|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
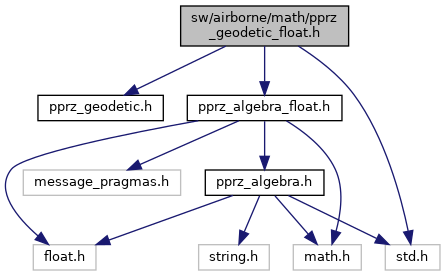
Paparazzi floating point math for geodetic calculations. More...
 Include dependency graph for pprz_geodetic_float.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for pprz_geodetic_float.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | EcefCoor_f |
| vector in EarthCenteredEarthFixed coordinates More... | |
| struct | LlaCoor_f |
| vector in Latitude, Longitude and Altitude More... | |
| struct | NedCoor_f |
| vector in North East Down coordinates Units: meters More... | |
| struct | EnuCoor_f |
| vector in East North Up coordinates Units: meters More... | |
| struct | UtmCoor_f |
| position in UTM coordinates Units: meters More... | |
| struct | LtpDef_f |
| definition of the local (flat earth) coordinate system More... | |
Paparazzi floating point math for geodetic calculations.
Definition in file pprz_geodetic_float.h.
| struct EcefCoor_f |
vector in EarthCenteredEarthFixed coordinates
Origin at center of mass of the Earth. Z-axis is pointing north, the x-axis intersects the sphere of the earth at 0° latitude (Equator) and 0° longitude (Greenwich). Y-axis completes it to right-hand system. Units: meters
Definition at line 45 of file pprz_geodetic_float.h.
| Data Fields | ||
|---|---|---|
| float | x | in meters |
| float | y | in meters |
| float | z | in meters |
| struct LlaCoor_f |
vector in Latitude, Longitude and Altitude
Definition at line 54 of file pprz_geodetic_float.h.
