|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
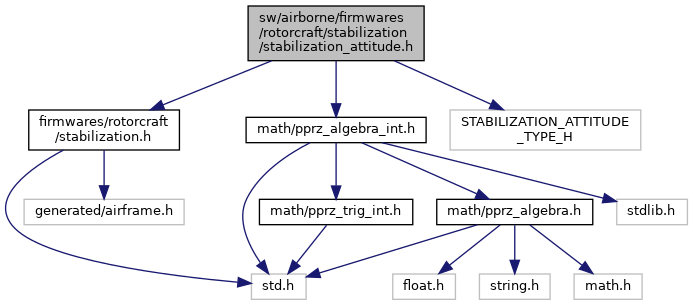
#include "firmwares/rotorcraft/stabilization.h"#include "math/pprz_algebra_int.h"#include <STABILIZATION_ATTITUDE_TYPE_H> Include dependency graph for stabilization_attitude.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for stabilization_attitude.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | stabilization_attitude_init (void) |
| stabilization_attitude_init More... | |
| void | stabilization_attitude_read_rc (bool in_flight, bool in_carefree, bool coordinated_turn) |
| void | stabilization_attitude_enter (void) |
| void | stabilization_attitude_set_failsafe_setpoint (void) |
| void | stabilization_attitude_set_rpy_setpoint_i (struct Int32Eulers *rpy) |
| void | stabilization_attitude_set_earth_cmd_i (struct Int32Vect2 *cmd, int32_t heading) |
| void | stabilization_attitude_run (bool in_flight) |
General attitude stabilization interface for rotorcrafts. The actual implementation is automatically included.
Definition in file stabilization_attitude.h.
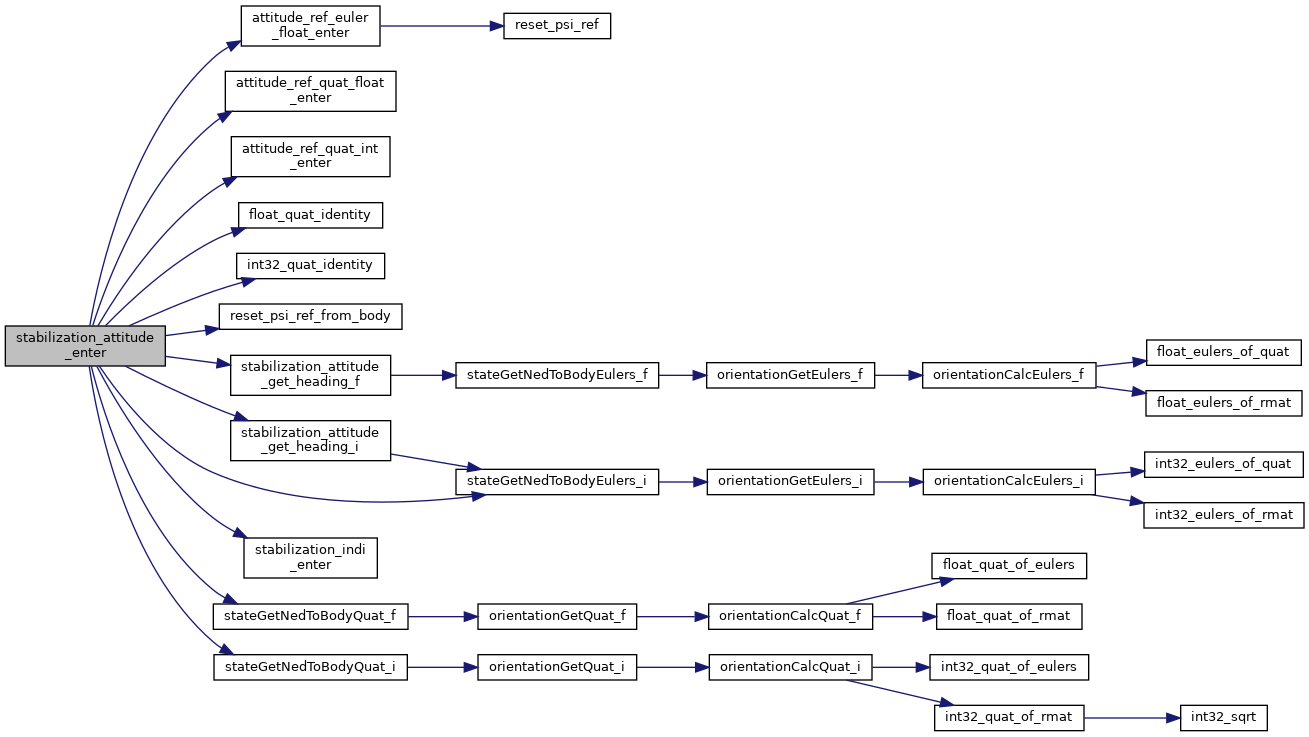
| void stabilization_attitude_enter | ( | void | ) |
Definition at line 136 of file stabilization_attitude_euler_float.c.
