by lms_estimation().
Here is the caller graph for this function:| ddx_error | error in output change |
| i | row of the matrix element |
| j | column of the matrix element |
| mu | learning rate |
Function that calculates an element of the G1 matrix. The elements are stored in a different matrix, because the old matrix is necessary to caclulate more elements.
Definition at line 579 of file stabilization_indi.c.
References du_estimation, and g1_est.
Referenced by lms_estimation().
Here is the caller graph for this function:
|
static |
Function that calculates the pseudo-inverse of (G1+G2).
Definition at line 674 of file stabilization_indi.c.
References float_mat_inv_4d(), float_vect_scale(), g1, g1g2, g1g2_pseudo_inv, g1g2_trans_mult, g1g2inv, g2, and INDI_G_SCALING.
Referenced by lms_estimation(), and stabilization_indi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
| ddx_error | error in output change |
| j | column of the matrix element |
| mu | learning rate |
Function that calculates an element of the G2 matrix. The elements are stored in a different matrix, because the old matrix is necessary to caclulate more elements.
Definition at line 593 of file stabilization_indi.c.
References ddu_estimation, and g2_est.
Referenced by lms_estimation().
Here is the caller graph for this function:
|
static |
Function that tries to get actuator feedback.
If this is not available it will use a first order filter to approximate the actuator state. It is also possible to model rate limits (unit: PPRZ/loop cycle)
Definition at line 543 of file stabilization_indi.c.
References act_dyn, act_obs, actuator_state, float_vect_copy(), indi_u, and UNUSED.
Referenced by stabilization_indi_rate_run().
Here is the call graph for this function: Here is the caller graph for this function:| void init_filters | ( | void | ) |
Function that resets the filters to zeros.
Definition at line 268 of file stabilization_indi.c.
References acceleration_lowpass_filter, actuator_lowpass_filters, estimation_input_lowpass_filters, estimation_output_lowpass_filters, init_butterworth_2_low_pass(), measurement_lowpass_filters, STABILIZATION_INDI_ESTIMATION_FILT_CUTOFF, and STABILIZATION_INDI_FILT_CUTOFF.
Referenced by stabilization_indi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
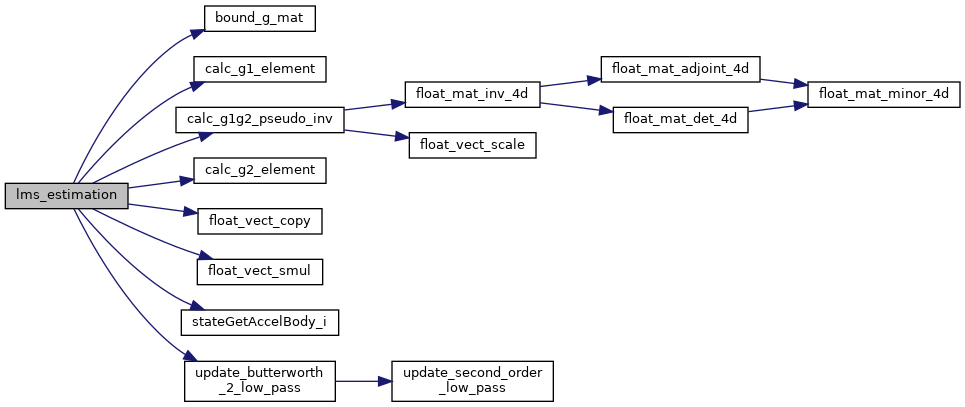
Function that estimates the control effectiveness of each actuator online.
It is assumed that disturbances do not play a large role. All elements of the G1 and G2 matrices are be estimated.
Definition at line 603 of file stabilization_indi.c.
References acceleration_lowpass_filter, ACCELS_FLOAT_OF_BFP, actuator_state_filt_vectd, actuator_state_filt_vectdd, body_accel_f, bound_g_mat(), calc_g1_element(), calc_g1g2_pseudo_inv(), calc_g2_element(), ddu_estimation, du_estimation, estimation_rate_dd, float_vect_copy(), float_vect_smul(), g1, g1_est, g2, g2_est, mu1, mu2, SecondOrderLowPass::o, stateGetAccelBody_i(), update_butterworth_2_low_pass(), and FloatVect3::z.
Referenced by stabilization_indi_rate_run().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 727 of file stabilization_indi.c.
|
static |
Definition at line 188 of file stabilization_indi.c.
