|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
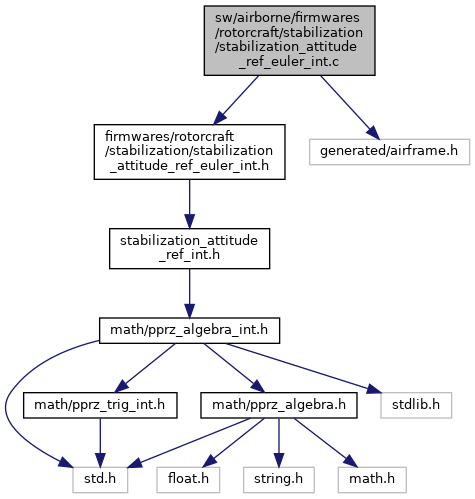
#include "firmwares/rotorcraft/stabilization/stabilization_attitude_ref_euler_int.h"#include "generated/airframe.h" Include dependency graph for stabilization_attitude_ref_euler_int.c:
Include dependency graph for stabilization_attitude_ref_euler_int.c:Go to the source code of this file.
Functions | |
| void | attitude_ref_euler_int_init (struct AttRefEulerInt *ref) |
| void | attitude_ref_euler_int_update (struct AttRefEulerInt *ref, struct Int32Eulers *sp_euler) |
| Propagate reference model. More... | |
Rotorcraft attitude reference generation (euler int version)
Definition in file stabilization_attitude_ref_euler_int.c.
| #define ANGLE_REF_NORMALIZE | ( | _a | ) |
Definition at line 66 of file stabilization_attitude_ref_euler_int.c.
| #define F_UPDATE (1<<F_UPDATE_RES) |
Definition at line 32 of file stabilization_attitude_ref_euler_int.c.
| #define F_UPDATE_RES 9 |
Definition at line 31 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_2_P BFP_OF_REAL((OMEGA_P*OMEGA_P), OMEGA_2_P_RES) |
Definition at line 47 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_2_P_RES 7 |
Definition at line 46 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_2_Q BFP_OF_REAL((OMEGA_Q*OMEGA_Q), OMEGA_2_Q_RES) |
Definition at line 54 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_2_Q_RES 7 |
Definition at line 53 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_2_R BFP_OF_REAL((OMEGA_R*OMEGA_R), OMEGA_2_R_RES) |
Definition at line 61 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_2_R_RES 7 |
Definition at line 60 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_P STABILIZATION_ATTITUDE_REF_OMEGA_P |
Definition at line 42 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_Q STABILIZATION_ATTITUDE_REF_OMEGA_Q |
Definition at line 49 of file stabilization_attitude_ref_euler_int.c.
| #define OMEGA_R STABILIZATION_ATTITUDE_REF_OMEGA_R |
Definition at line 56 of file stabilization_attitude_ref_euler_int.c.
| #define REF_ACCEL_MAX_P BFP_OF_REAL(STABILIZATION_ATTITUDE_REF_MAX_PDOT, REF_ACCEL_FRAC) |
Definition at line 34 of file stabilization_attitude_ref_euler_int.c.
| #define REF_ACCEL_MAX_Q BFP_OF_REAL(STABILIZATION_ATTITUDE_REF_MAX_QDOT, REF_ACCEL_FRAC) |
Definition at line 35 of file stabilization_attitude_ref_euler_int.c.
| #define REF_ACCEL_MAX_R BFP_OF_REAL(STABILIZATION_ATTITUDE_REF_MAX_RDOT, REF_ACCEL_FRAC) |
Definition at line 36 of file stabilization_attitude_ref_euler_int.c.
| #define REF_ANGLE_PI BFP_OF_REAL(3.1415926535897932384626433832795029, REF_ANGLE_FRAC) |
Definition at line 64 of file stabilization_attitude_ref_euler_int.c.
| #define REF_ANGLE_TWO_PI BFP_OF_REAL(2.*3.1415926535897932384626433832795029, REF_ANGLE_FRAC) |
Definition at line 65 of file stabilization_attitude_ref_euler_int.c.
| #define REF_RATE_MAX_P BFP_OF_REAL(STABILIZATION_ATTITUDE_REF_MAX_P, REF_RATE_FRAC) |
Definition at line 38 of file stabilization_attitude_ref_euler_int.c.
| #define REF_RATE_MAX_Q BFP_OF_REAL(STABILIZATION_ATTITUDE_REF_MAX_Q, REF_RATE_FRAC) |
Definition at line 39 of file stabilization_attitude_ref_euler_int.c.
| #define REF_RATE_MAX_R BFP_OF_REAL(STABILIZATION_ATTITUDE_REF_MAX_R, REF_RATE_FRAC) |
Definition at line 40 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_OMEGA_P BFP_OF_REAL((ZETA_P*OMEGA_P), ZETA_OMEGA_P_RES) |
Definition at line 45 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_OMEGA_P_RES 10 |
Definition at line 44 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_OMEGA_Q BFP_OF_REAL((ZETA_Q*OMEGA_Q), ZETA_OMEGA_Q_RES) |
Definition at line 52 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_OMEGA_Q_RES 10 |
Definition at line 51 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_OMEGA_R BFP_OF_REAL((ZETA_R*OMEGA_R), ZETA_OMEGA_R_RES) |
Definition at line 59 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_OMEGA_R_RES 10 |
Definition at line 58 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_P STABILIZATION_ATTITUDE_REF_ZETA_P |
Definition at line 43 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_Q STABILIZATION_ATTITUDE_REF_ZETA_Q |
Definition at line 50 of file stabilization_attitude_ref_euler_int.c.
| #define ZETA_R STABILIZATION_ATTITUDE_REF_ZETA_R |
Definition at line 57 of file stabilization_attitude_ref_euler_int.c.
| void attitude_ref_euler_int_init | ( | struct AttRefEulerInt * | ref | ) |
Definition at line 73 of file stabilization_attitude_ref_euler_int.c.
References INT_EULERS_ZERO, INT_RATES_ZERO, and ref.
Referenced by stabilization_attitude_init().
Here is the caller graph for this function:| void attitude_ref_euler_int_update | ( | struct AttRefEulerInt * | ref, |
| struct Int32Eulers * | sp_euler | ||
| ) |
Propagate reference model.
FIXME: has hardcoded timestep (512Hz via fixed F_UPDATE_RES)
Definition at line 84 of file stabilization_attitude_ref_euler_int.c.
References ANGLE_REF_NORMALIZE, EULERS_ADD, EULERS_DIFF, F_UPDATE_RES, INT32_ANGLE_FRAC, INT32_EULERS_LSHIFT, OMEGA_2_P, OMEGA_2_P_RES, OMEGA_2_Q, OMEGA_2_Q_RES, OMEGA_2_R, OMEGA_2_R_RES, Int32Eulers::phi, Int32Eulers::psi, RATES_ADD, RATES_BOUND_BOX, RATES_SUM, ref, REF_ACCEL_FRAC, REF_ACCEL_MAX_P, REF_ACCEL_MAX_Q, REF_ACCEL_MAX_R, REF_ANGLE_FRAC, REF_RATE_FRAC, Int32Eulers::theta, ZETA_OMEGA_P, ZETA_OMEGA_P_RES, ZETA_OMEGA_Q, ZETA_OMEGA_Q_RES, ZETA_OMEGA_R, and ZETA_OMEGA_R_RES.
Referenced by stabilization_attitude_run().
Here is the caller graph for this function: 1.8.17
1.8.17