References att_ref_euler_f, att_ref_quat_f, att_ref_quat_i, attitude_ref_euler_float_enter(), attitude_ref_quat_float_enter(), attitude_ref_quat_int_enter(), FLOAT_EULERS_ZERO, float_quat_identity(), int32_quat_identity(), INT_EULERS_ZERO, FloatEulers::psi, Int32Eulers::psi, reset_psi_ref_from_body(), stab_att_sp_euler, stabilization_att_sum_err, stabilization_att_sum_err_quat, stabilization_attitude_get_heading_f(), stabilization_attitude_get_heading_i(), stabilization_indi_enter(), stateGetNedToBodyEulers_i(), stateGetNedToBodyQuat_f(), and stateGetNedToBodyQuat_i().
Referenced by guidance_h_mode_changed(), and ins_ekf2_publish_attitude().
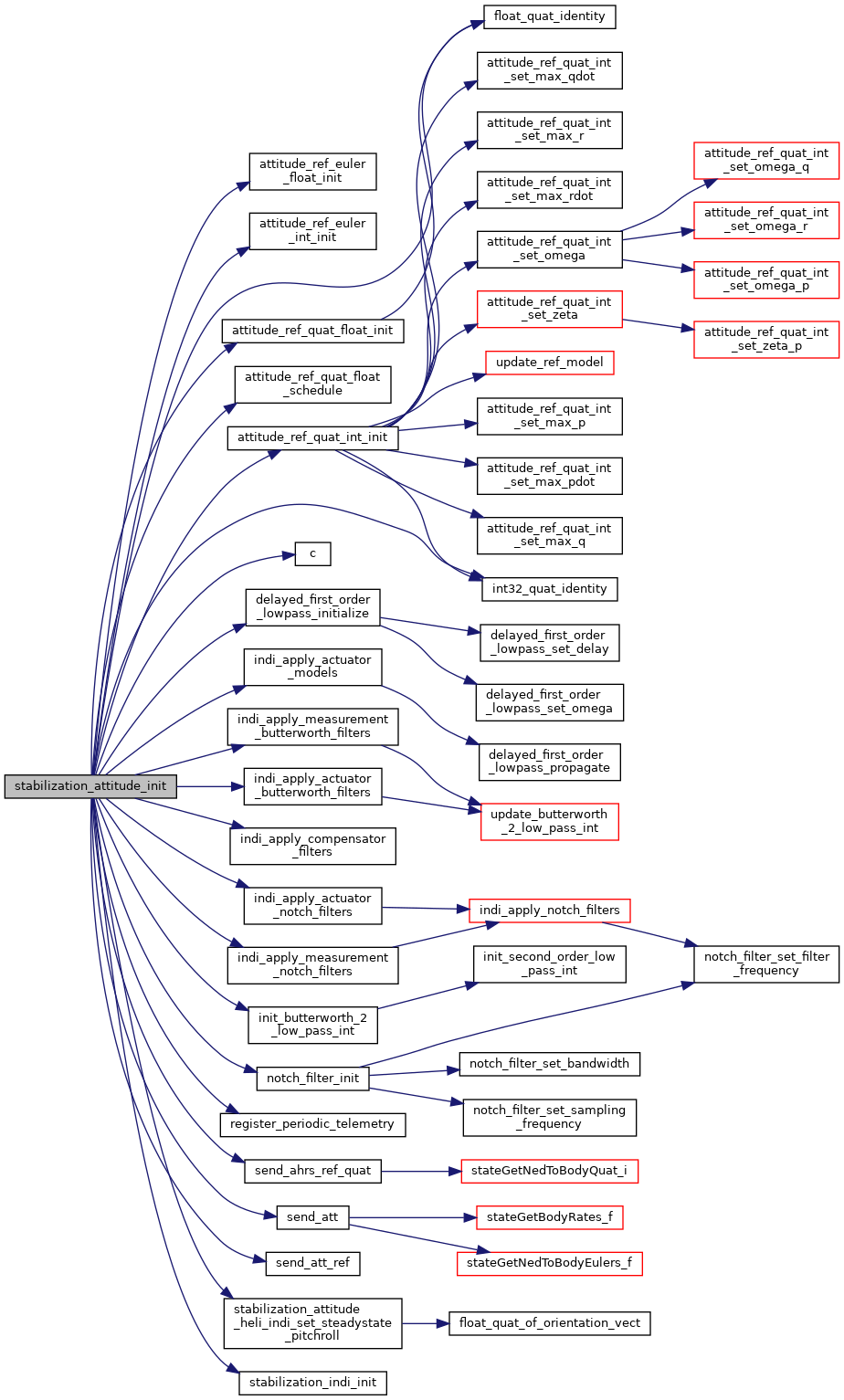
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_init | ( | void | ) |
stabilization_attitude_init
Initialize the heli indi attitude controller.
Definition at line 98 of file stabilization_attitude_euler_float.c.
References actuator_lowpass_filters, actuator_model, actuator_notchfilter, delayed_first_order_lowpass_filter_t::alpha, alpha_yaw_dec, alpha_yaw_inc, ANGLE_BFP_OF_REAL, att_ref_euler_f, att_ref_euler_i, att_ref_quat_f, att_ref_quat_i, attitude_ref_euler_float_init(), attitude_ref_euler_int_init(), attitude_ref_quat_float_init(), attitude