References dev, Int32Quat::qi, Int32Quat::qx, Int32Quat::qy, Int32Quat::qz, stab_att_sp_quat, and stateGetNedToBodyQuat_i().
Referenced by stabilization_indi_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 179 of file stabilization_indi.c.
References dev, g1_est, and g2_est.
Referenced by stabilization_indi_init().
Here is the caller graph for this function:| void stabilization_indi_attitude_run | ( | struct Int32Quat | quat_sp, |
| bool | in_flight | ||
| ) |
| enable_integrator | |
| rate_control | boolean that determines if we are in rate control or attitude control |
Function that should be called to run the INDI controller
Definition at line 496 of file stabilization_indi.c.
Referenced by stabilization_attitude_run().
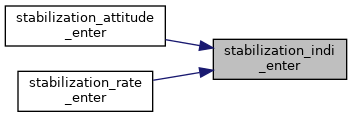
Here is the caller graph for this function:| void stabilization_indi_enter | ( | void | ) |
Function that resets important values upon engaging INDI.
Don't reset inputs and filters, because it is unlikely to switch stabilization in flight, and there are multiple modes that use (the same) stabilization. Resetting the controller is not so nice when you are flying. FIXME: Ideally we should detect when coming from something that is not INDI
Definition at line 256 of file stabilization_indi.c.
Referenced by stabilization_attitude_enter(), and stabilization_rate_enter().
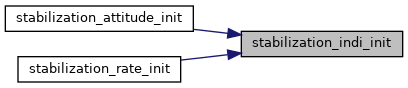
Here is the caller graph for this function:| void stabilization_indi_init | ( | void | ) |
Function that initializes important values upon engaging INDI.
Definition at line 206 of file stabilization_indi.c.
Referenced by stabilization_attitude_init(), and stabilization_rate_init().
Here is the caller graph for this function:| void stabilization_indi_rate_run | ( | struct FloatRates | rate_sp, |
| bool | in_flight | ||
| ) |
| att_err | attitude error |
| rate_control | boolean that states if we are in rate control or attitude control |
| in_flight | boolean that states if the UAV is in flight or not |
Function that calculates the INDI commands
Definition at line 347 of file stabilization_indi.c.
Referenced by stabilization_indi_attitude_run(), and stabilization_rate_run().
Here is the caller graph for this function:| void stabilization_indi_read_rc | ( | bool | in_flight, |
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
Definition at line 525 of file stabilization_indi.c.
Referenced by stabilization_attitude_read_rc().
Here is the caller graph for this function:| void stabilization_indi_set_earth_cmd_i | ( | struct Int32Vect2 * | cmd, |
| int32_t | heading | ||
| ) |
| cmd | 2D command in North East axes |
| heading | Heading of the setpoint |
Function that calculates the setpoint quaternion from a command in earth axes
Definition at line 323 of file stabilization_indi.c.
Referenced by stabilization_attitude_set_earth_cmd_i().
Here is the caller graph for this function:| void stabilization_indi_set_failsafe_setpoint | ( | void | ) |
Function that calculates the failsafe setpoint.
Definition at line 294 of file stabilization_indi.c.
Referenced by stabilization_attitude_set_failsafe_setpoint().
Here is the caller graph for this function:| void stabilization_indi_set_rpy_setpoint_i | ( | struct Int32Eulers * | rpy | ) |
| rpy | rpy from which to calculate quaternion setpoint |
Function that calculates the setpoint quaternion from rpy
Definition at line 309 of file stabilization_indi.c.
Referenced by stabilization_attitude_set_rpy_setpoint_i().
Here is the caller graph for this function:
|
static |
ABI callback that obtains the thrust increment from guidance INDI.
Definition at line 742 of file stabilization_indi.c.
References indi_thrust_increment, and indi_thrust_increment_set.
| Butterworth2LowPass acceleration_lowpass_filter |
Definition at line 171 of file stabilization_indi.c.
Referenced by init_filters(), and lms_estimation().
| float act_dyn[INDI_NUM_ACT] = STABILIZATION_INDI_ACT_DYN |
Definition at line 103 of file stabilization_indi.c.
Referenced by get_actuator_state().
| bool act_is_servo[INDI_NUM_ACT] = {0} |
Definition at line 92 of file stabilization_indi.c.
Referenced by stabilization_indi_init(), and stabilization_indi_rate_run().
| float act_obs[INDI_NUM_ACT] |
Definition at line 140 of file stabilization_indi.c.
