|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

Simply passes GPS UTM position and velocity through to the state interface. More...
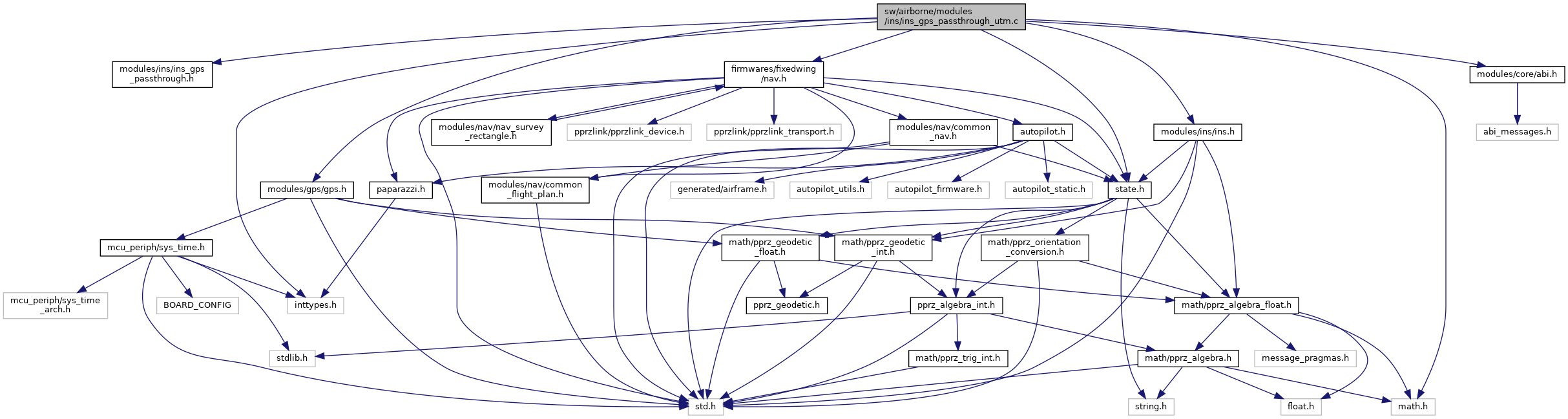
#include "modules/ins/ins_gps_passthrough.h"#include "modules/ins/ins.h"#include <inttypes.h>#include <math.h>#include "state.h"#include "modules/gps/gps.h"#include "firmwares/fixedwing/nav.h"#include "modules/core/abi.h" Include dependency graph for ins_gps_passthrough_utm.c:
Include dependency graph for ins_gps_passthrough_utm.c:Go to the source code of this file.
Macros | |
| #define | INS_PT_GPS_ID GPS_MULTI_ID |
| ABI binding for gps data. | |
Functions | |
| static void | gps_cb (uint8_t sender_id, uint32_t stamp, struct GpsState *gps_s) |
| static void | reset_cb (uint8_t sender_id, uint8_t flag) |
| void | ins_gps_passthrough_init (void) |
| static void | reset_ref (void) |
| static void | reset_vertical_ref (void) |
Variables | |
| static abi_event | gps_ev |
| static abi_event | reset_ev |
Simply passes GPS UTM position and velocity through to the state interface.
For fixedwing firmware since it sets UTM pos only.
Definition in file ins_gps_passthrough_utm.c.
| #define INS_PT_GPS_ID GPS_MULTI_ID |
ABI binding for gps data.
Used for GPS ABI messages.
Definition at line 45 of file ins_gps_passthrough_utm.c.
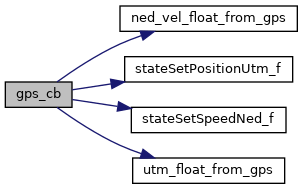
Definition at line 50 of file ins_gps_passthrough_utm.c.
References foo, nav_utm_zone0, ned_vel_float_from_gps(), stateSetPositionUtm_f(), stateSetSpeedNed_f(), and utm_float_from_gps().
Referenced by ins_gps_passthrough_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 68 of file ins_gps_passthrough_utm.c.
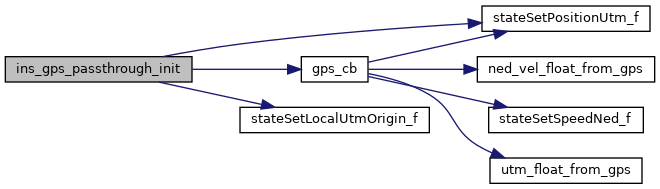
References ABI_BROADCAST, foo, gps_cb(), gps_ev, INS_PT_GPS_ID, nav_utm_east0, nav_utm_north0, nav_utm_zone0, reset_cb(), reset_ev, stateSetLocalUtmOrigin_f(), and stateSetPositionUtm_f().
Here is the call graph for this function:Definition at line 92 of file ins_gps_passthrough_utm.c.
References foo, INS_RESET_REF, INS_RESET_VERTICAL_REF, reset_ref(), and reset_vertical_ref().
Referenced by ins_gps_passthrough_init().
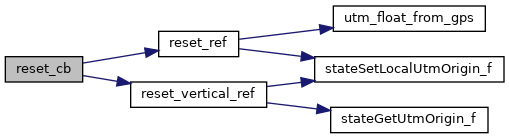
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 78 of file ins_gps_passthrough_utm.c.
References foo, gps, stateSetLocalUtmOrigin_f(), and utm_float_from_gps().
Referenced by reset_cb().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 85 of file ins_gps_passthrough_utm.c.
References foo, gps, GpsState::hmsl, stateGetUtmOrigin_f(), and stateSetLocalUtmOrigin_f().
Referenced by reset_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 48 of file ins_gps_passthrough_utm.c.
Referenced by ins_gps_passthrough_init().
|
static |
Definition at line 64 of file ins_gps_passthrough_utm.c.
Referenced by ins_gps_passthrough_init().