| Data Fields | ||
|---|---|---|
| float | alt | in meters (normally above WGS84 reference ellipsoid) |
| float | lat | in radians |
| float | lon | in radians |
| struct NedCoor_f |
vector in North East Down coordinates Units: meters
Definition at line 63 of file pprz_geodetic_float.h.
| Data Fields | ||
|---|---|---|
| float | x | in meters |
| float | y | in meters |
| float | z | in meters |
| struct EnuCoor_f |
vector in East North Up coordinates Units: meters
Definition at line 72 of file pprz_geodetic_float.h.
| Data Fields | ||
|---|---|---|
| float | x | in meters |
| float | y | in meters |
| float | z | in meters |
| struct UtmCoor_f |
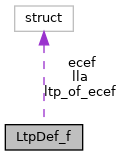
| struct LtpDef_f |
definition of the local (flat earth) coordinate system
Defines the origin of the local coordinate system in ECEF and LLA coordinates and the roation matrix from ECEF to local frame
Definition at line 93 of file pprz_geodetic_float.h.
Collaboration diagram for LtpDef_f:| Data Fields | ||
|---|---|---|
| struct EcefCoor_f | ecef | origin of local frame in ECEF |
| float | hmsl | Height above mean sea level in meters. |
| struct LlaCoor_f | lla | origin of local frame in LLA |
| struct FloatRMat | ltp_of_ecef | rotation from ECEF to local frame |
|
extern |
Definition at line 129 of file pprz_geodetic_float.c.
References foo, DoubleRMat::m, MAT33_VECT3_TRANSP_MUL, EcefCoor_f::x, EnuCoor_f::x, EcefCoor_f::y, and EcefCoor_f::z.