_ref_quat_float_schedule(), attitude_ref_quat_int_init(), body_rate_d, c(), Int32AttitudeGains::d, FloatAttitudeGains::d, Int32AttitudeGains::dd, FloatAttitudeGains::dd, DefaultPeriodic, DELAYED_FIRST_ORDER_LOWPASS_FILTER_FILTER_ALPHA_SHIFT, delayed_first_order_lowpass_initialize(), FALSE, Int32AttitudeGains::ffd, FLOAT_EULERS_ZERO, float_quat_identity(), FLOAT_RATES_ZERO, heli_indi_ctl, Int32AttitudeGains::i, FloatAttitudeGains::i, indi_apply_actuator_butterworth_filters(), indi_apply_actuator_models(), indi_apply_actuator_notch_filters(), indi_apply_compensator_filters(), indi_apply_measurement_butterworth_filters(), indi_apply_measurement_notch_filters(), INDI_PITCH, INDI_ROLL, INDI_THRUST, INDI_YAW, init_butterworth_2_low_pass_int(), int32_quat_identity(), INT_EULERS_ZERO, INVG_00, INVG_11, INVG_22, INVG_33, last_body_rate, MAX_PPRZ, measurement_lowpass_filters, measurement_notchfilter, notch_filter_init(), Int32AttitudeGains::p, FloatAttitudeGains::p, p, phi_ddgain, phi_dgain, phi_dgain_d, phi_igain, phi_pgain, psi_ddgain, psi_dgain, psi_dgain_d, psi_igain, psi_pgain, register_periodic_telemetry(), send_ahrs_ref_quat(), send_att(), send_att_ref(), stab_att_sp_euler, stab_att_sp_quat, stabilization_att_sum_err, stabilization_