|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "std.h" Include dependency graph for gvf_common.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for gvf_common.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | gvf_common_state |
| struct | gvf_common_ctrl |
| struct | gvf_common_info |
| struct | gvf_common_params |
Macros | |
| #define | GVF_GRAVITY 9.806 |
Functions | |
| void | gvf_low_level_getState (void) |
| void | gvf_low_level_control_2D (float omega) |
| void | gvf_low_level_control_3D (float heading_rate, float climbing_rate) |
| bool | gvf_nav_approaching (float wp_x, float wp_y, float from_x, float from_y, float t) |
Variables | |
| gvf_common_state | gvf_c_state |
| gvf_common_ctrl | gvf_c_ctrl |
| gvf_common_info | gvf_c_info |
| gvf_common_params | gvf_c_params |
| struct gvf_common_state |
| struct gvf_common_ctrl |
Definition at line 73 of file gvf_common.h.
| Data Fields | ||
|---|---|---|
| float | omega | |
| struct gvf_common_info |
Definition at line 82 of file gvf_common.h.
| Data Fields | ||
|---|---|---|
| float | kappa | |
| float | ori_err | |
| struct gvf_common_params |
Definition at line 92 of file gvf_common.h.
| Data Fields | ||
|---|---|---|
| float | k_climb | |
| float | k_roll | |
| #define GVF_GRAVITY 9.806 |
Definition at line 54 of file gvf_common.h.
Definition at line 58 of file gvf_common.c.
References AP_MODE_AUTO2, autopilot_get_mode(), foo, ground_speed, gvf_c_ctrl, gvf_c_params, GVF_GRAVITY, h_ctl_roll_max_setpoint, h_ctl_roll_setpoint, gvf_common_params::k_roll, lateral_mode, LATERAL_MODE_ROLL, gvf_common_ctrl::omega, stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyEulers_f(), and FloatEulers::theta.
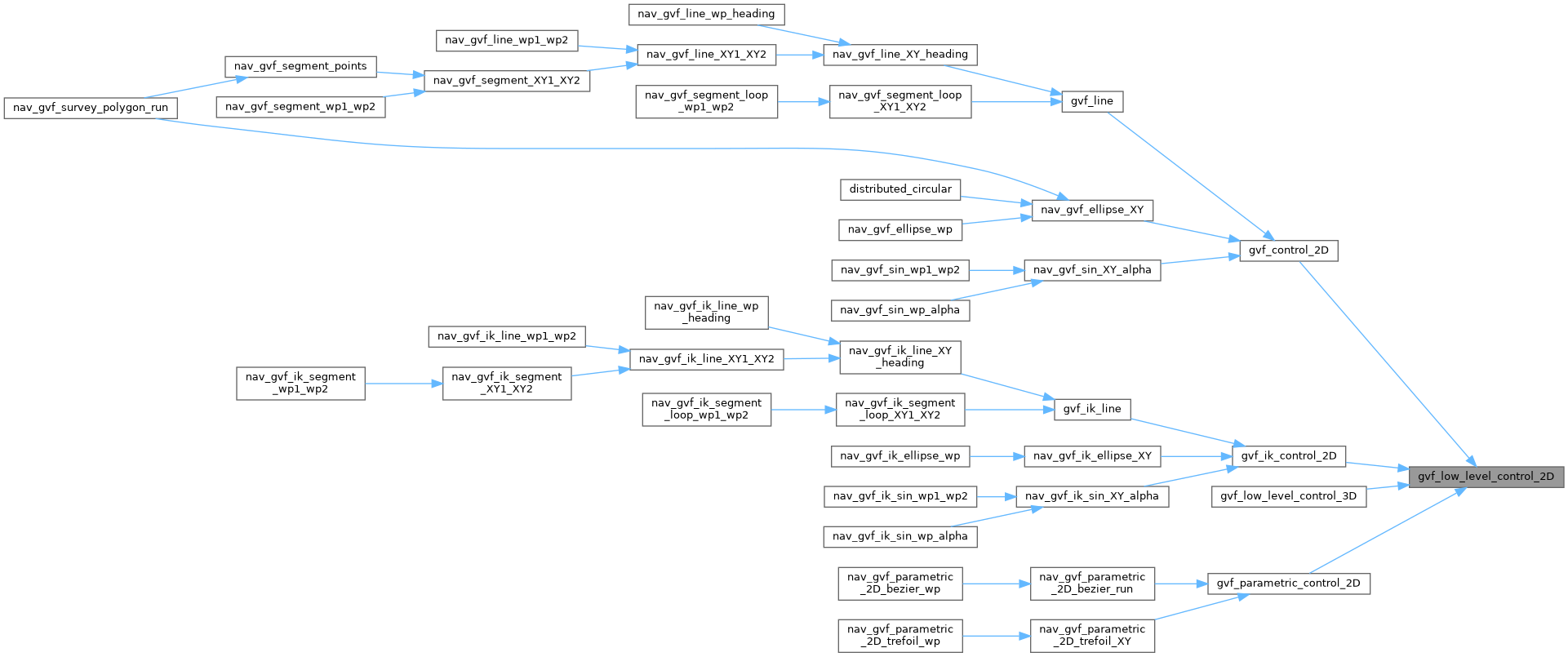
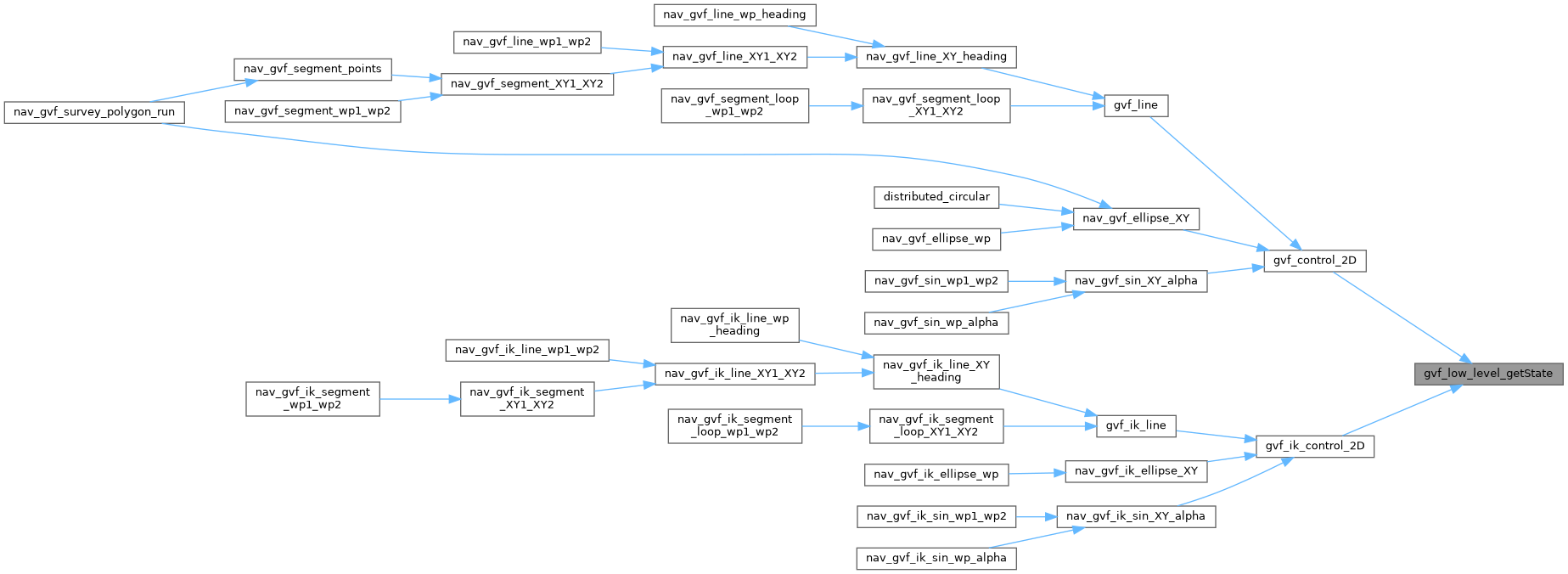
Referenced by gvf_control_2D(), gvf_ik_control_2D(), gvf_low_level_control_3D(), and gvf_parametric_control_2D().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 79 of file gvf_common.c.
References AP_MODE_AUTO2, autopilot_get_mode(), foo, ground_speed, gvf_c_params, GVF_GRAVITY, gvf_low_level_control_2D(), h_ctl_roll_max_setpoint, h_ctl_roll_setpoint, gvf_common_params::k_climb, gvf_common_params::k_roll, lateral_mode, LATERAL_MODE_ROLL, stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyEulers_f(), FloatEulers::theta, v_ctl_climb_setpoint, v_ctl_mode, V_CTL_MODE_AUTO_CLIMB, v_ctl_speed_mode, and V_CTL_SPEED_THROTTLE.