Referenced by ecef_of_ned_point_f(), and stateCalcPositionLla_f().
Here is the caller graph for this function:
|
extern |
Definition at line 164 of file pprz_geodetic_float.c.
References foo, DoubleRMat::m, MAT33_VECT3_TRANSP_MUL, EcefCoor_f::x, EnuCoor_f::x, EcefCoor_f::y, and EcefCoor_f::z.
Referenced by ecef_of_ned_vect_f().
Here is the caller graph for this function:
|
extern |
Definition at line 241 of file pprz_geodetic_float.c.
References f, foo, EcefCoor_f::x, EcefCoor_f::y, and EcefCoor_f::z.
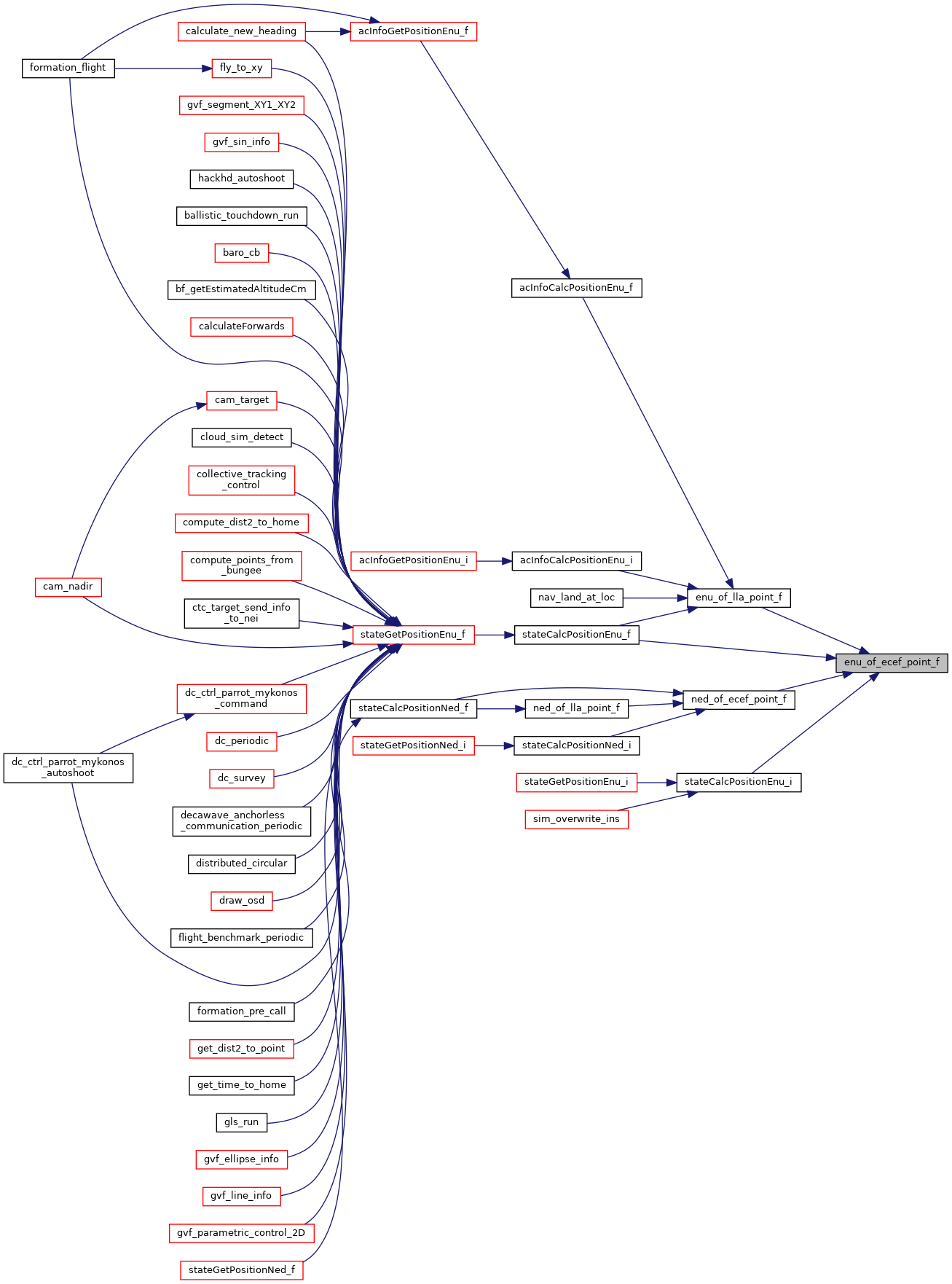
Referenced by ecef_of_lla_i(), enu_of_lla_point_f(), ltp_def_from_lla_f(), ned_of_lla_point_f(), nmea_parse_GGA(), stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_i(), and stateCalcPositionNed_i().
Here is the caller graph for this function:
|
extern |
Definition at line 157 of file pprz_geodetic_float.c.
References ecef_of_enu_point_f(), ENU_OF_TO_NED, and foo.
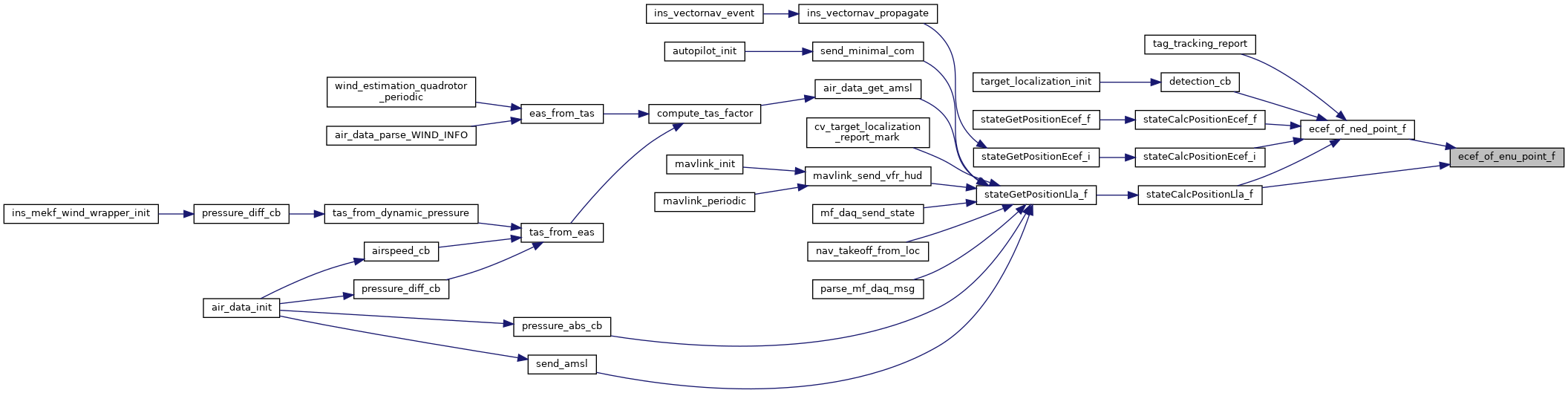
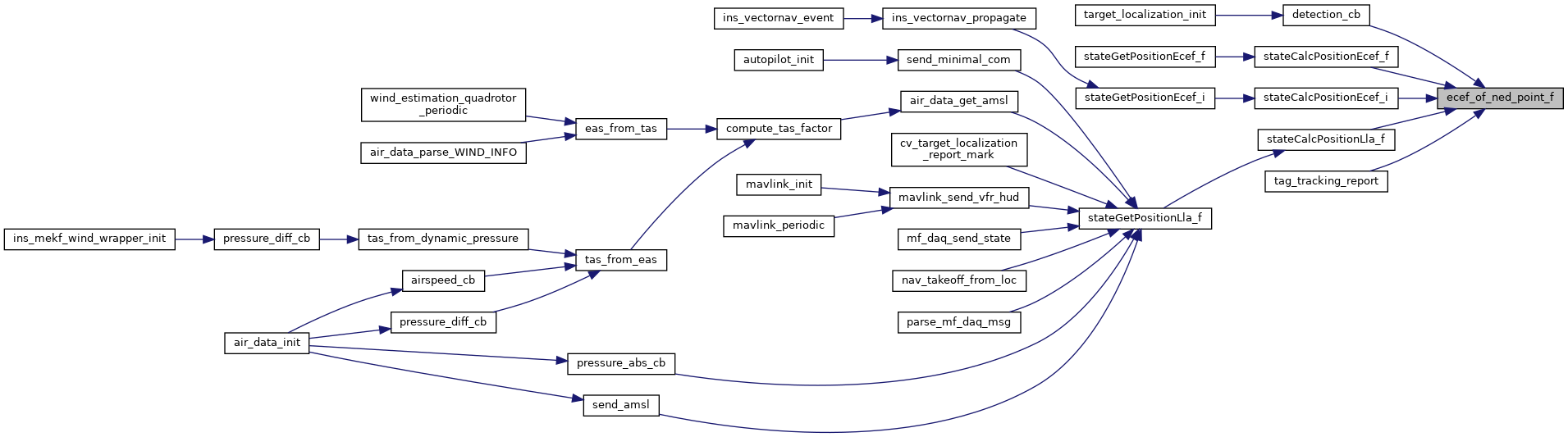
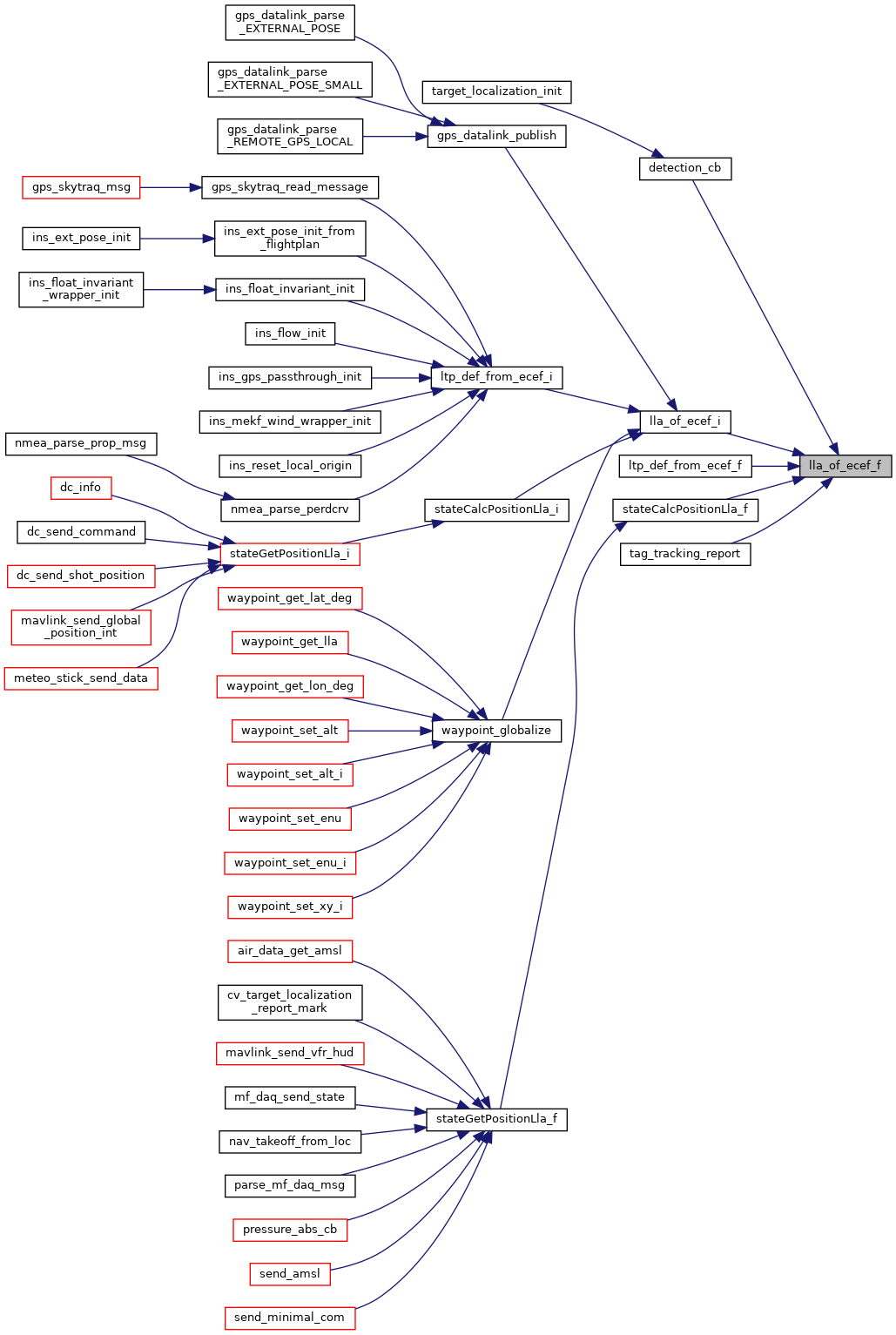
Referenced by detection_cb(), stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionLla_f(), and tag_tracking_report().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 192 of file pprz_geodetic_float.c.
References ecef_of_enu_vect_f(), ENU_OF_TO_NED, and foo.
Referenced by stateCalcAccelEcef_f(), and stateCalcSpeedEcef_f().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 85 of file pprz_geodetic_float.c.
References foo, MAT33_VECT3_MUL, and VECT3_DIFF.