Referenced by get_actuator_state(), and rpm_cb().
| float act_pref[INDI_NUM_ACT] = {0.0} |
Definition at line 100 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| Butterworth2LowPass actuator_lowpass_filters[INDI_NUM_ACT] |
Definition at line 167 of file stabilization_indi.c.
Referenced by init_filters(), and stabilization_indi_rate_run().
| float actuator_state[INDI_NUM_ACT] |
Definition at line 116 of file stabilization_indi.c.
Referenced by get_actuator_state(), and stabilization_indi_rate_run().
| float actuator_state_filt_vect[INDI_NUM_ACT] |
Definition at line 113 of file stabilization_indi.c.
Referenced by ctrl_eff_scheduling_periodic(), ctrl_eff_scheduling_periodic_b(), stabilization_indi_init(), and stabilization_indi_rate_run().
| float actuator_state_filt_vectd[INDI_NUM_ACT] |
Definition at line 127 of file stabilization_indi.c.
Referenced by lms_estimation(), stabilization_indi_init(), and stabilization_indi_rate_run().
| float actuator_state_filt_vectdd[INDI_NUM_ACT] |
Definition at line 128 of file stabilization_indi.c.
Referenced by lms_estimation(), stabilization_indi_init(), and stabilization_indi_rate_run().
| struct FloatRates angular_accel_ref = {0., 0., 0.} |
Definition at line 114 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| float angular_acceleration[3] = {0., 0., 0.} |
Definition at line 115 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| struct FloatVect3 body_accel_f |
Definition at line 173 of file stabilization_indi.c.
Referenced by lms_estimation().
| float* Bwls[INDI_OUTPUTS] |
Definition at line 55 of file stabilization_indi.c.
Referenced by ctrl_eff_scheduling_periodic(), stabilization_indi_init(), and stabilization_indi_rate_run().
| float ddu_estimation[INDI_NUM_ACT] |
Definition at line 132 of file stabilization_indi.c.
Referenced by calc_g2_element(), lms_estimation(), and stabilization_indi_enter().
| float du_estimation[INDI_NUM_ACT] |
Definition at line 131 of file stabilization_indi.c.
Referenced by calc_g1_element(), lms_estimation(), and stabilization_indi_enter().
| float du_max[INDI_NUM_ACT] |
Definition at line 52 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| float du_min[INDI_NUM_ACT] |
Definition at line 51 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| float du_pref[INDI_NUM_ACT] |
Definition at line 53 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| Butterworth2LowPass estimation_input_lowpass_filters[INDI_NUM_ACT] |
Definition at line 168 of file stabilization_indi.c.
Referenced by init_filters(), and stabilization_indi_rate_run().
| Butterworth2LowPass estimation_output_lowpass_filters[3] |
Definition at line 170 of file stabilization_indi.c.
Referenced by init_filters(), and stabilization_indi_rate_run().
| float estimation_rate_d[INDI_NUM_ACT] |
Definition at line 129 of file stabilization_indi.c.
Referenced by stabilization_indi_init(), and stabilization_indi_rate_run().
| float estimation_rate_dd[INDI_NUM_ACT] |
Definition at line 130 of file stabilization_indi.c.
Referenced by lms_estimation(), stabilization_indi_init(), and stabilization_indi_rate_run().
| float g1[INDI_OUTPUTS][INDI_NUM_ACT] |
Definition at line 158 of file stabilization_indi.c.
Referenced by calc_g1g2_pseudo_inv(), gain_scheduling_periodic(), lms_estimation(), and stabilization_indi_init().
| float g1_est[INDI_OUTPUTS][INDI_NUM_ACT] |
Definition at line 162 of file stabilization_indi.c.
Referenced by bound_g_mat(), calc_g1_element(), lms_estimation(), send_indi_g(), and stabilization_indi_init().
| float g1_init[INDI_OUTPUTS][INDI_NUM_ACT] |
Definition at line 164 of file stabilization_indi.c.
Referenced by bound_g_mat(), and stabilization_indi_init().
| float g1g2[INDI_OUTPUTS][INDI_NUM_ACT] |
Definition at line 161 of file stabilization_indi.c.
Referenced by calc_g1g2_pseudo_inv(), ctrl_eff_scheduling_periodic_a(), ctrl_eff_scheduling_periodic_b(), and stabilization_indi_init().
| float g1g2_pseudo_inv[INDI_NUM_ACT][INDI_OUTPUTS] |
Definition at line 156 of file stabilization_indi.c.
