|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

Turn around 2 points, with possible margins Can be used in mission mode. More...
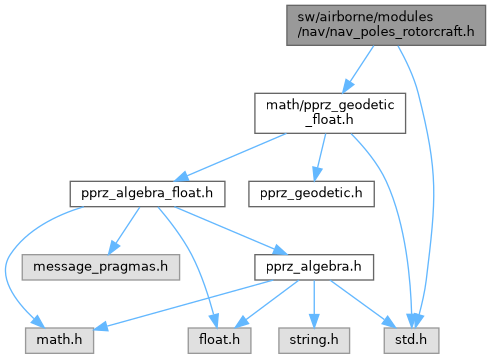
 Include dependency graph for nav_poles_rotorcraft.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_poles_rotorcraft.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| void | nav_poles_init (void) |
| Global init. | |
| bool | nav_poles_setup_wp (uint8_t wp1, uint8_t wp2, float height, float radius, float margin, int8_t nb_laps) |
| Init poles from flight plan waypoints. | |
| bool | nav_poles_setup_lla (struct LlaCoor_f *lla1, struct LlaCoor_f *lla2, float height, float radius, float margin, int8_t nb_laps) |
| Init poles from waypoints coordinates in LLA format. | |
| bool | nav_poles_run (void) |
Variables | |
| uint8_t | nav_poles_count |
Turn around 2 points, with possible margins Can be used in mission mode.
Definition in file nav_poles_rotorcraft.h.
Global init.
Definition at line 85 of file nav_poles_rotorcraft.c.
References foo, mission_register(), nav_poles_count, nav_poles_nb_laps, and oval_radius.
Here is the call graph for this function:Definition at line 146 of file nav_poles_rotorcraft.c.
References foo, nav, RotorcraftNavigation::nav_oval, nav_poles_count, nav_poles_nb_laps, NavOvalCount, oval_radius, and oval_wp2.
|
extern |
Init poles from waypoints coordinates in LLA format.
| [in] | wp1 | waypoint LLA position |
| [in] | wp2 | waypoint LLA position |
| [in] | height | flight height above ref point |
| [in] | radius | turn radius in meters, CW is >0, CCW otherwise |
| [in] | margin | margin factor: 0 -> overfly points, 1 -> turn at 'radius' distance |
| [in] | nb_laps | number of laps (<0 for no lap limit) |
Definition at line 135 of file nav_poles_rotorcraft.c.
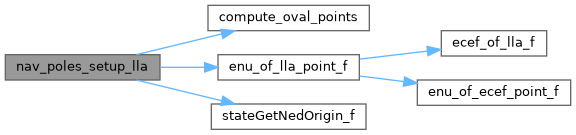
References compute_oval_points(), enu_of_lla_point_f(), foo, nav_poles_nb_laps, and stateGetNedOrigin_f().
Here is the call graph for this function:
|
extern |
Init poles from flight plan waypoints.
| [in] | wp1 | waypoint ID |
| [in] | wp2 | waypoint ID |
| [in] | height | flight height above ref point |
| [in] | radius | turn radius in meters, CW is >0, CCW otherwise |
| [in] | margin | margin factor: 0 -> overfly points, 1 -> turn at 'radius' distance |
Definition at line 123 of file nav_poles_rotorcraft.c.
References compute_oval_points(), foo, nav_poles_nb_laps, and waypoint_get_enu_f().
Here is the call graph for this function:
|
extern |
Definition at line 29 of file nav_poles.c.
Referenced by nav_poles_init(), and nav_poles_run().