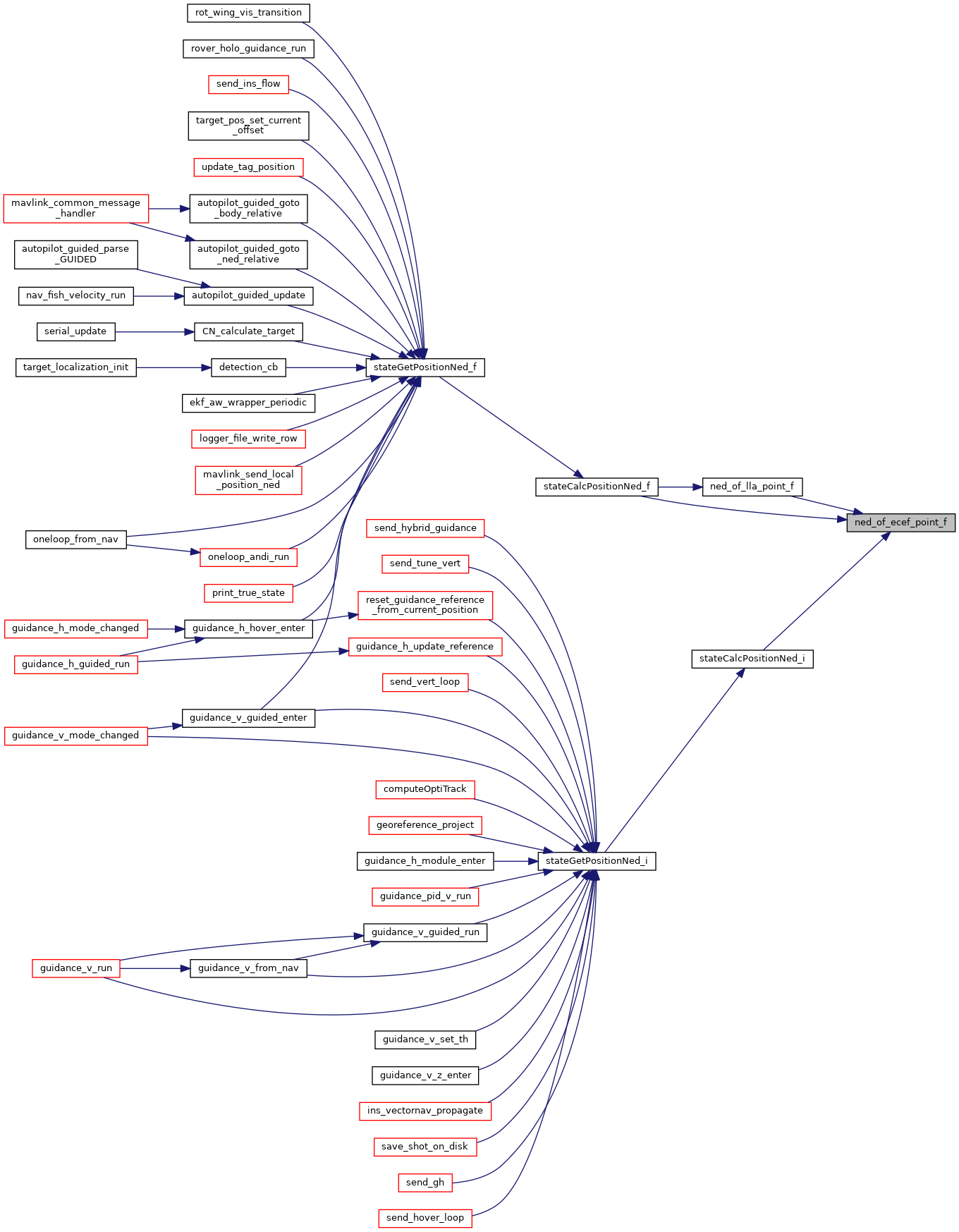
Referenced by enu_of_lla_point_f(), ned_of_ecef_point_f(), stateCalcPositionEnu_f(), and stateCalcPositionEnu_i().
Here is the caller graph for this function:
|
extern |
Definition at line 100 of file pprz_geodetic_float.c.
References foo, and MAT33_VECT3_MUL.
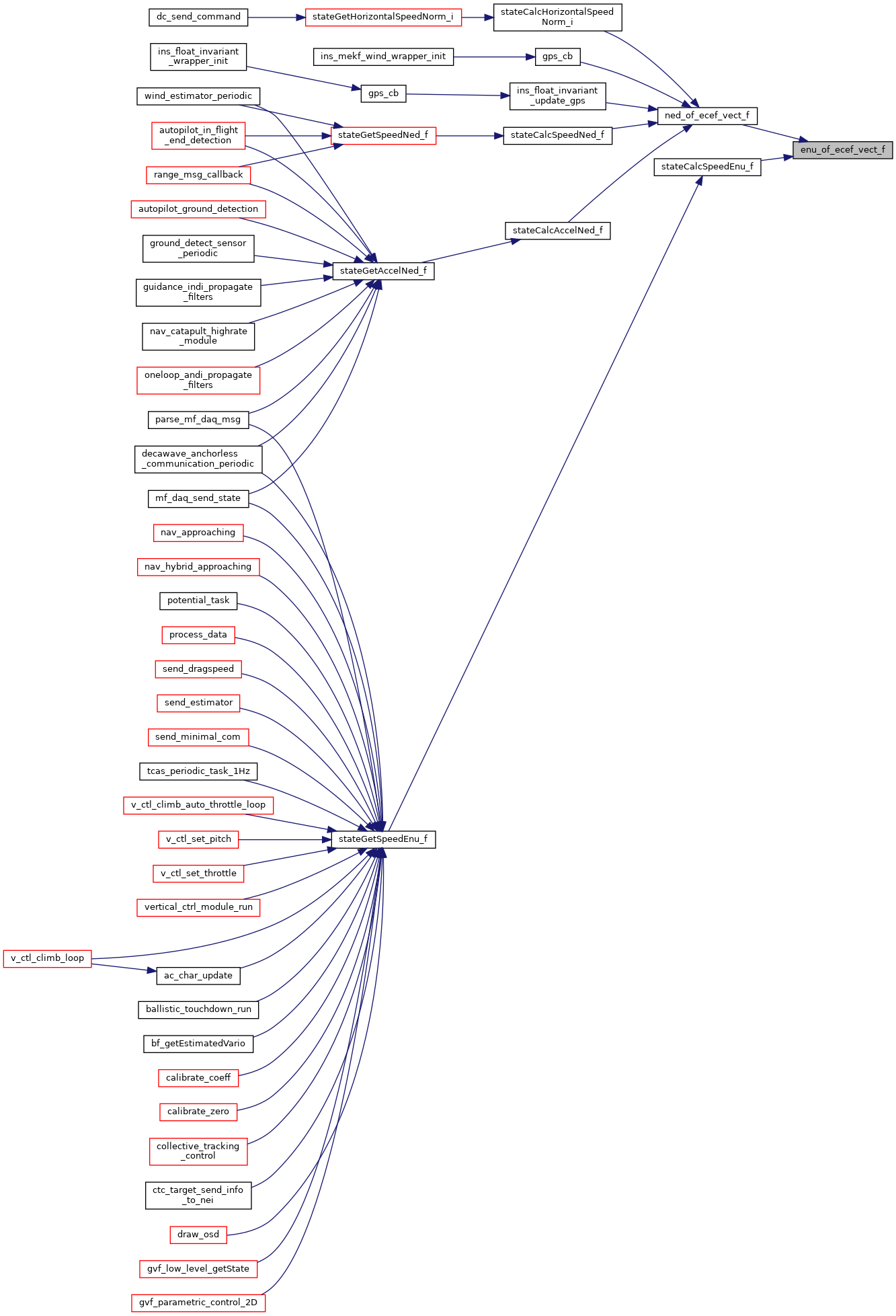
Referenced by ned_of_ecef_vect_f(), and stateCalcSpeedEnu_f().