Referenced by calc_g1g2_pseudo_inv(), and stabilization_indi_rate_run().
| float g1g2_trans_mult[INDI_OUTPUTS][INDI_OUTPUTS] |
Definition at line 125 of file stabilization_indi.c.
Referenced by calc_g1g2_pseudo_inv().
| float g1g2inv[INDI_OUTPUTS][INDI_OUTPUTS] |
Definition at line 126 of file stabilization_indi.c.
Referenced by calc_g1g2_pseudo_inv().
| float g2[INDI_NUM_ACT] = STABILIZATION_INDI_G2 |
Definition at line 157 of file stabilization_indi.c.
Referenced by calc_g1g2_pseudo_inv(), gain_scheduling_periodic(), lms_estimation(), stabilization_indi_init(), and stabilization_indi_rate_run().
| float g2_est[INDI_NUM_ACT] |
Definition at line 163 of file stabilization_indi.c.
Referenced by bound_g_mat(), calc_g2_element(), lms_estimation(), send_indi_g(), and stabilization_indi_init().
| float g2_init[INDI_NUM_ACT] |
Definition at line 165 of file stabilization_indi.c.
Referenced by bound_g_mat(), and stabilization_indi_init().
| float g2_times_du |
Definition at line 119 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| float indi_du[INDI_NUM_ACT] |
Definition at line 118 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| struct Indi_gains indi_gains |
Definition at line 66 of file stabilization_indi.c.
Referenced by ctrl_eff_scheduling_periodic_b(), stabilization_indi_attitude_run(), and stabilization_indi_rate_run().
| float indi_thrust_increment |
Definition at line 153 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run(), and thrust_cb().
| bool indi_thrust_increment_set = false |
Definition at line 154 of file stabilization_indi.c.
Referenced by stabilization_indi_attitude_run(), stabilization_indi_rate_run(), and thrust_cb().
| float indi_u[INDI_NUM_ACT] |
Definition at line 117 of file stabilization_indi.c.
Referenced by get_actuator_state(), and stabilization_indi_rate_run().
| bool indi_use_adaptive = false |
Definition at line 82 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| float indi_v[INDI_OUTPUTS] |
Definition at line 54 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| Butterworth2LowPass measurement_lowpass_filters[3] |
Definition at line 169 of file stabilization_indi.c.
Referenced by init_filters(), and stabilization_indi_rate_run().
| float mu1[INDI_OUTPUTS] = {0.00001, 0.00001, 0.000003, 0.000002} |
Definition at line 135 of file stabilization_indi.c.
Referenced by lms_estimation().
| float mu2 = 0.002 |
Definition at line 137 of file stabilization_indi.c.
Referenced by lms_estimation().
| int num_iter = 0 |
Definition at line 56 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| int32_t num_thrusters |
Definition at line 143 of file stabilization_indi.c.
Referenced by stabilization_indi_init(), and stabilization_indi_rate_run().
| float q_filt = 0.0 |
Definition at line 121 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| float r_filt = 0.0 |
Definition at line 122 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run().
| abi_event rpm_ev |
Definition at line 148 of file stabilization_indi.c.
Referenced by stabilization_indi_init().
| struct Int32Eulers stab_att_sp_euler |
with INT32_ANGLE_FRAC
Definition at line 145 of file stabilization_indi.c.
Referenced by stabilization_indi_enter(), stabilization_indi_set_earth_cmd_i(), and stabilization_indi_set_rpy_setpoint_i().
| struct Int32Quat stab_att_sp_quat |
with INT32_QUAT_FRAC
Definition at line 146 of file stabilization_indi.c.
Referenced by send_ahrs_ref_quat(), stabilization_indi_read_rc(), stabilization_indi_set_earth_cmd_i(), stabilization_indi_set_failsafe_setpoint(), and stabilization_indi_set_rpy_setpoint_i().
| int32_t stabilization_att_indi_cmd[COMMANDS_NB] |
Definition at line 65 of file stabilization_indi.c.
| abi_event thrust_ev |
Definition at line 151 of file stabilization_indi.c.
Referenced by stabilization_indi_init().
|
static |
Definition at line 109 of file stabilization_indi.c.
Referenced by stabilization_indi_rate_run(), and wls_alloc().
 1.8.17
1.8.17