att_sum_err_quat, STABILIZATION_ATTITUDE_GAIN_IDX_DEFAULT, STABILIZATION_ATTITUDE_GAIN_NB, STABILIZATION_ATTITUDE_HELI_INDI_BUTTERW_CUTOFF_PITCH, STABILIZATION_ATTITUDE_HELI_INDI_BUTTERW_CUTOFF_ROLL, STABILIZATION_ATTITUDE_HELI_INDI_BUTTERW_CUTOFF_THRUST, STABILIZATION_ATTITUDE_HELI_INDI_BUTTERW_CUTOFF_YAW, STABILIZATION_ATTITUDE_HELI_INDI_NOTCHFILT_BW_PITCH, STABILIZATION_ATTITUDE_HELI_INDI_NOTCHFILT_BW_ROLL, STABILIZATION_ATTITUDE_HELI_INDI_NOTCHFILT_BW_THRUST, STABILIZATION_ATTITUDE_HELI_INDI_NOTCHFILT_BW_YAW, STABILIZATION_ATTITUDE_HELI_INDI_PITCH_COMMAND_ROTATION, STABILIZATION_ATTITUDE_HELI_INDI_ROLL_COMMAND_ROTATION, stabilization_attitude_heli_indi_set_steadystate_pitchroll(), STABILIZATION_ATTITUDE_HELI_INDI_STEADY_STATE_PITCH, STABILIZATION_ATTITUDE_HELI_INDI_STEADY_STATE_ROLL, STABILIZATION_ATTITUDE_PHI_FFDGAIN, STABILIZATION_ATTITUDE_PSI_FFDGAIN, STABILIZATION_ATTITUDE_THETA_FFDGAIN, stabilization_gains, stabilization_indi_init(), theta_ddgain, theta_dgain, theta_dgain_d, theta_igain, theta_pgain, TRUE, and VECT3_ASSIGN.
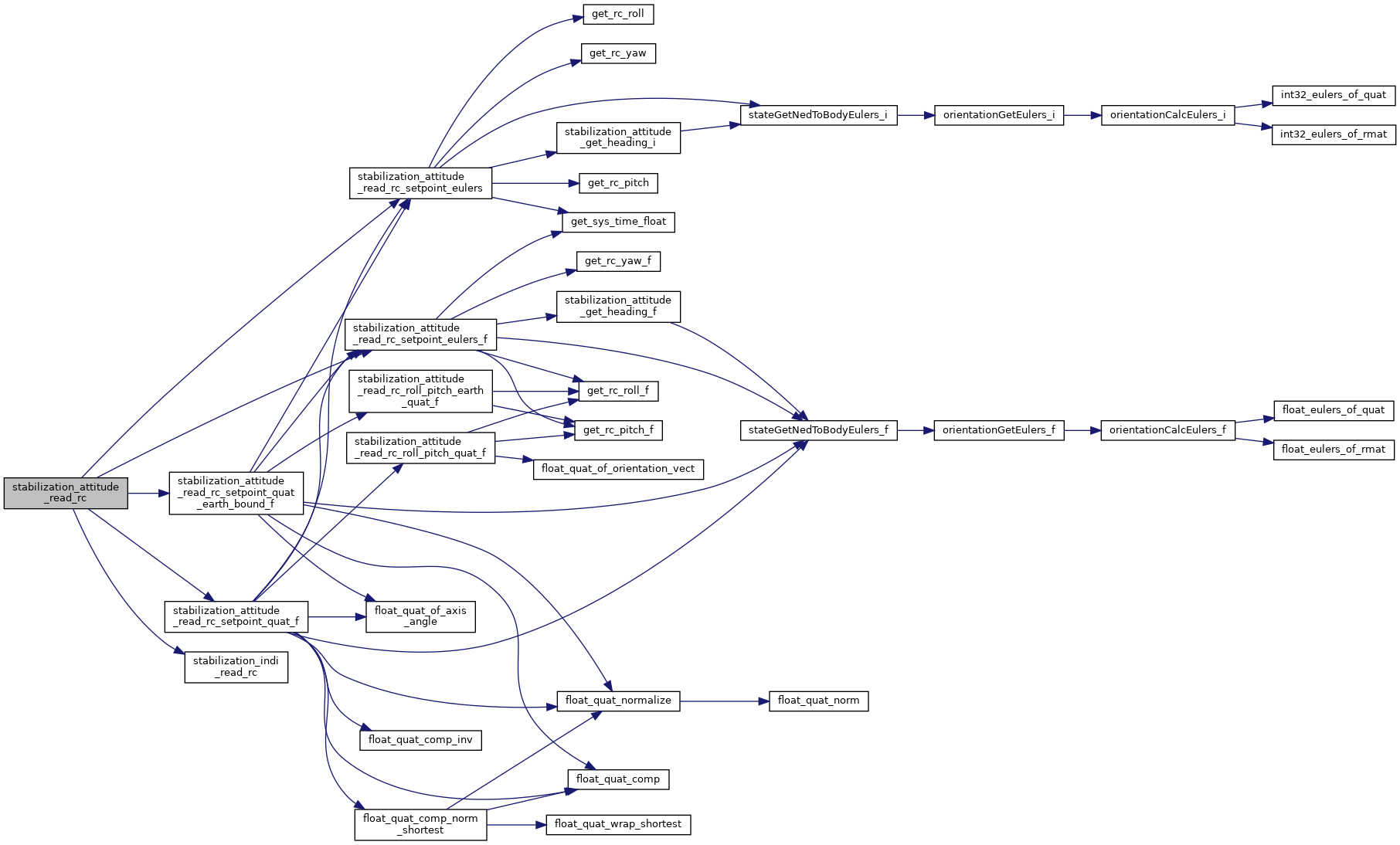
Here is the call graph for this function:| void stabilization_attitude_read_rc | ( | bool | in_flight, |
| bool | in_carefree, | ||
| bool | coordinated_turn | ||