Here is the caller graph for this function:
|
extern |
Definition at line 112 of file pprz_geodetic_float.c.
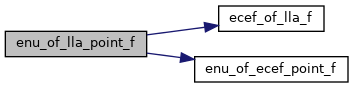
References ecef_of_lla_f(), enu_of_ecef_point_f(), and foo.
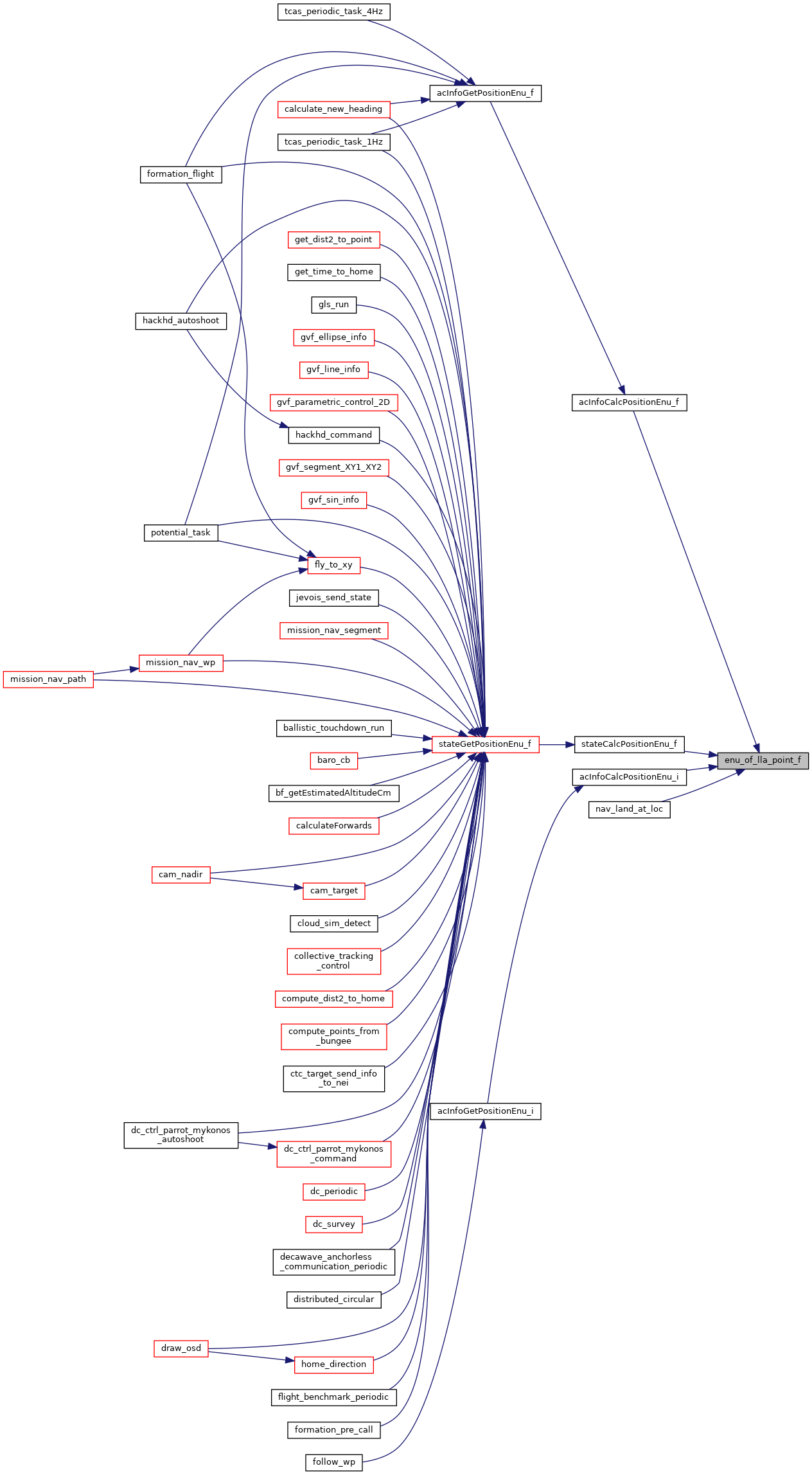
Referenced by acInfoCalcPositionEnu_f(), acInfoCalcPositionEnu_i(), nav_land_at_loc(), nav_poles_setup_lla(), and stateCalcPositionEnu_f().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 204 of file pprz_geodetic_float.c.
References LlaCoor_f::alt, b, f, foo, LlaCoor_f::lat, LlaCoor_f::lon, P, s, and z2.
Referenced by detection_cb(), lla_of_ecef_i(), ltp_def_from_ecef_f(), stateCalcPositionLla_f(), and tag_tracking_report().
Here is the caller graph for this function:Definition at line 344 of file pprz_geodetic_float.c.