Here is the call graph for this function:Definition at line 37 of file gvf_common.c.
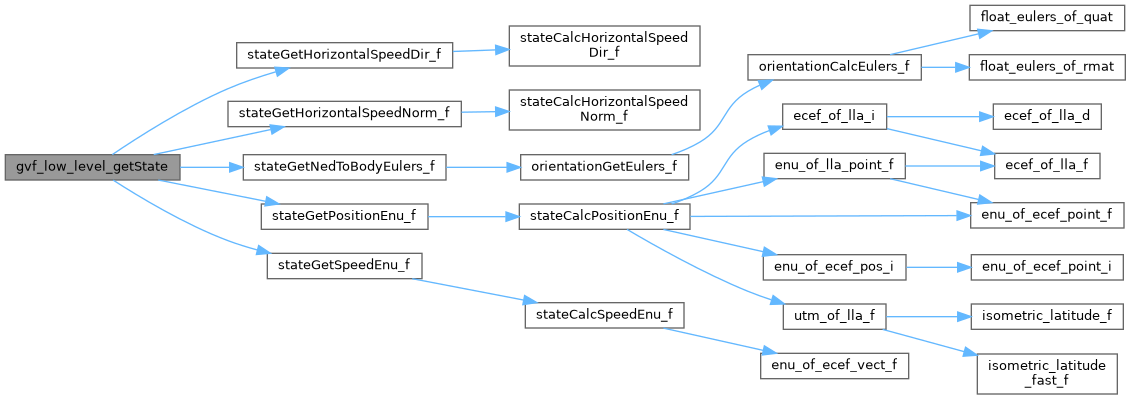
References gvf_common_state::course, foo, ground_speed, gvf_c_state, FloatEulers::psi, gvf_common_state::px, gvf_common_state::px_dot, gvf_common_state::py, gvf_common_state::py_dot, stateGetHorizontalSpeedDir_f(), stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), stateGetSpeedEnu_f(), EnuCoor_f::x, and EnuCoor_f::y.
Referenced by gvf_control_2D(), and gvf_ik_control_2D().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 106 of file gvf_common.c.
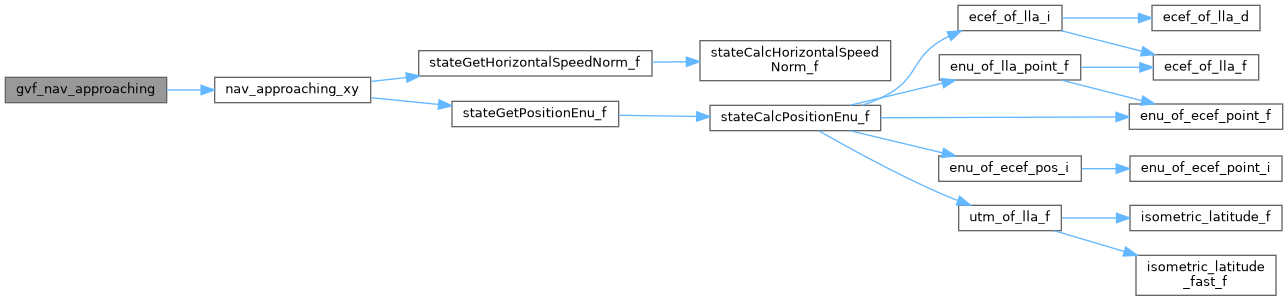
References foo, nav, RotorcraftNavigation::nav_approaching, nav_approaching_xy(), EnuCoor_f::x, and EnuCoor_f::y.
Here is the call graph for this function:
|
extern |
Definition at line 28 of file gvf_common.c.
Referenced by gvf_low_level_control_2D(), and gvf_parametric_control_2D().
|
extern |
Definition at line 29 of file gvf_common.c.
Referenced by gvf_control_2D(), gvf_ik_control_2D(), and gvf_parametric_control_2D().
|
extern |
Definition at line 30 of file gvf_common.c.
Referenced by gvf_low_level_control_2D(), gvf_low_level_control_3D(), and gvf_parametric_init().
|
extern |
Definition at line 33 of file gvf_common.c.
Referenced by gvf_control_2D(), gvf_ik_control_2D(), and gvf_low_level_getState().