| ) |
Definition at line 131 of file stabilization_attitude_euler_float.c.
References QUAT_BFP_OF_REAL, stab_att_sp_euler, stab_att_sp_quat, stabilization_attitude_read_rc_setpoint_eulers(), stabilization_attitude_read_rc_setpoint_eulers_f(), stabilization_attitude_read_rc_setpoint_quat_earth_bound_f(), stabilization_attitude_read_rc_setpoint_quat_f(), and stabilization_indi_read_rc().
Referenced by guidance_h_read_rc().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_run | ( | bool | in_flight | ) |
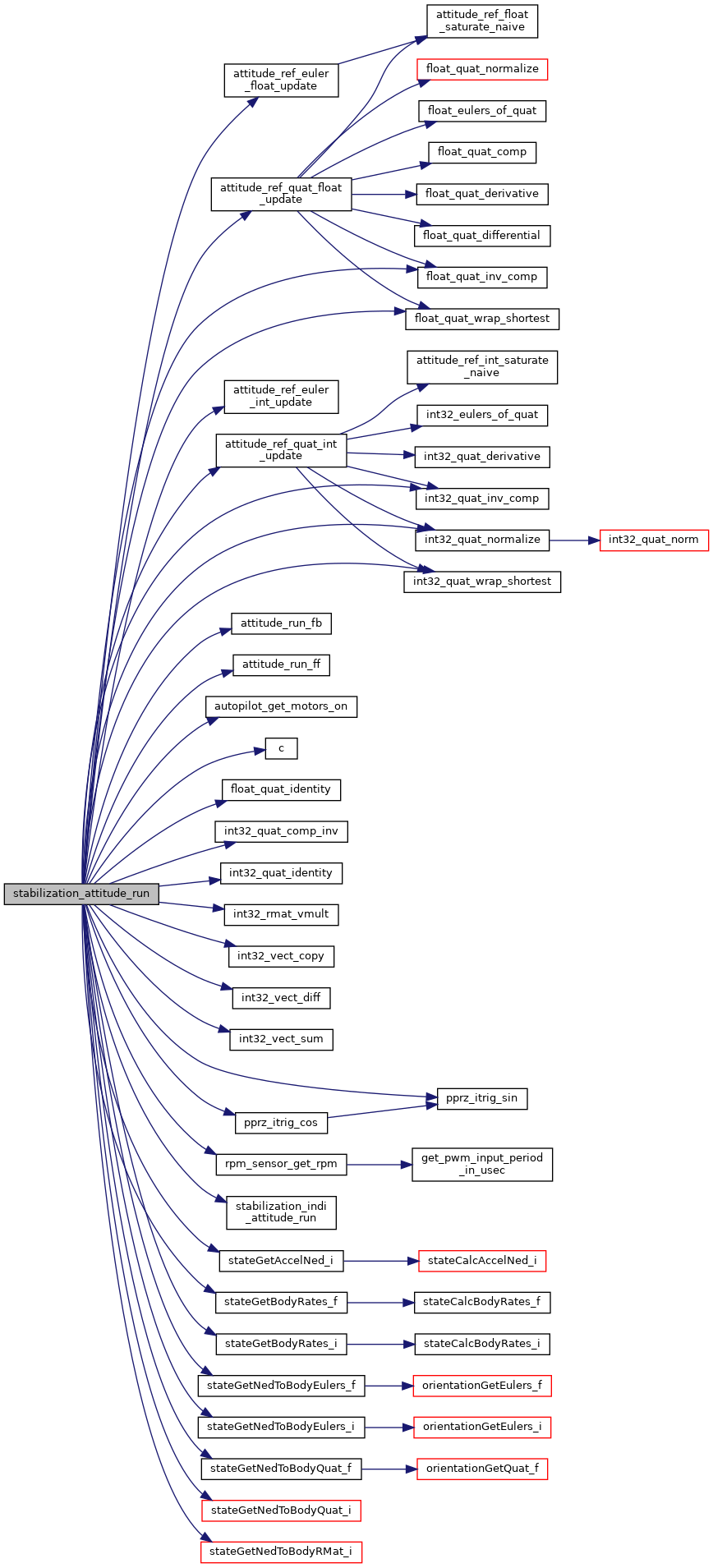
Definition at line 176 of file stabilization_attitude_euler_float.c.
References __k, AttRefEulerInt::accel, AttRefEulerFloat::accel, AttRefQuatFloat::accel, AttRefQuatInt::accel, att_ref_euler_f, att_ref_euler_i, att_ref_quat_f, att_ref_quat_i, attitude_ref_euler_float_update(), attitude_ref_euler_int_update(), attitude_ref_quat_float_update(), attitude_ref_quat_int_update(), attitude_run_fb(), attitude_run_ff(), autopilot_get_motors_on(), body_rate_d, c(), CMD_SHIFT, Int32AttitudeGains::d, FloatAttitudeGains::d, Int32AttitudeGains::dd, FloatAttitudeGains::dd, IndiController_int::enable_notch, AttRefEulerInt::euler, AttRefEulerFloat::euler, EULERS_ADD, EULERS_BOUND_CUBE, EULERS_COPY, EULERS_DIFF, Int32AttitudeGains::ffd, FLOAT_ANGLE_NORMALIZE, FLOAT_EULERS_ZERO, float_quat_identity(), float_quat_inv_comp(), float_quat_wrap_shortest(), FLOAT_RATES_ZERO, gain_idx, heli_indi_ctl, heli_indi_gains, Int32AttitudeGains::i, FloatAttitudeGains::i, IERROR_SCALE, INDI_DOF, INDI_NR_FILTERS, INDI_PITCH, INDI_ROLL, INDI_THRUST, INDI_YAW, INT32_ANGLE_FRAC, INT32_ANGLE_NORMALIZE, INT32_EULERS_LSHIFT, INT32_INVG_FRAC, int32_quat_comp_inv(), int32_quat_identity(), int32_quat_inv_comp(), int32_quat_normalize(), int32_quat_wrap_shortest(), INT32_RATE_FRAC, int32_rmat_vmult(), int32_vect_copy(), int32_vect_diff(), int32_vect_sum(), INT_EULERS_ZERO, INT_RATES_ZERO, INTEGRATOR_BOUND, last_body_rate, MAT_MUL_VECT, MAX_PPRZ, MAX_SUM_ERR, IndiController_int::motor_rpm, OFFSET_AND_ROUND, OFFSET_AND_ROUND2, Int32AttitudeGains::p, FloatAttitudeGains::p, FloatRates::p, Int32Rates::p, FloatEulers::phi, Int32Eulers::phi, HeliIndiGains::pitch_p, pprz_itrig_cos(), pprz_itrig_sin(), FloatEulers::psi, Int32Eulers::psi, FloatRates::q, Int32Rates::q, AttRefQuatFloat::quat, AttRefQuatInt::quat, FloatQuat::qx, Int32Quat::qx, FloatQuat::qy, Int32Quat::qy, FloatQuat::qz, Int32Quat::qz, FloatRates::r, Int32Rates::r, AttRefEulerInt::rate, AttRefEulerFloat::rate, AttRefQuatFloat::rate, AttRefQuatInt::rate, RATES_COPY, RATES_DIFF, REF_ANGLE_FRAC, REF_RATE_FRAC, HeliIndiGains::roll_p, rpm_sensor_get_rpm(), sp_offset, stab_att_sp_euler, stab_att_sp_quat, stabilization_att_fb_cmd, stabilization_att_ff_cmd, stabilization_att_sum_err, stabilization_att_sum_err_quat, stabilization_cmd, stabilization_gains, stabilization_indi_attitude_run(), stateGetAccelNed_i(), stateGetBodyRates_f(), stateGetBodyRates_i(), stateGetNedToBodyEulers_f(), stateGetNedToBodyEulers_i(), stateGetNedToBodyQuat_f(), stateGetNedToBodyQuat_i(), stateGetNedToBodyRMat_i(), FloatEulers::theta, Int32Eulers::theta, TRAJ_MAX_BANK, FloatVect3::x, NedCoor_i::x, Int32Vect3::x, FloatVect3::y, NedCoor_i::y, Int32Vect3::y, HeliIndiGains::yaw_d, HeliIndiGains::yaw_p, FloatVect3::z, NedCoor_i::z, and Int32Vect3::z.
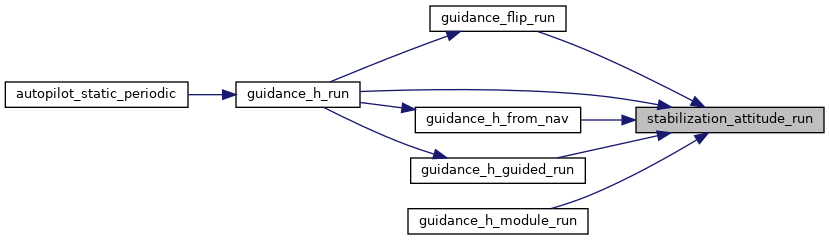
Referenced by guidance_flip_run(), guidance_h_from_nav(), guidance_h_guided_run(), guidance_h_module_run(), and guidance_h_run().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_set_earth_cmd_i | ( | struct Int32Vect2 * | cmd, |
| int32_t | heading | ||
| ) |
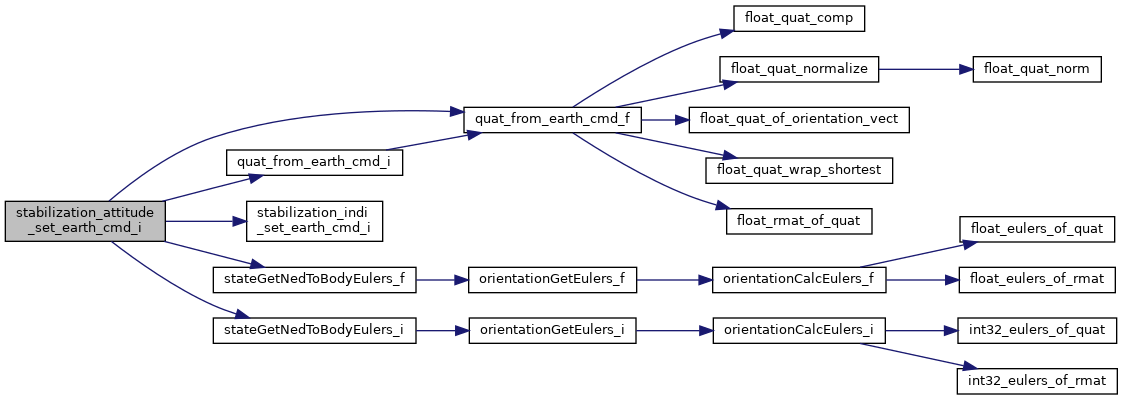
Definition at line 159 of file stabilization_attitude_euler_float.c.
References ANGLE_FLOAT_OF_BFP, heading, INT32_TRIG_FRAC, FloatEulers::phi, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, FloatEulers::psi, Int32Eulers::psi, quat_from_earth_cmd_f(), quat_from_earth_cmd_i(), stab_att_sp_euler, stab_att_sp_quat, stabilization_indi_set_earth_cmd_i(), stateGetNedToBodyEulers_f(), stateGetNedToBodyEulers_i(), FloatEulers::theta, Int32Eulers::theta, FloatVect2::x, Int32Vect2::x, FloatVect2::y, and Int32Vect2::y.
Referenced by guidance_flip_run(), guidance_h_from_nav(), and guidance_h_guided_run().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_set_failsafe_setpoint | ( | void | ) |
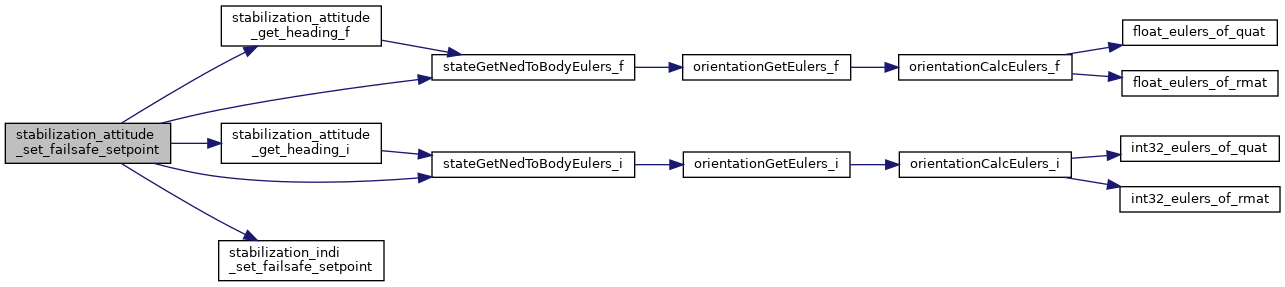
Definition at line 147 of file stabilization_attitude_euler_float.c.
References FloatEulers::phi, Int32Eulers::phi, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, FloatEulers::psi, Int32Eulers::psi, FloatQuat::qi, Int32Quat::qi, FloatQuat::qx, Int32Quat::qx, FloatQuat::qy, Int32Quat::qy, FloatQuat::qz, Int32Quat::qz, stab_att_sp_euler, stab_att_sp_quat, stabilization_attitude_get_heading_f(), stabilization_attitude_get_heading_i(), stabilization_indi_set_failsafe_setpoint(), stateGetNedToBodyEulers_f(), stateGetNedToBodyEulers_i(), FloatEulers::theta, and Int32Eulers::theta.
Referenced by autopilot_static_set_mode().
Here is the call graph for this function: Here is the caller graph for this function:| void stabilization_attitude_set_rpy_setpoint_i | ( | struct Int32Eulers * | rpy | ) |
Definition at line 154 of file stabilization_attitude_euler_float.c.
References EULERS_FLOAT_OF_BFP, float_quat_of_eulers(), int32_quat_of_eulers(), stab_att_sp_euler, stab_att_sp_quat, and stabilization_indi_set_rpy_setpoint_i().
Referenced by guidance_h_from_nav(), guidance_h_module_run(), guidance_hybrid_reset_heading(), and horizontal_ctrl_module_run().
Here is the call graph for this function: Here is the caller graph for this function: 1.8.17
1.8.17