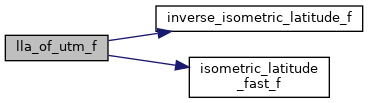
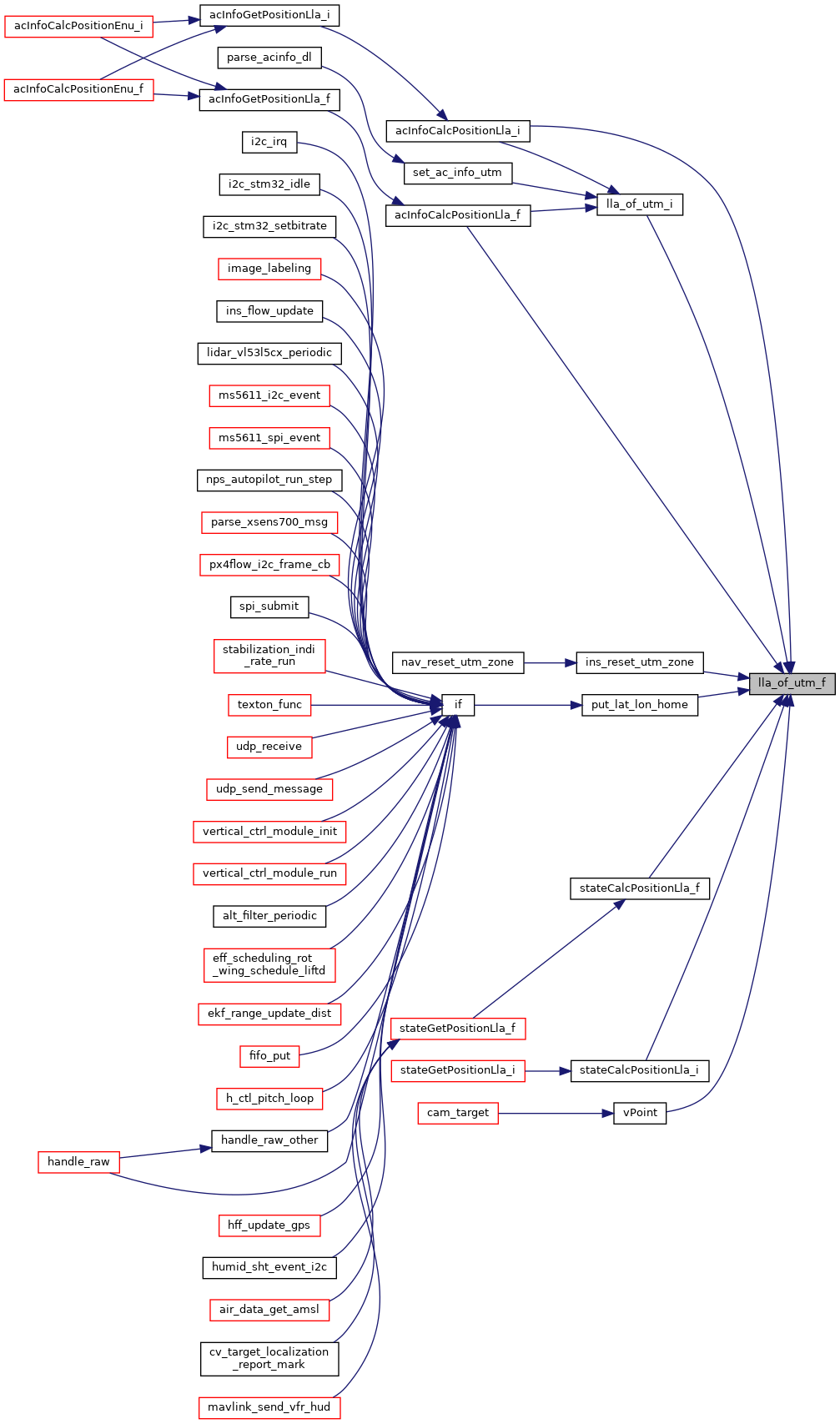
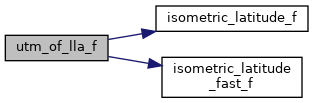
References LlaCoor_f::alt, CScal, CSin, CSub, DELTA_EAST, DELTA_NORTH, E, foo, complex::im, inverse_isometric_latitude_f(), isometric_latitude_fast_f(), LambdaOfUtmZone, LlaCoor_f::lat, LlaCoor_f::lon, N, complex::re, scale, serie_coeff_proj_mercator, and serie_coeff_proj_mercator_inverse.
Referenced by acInfoCalcPositionLla_f(), acInfoCalcPositionLla_i(), lla_of_utm_i(), nav_reset_utm_zone(), put_lat_lon_home(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateGetLlaOrigin_f(), stateGetLlaOrigin_i(), and vPoint().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 36 of file pprz_geodetic_float.c.
References foo, lla_of_ecef_f(), and VECT3_COPY.
Here is the call graph for this function:Definition at line 60 of file pprz_geodetic_float.c.
References ecef_of_lla_f(), foo, and LLA_COPY.
Here is the call graph for this function:
|
extern |
Definition at line 92 of file pprz_geodetic_float.c.
References enu_of_ecef_point_f(), ENU_OF_TO_NED, and foo.
Referenced by ned_of_lla_point_f(), stateCalcPositionNed_f(), and stateCalcPositionNed_i().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 105 of file pprz_geodetic_float.c.
References enu_of_ecef_vect_f(), ENU_OF_TO_NED, and foo.
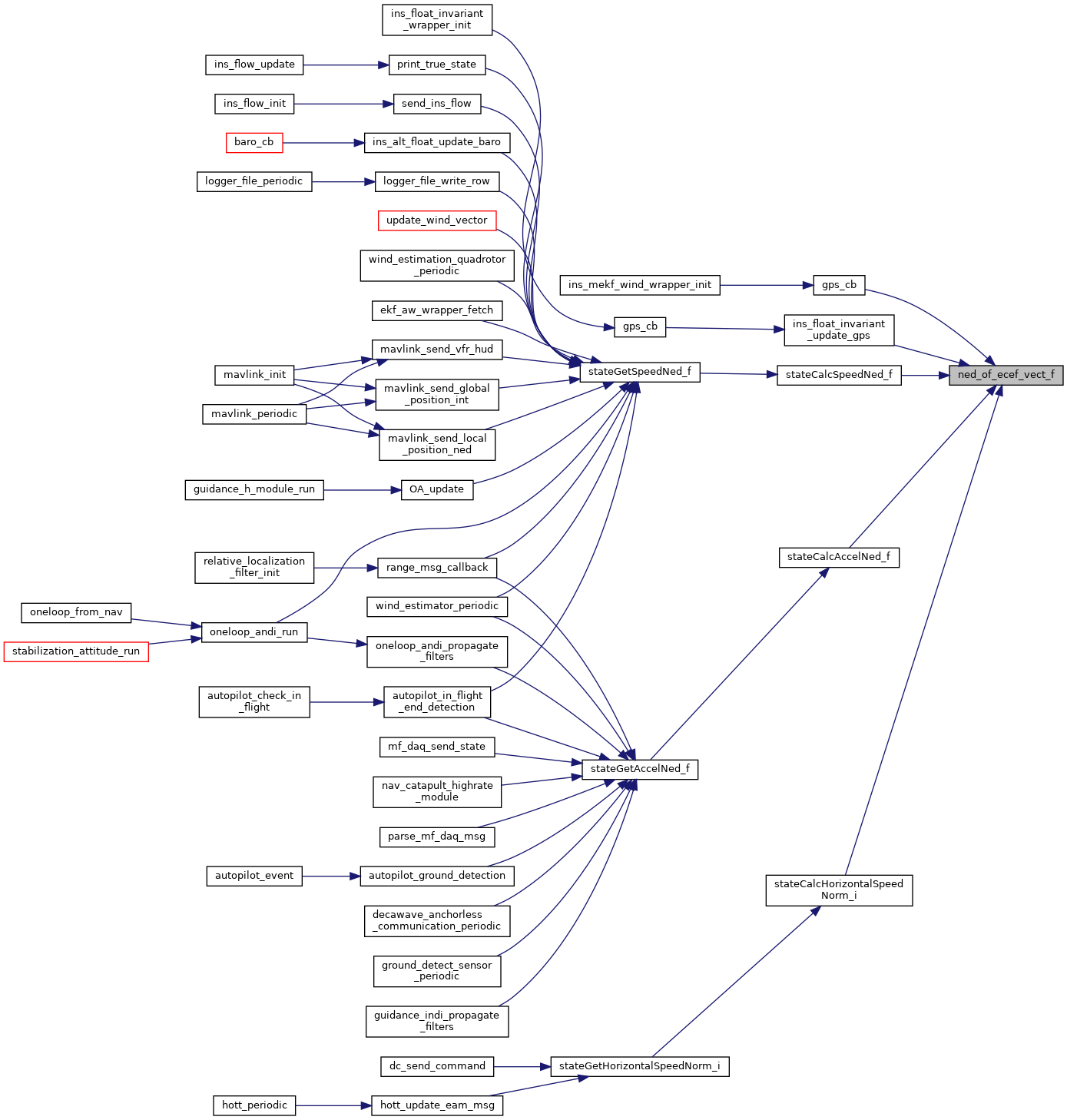
Referenced by gps_cb(), ins_float_invariant_update_gps(), stateCalcAccelNed_f(), stateCalcHorizontalSpeedNorm_i(), and stateCalcSpeedNed_f().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 119 of file pprz_geodetic_float.c.
References ecef_of_lla_f(), foo, and ned_of_ecef_point_f().
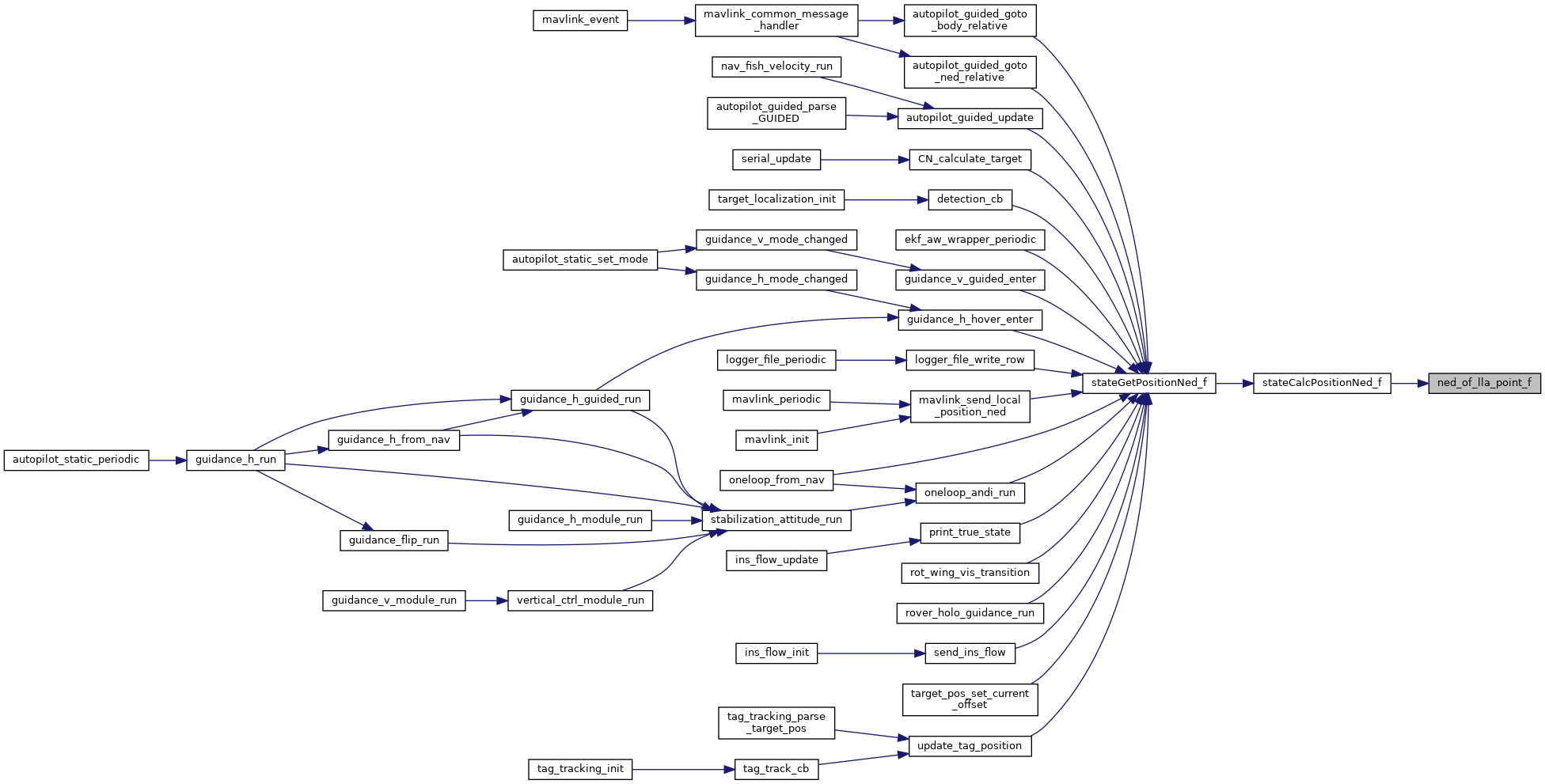
Referenced by convert_walls_to_ltp(), and stateCalcPositionNed_f().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 308 of file pprz_geodetic_float.c.
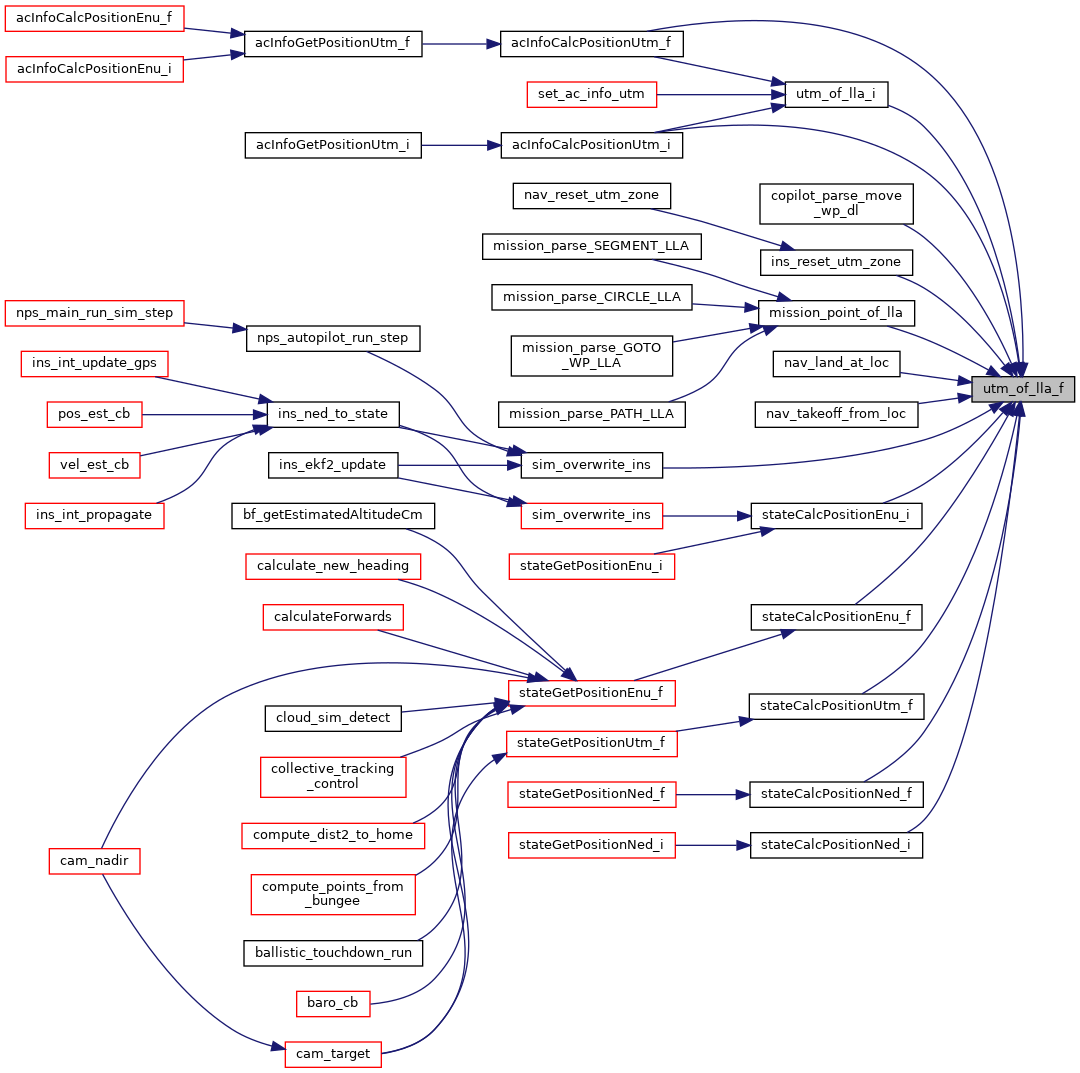
References LlaCoor_f::alt, CAdd, CScal, CSin, DELTA_EAST, DELTA_NORTH, E, foo, isometric_latitude_f(), isometric_latitude_fast_f(), LambdaOfUtmZone, LlaCoor_f::lat, LlaCoor_f::lon, N, serie_coeff_proj_mercator, and UtmZoneOfLlaLonRad.
Referenced by acInfoCalcPositionUtm_f(), acInfoCalcPositionUtm_i(), copilot_parse_move_wp_dl(), mission_point_of_lla(), nav_land_at_loc(), nav_parse_MOVE_WP(), nav_reset_utm_zone(), nav_takeoff_from_loc(), sim_overwrite_ins(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), and utm_of_lla_i().
Here is the call graph for this function: Here is the caller graph for this function: