|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
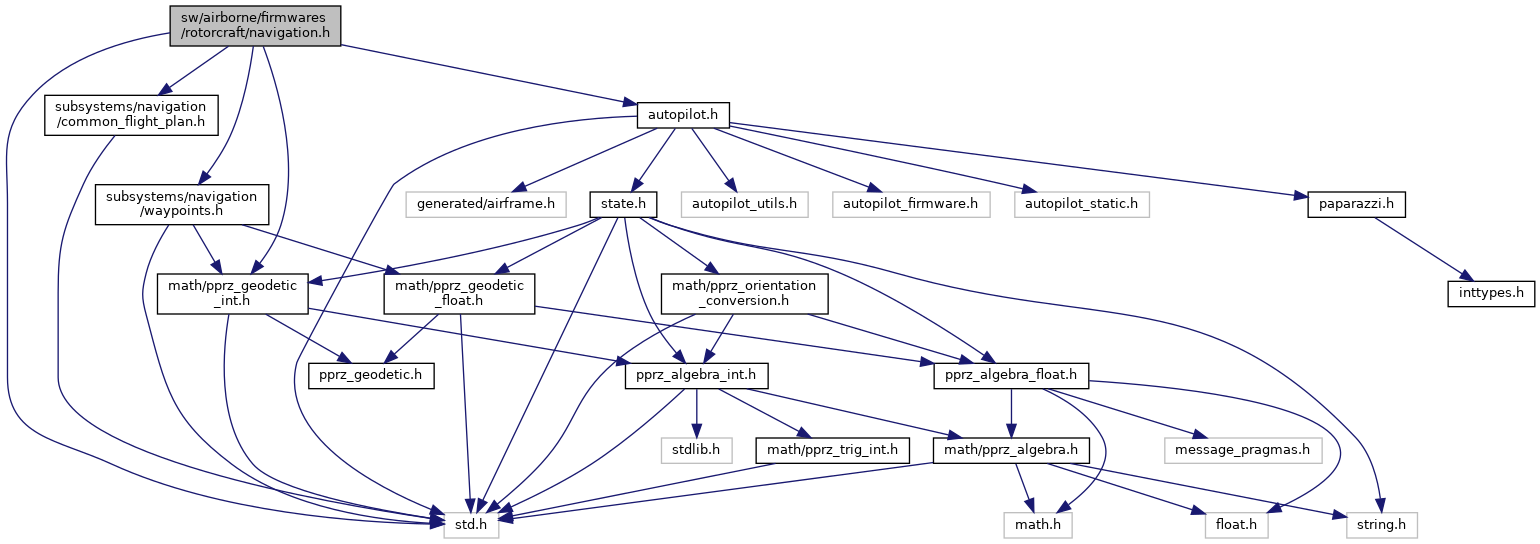
#include "std.h"#include "math/pprz_geodetic_int.h"#include "subsystems/navigation/waypoints.h"#include "subsystems/navigation/common_flight_plan.h"#include "autopilot.h" Include dependency graph for navigation.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for navigation.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | CARROT 0 |
| default approaching_time for a wp More... | |
| #define | NAV_FREQ 16 |
| #define | HORIZONTAL_MODE_WAYPOINT 0 |
| #define | HORIZONTAL_MODE_ROUTE 1 |
| #define | HORIZONTAL_MODE_CIRCLE 2 |
| #define | HORIZONTAL_MODE_ATTITUDE 3 |
| #define | HORIZONTAL_MODE_MANUAL 4 |
| #define | VERTICAL_MODE_MANUAL 0 |
| #define | VERTICAL_MODE_CLIMB 1 |
| #define | VERTICAL_MODE_ALT 2 |
| #define | GetPosX() (stateGetPositionEnu_f()->x) |
| Get current x (east) position in local coordinates. More... | |
| #define | GetPosY() (stateGetPositionEnu_f()->y) |
| Get current y (north) position in local coordinates. More... | |
| #define | GetPosAlt() (stateGetPositionEnu_f()->z+state.ned_origin_f.hmsl) |
| Get current altitude above MSL. More... | |
| #define | GetAltRef() (state.ned_origin_f.hmsl) |
| Get current altitude reference for local coordinates. More... | |
| #define | NormCourse(x) |
| Normalize a degree angle between 0 and 359. More... | |
| #define | NavStartDetectGround() ({ autopilot.detect_ground_once = true; false; }) |
| #define | NavDetectGround() nav_detect_ground() |
| #define | NavSetManual nav_set_manual |
| #define | NavSetFailsafe nav_set_failsafe |
| #define | NavSetGroundReferenceHere nav_reset_reference |
| #define | NavSetAltitudeReferenceHere nav_reset_alt |
| #define | NavSetWaypointHere waypoint_set_here_2d |
| #define | NavCopyWaypoint waypoint_copy |
| #define | NavCopyWaypointPositionOnly waypoint_position_copy |
| #define | NavApproaching(wp, time) nav_approaching_from(&waypoints[wp].enu_i, NULL, time) |
| #define | NavApproachingFrom(wp, from, time) nav_approaching_from(&waypoints[wp].enu_i, &waypoints[from].enu_i, time) |
| #define | NavCheckWaypointTime(wp, time) nav_check_wp_time(&waypoints[wp].enu_i, time) |
| #define | NavVerticalAutoThrottleMode(_pitch) |
| Set the climb control to auto-throttle with the specified pitch pre-command. More... | |
| #define | NavVerticalAutoPitchMode(_throttle) {} |
| Set the climb control to auto-pitch with the specified throttle pre-command. More... | |
| #define | NavVerticalAltitudeMode(_alt, _pre_climb) |
| Set the vertical mode to altitude control with the specified altitude setpoint and climb pre-command. More... | |
| #define | NavVerticalClimbMode(_climb) |
| Set the vertical mode to climb control with the specified climb setpoint. More... | |
| #define | NavVerticalThrottleMode(_throttle) |
| Set the vertical mode to fixed throttle with the specified setpoint. More... | |
| #define | NavHeading nav_set_heading_rad |
| Set the heading of the rotorcraft, nothing else. More... | |
| #define | NavAttitude(_roll) |
| #define | NavCircleCount() ((float)abs(nav_circle_radians) / INT32_ANGLE_2_PI) |
| #define | NavCircleQdr() ({ int32_t qdr = INT32_DEG_OF_RAD(INT32_ANGLE_PI_2 - nav_circle_qdr) >> INT32_ANGLE_FRAC; NormCourse(qdr); qdr; }) |
| #define | CloseDegAngles(_c1, _c2) ({ int32_t _diff = _c1 - _c2; NormCourse(_diff); 350 < _diff || _diff < 10; }) |
| #define | CloseRadAngles(_c1, _c2) ({ float _diff = _c1 - _c2; NormRadAngle(_diff); fabsf(_diff) < 0.0177; }) |
| #define | NavQdrCloseTo(x) CloseDegAngles(((x) >> INT32_ANGLE_FRAC), NavCircleQdr()) |
| True if x (in degrees) is close to the current QDR (less than 10 degrees) More... | |
| #define | NavCourseCloseTo(x) {} |
| #define | Oval(a, b, c) nav_oval((b), (a), (c)) |
| #define | NavFollow nav_follow |
| #define | nav_IncreaseShift(x) {} |
| #define | nav_SetNavRadius(x) {} |
| #define | navigation_SetFlightAltitude(x) |
Functions | |
| void | nav_init (void) |
| Navigation Initialisation. More... | |
| void | nav_run (void) |
| void | set_exception_flag (uint8_t flag_num) |
| struct FloatVect3 | nav_get_speed_sp_from_go (struct EnuCoor_i target, float pos_gain) |
| Go to a waypoint in the shortest way. More... | |
| struct FloatVect3 | nav_get_speed_setpoint (float pos_gain) |
| function that returns a speed setpoint based on flight plan. More... | |
| struct FloatVect3 | nav_get_speed_sp_from_line (struct FloatVect2 line_v, struct FloatVect2 to_end_v, struct EnuCoor_i target, float pos_gain) |
| follow a line. More... | |
| float | get_dist2_to_waypoint (uint8_t wp_id) |
| Returns squared horizontal distance to given waypoint. More... | |
| float | get_dist2_to_point (struct EnuCoor_i *p) |
| Returns squared horizontal distance to given point. More... | |
| void | compute_dist2_to_home (void) |
| Computes squared distance to the HOME waypoint potentially sets too_far_from_home. More... | |
| void | nav_home (void) |
| Home mode navigation (circle around HOME) More... | |
| void | nav_set_manual (int32_t roll, int32_t pitch, int32_t yaw) |
| Set manual roll, pitch and yaw without stabilization. More... | |
| void | nav_reset_reference (void) |
| Reset the geographic reference to the current GPS fix. More... | |
| void | nav_reset_alt (void) |
| Reset the altitude reference to the current GPS alt. More... | |
| void | nav_periodic_task (void) |
| Navigation main: call to the code generated from the XML flight plan. More... | |
| bool | nav_is_in_flight (void) |
| void | nav_set_heading_rad (float rad) |
| Set nav_heading in radians. More... | |
| void | nav_set_heading_deg (float deg) |
| Set nav_heading in degrees. More... | |
| void | nav_set_heading_towards (float x, float y) |
| Set heading to point towards x,y position in local coordinates. More... | |
| void | nav_set_heading_towards_waypoint (uint8_t wp) |
| Set heading in the direction of a waypoint. More... | |
| void | nav_set_heading_towards_target (void) |
| Set heading in the direction of the target. More... | |
| void | nav_set_heading_current (void) |
| Set heading to the current yaw angle. More... | |
| void | nav_set_failsafe (void) |
| bool | nav_detect_ground (void) |
| static void | NavKillThrottle (void) |
| static void | NavResurrect (void) |
| bool | nav_approaching_from (struct EnuCoor_i *wp, struct EnuCoor_i *from, int16_t approaching_time) |
| Proximity tests on approaching a wp. More... | |
| bool | nav_check_wp_time (struct EnuCoor_i *wp, uint16_t stay_time) |
| Check the time spent in a radius of 'ARRIVED_AT_WAYPOINT' around a wp More... | |
| void | navigation_update_wp_from_speed (uint8_t wp, struct Int16Vect3 speed_sp, int16_t heading_rate_sp) |
| static void | NavGotoWaypointHeading (uint8_t wp) |
| static void | NavGotoWaypoint (uint8_t wp) |
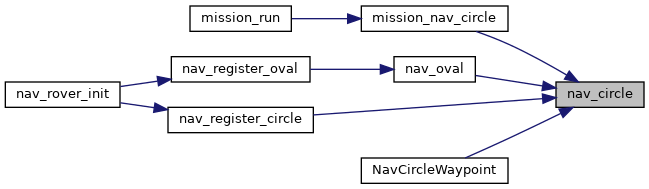
| void | nav_circle (struct EnuCoor_i *wp_center, int32_t radius) |
| static void | NavCircleWaypoint (uint8_t wp_center, float radius) |
| void | nav_oval_init (void) |
| void | nav_oval (uint8_t, uint8_t, float) |
| Navigation along a figure O. More... | |
| void | nav_route (struct EnuCoor_i *wp_start, struct EnuCoor_i *wp_end) |
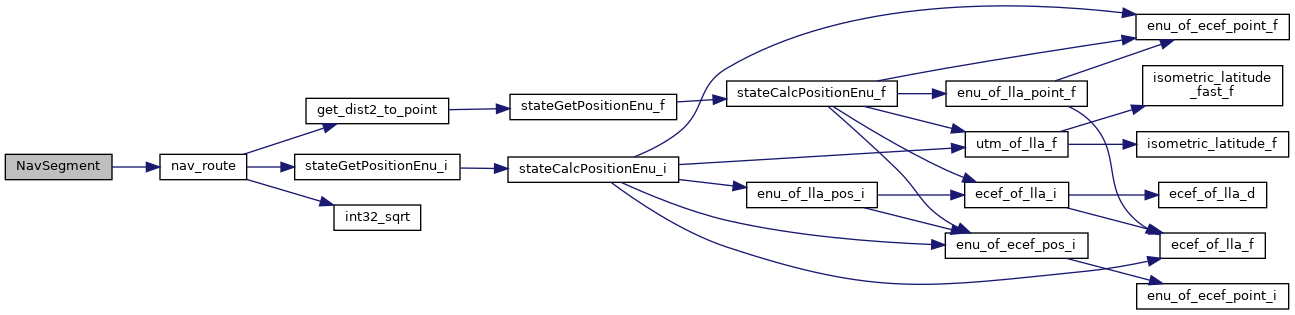
| static void | NavSegment (uint8_t wp_start, uint8_t wp_end) |
| static void | NavGlide (uint8_t start_wp, uint8_t wp) |
| Nav glide routine. More... | |
| void | nav_follow (uint8_t _ac_id, uint32_t distance, uint32_t height) |
Rotorcraft navigation functions.
Definition in file navigation.h.
| #define CARROT 0 |
default approaching_time for a wp
Definition at line 40 of file navigation.h.
| #define CloseDegAngles | ( | _c1, | |
| _c2 | |||
| ) | ({ int32_t _diff = _c1 - _c2; NormCourse(_diff); 350 < _diff || _diff < 10; }) |
Definition at line 263 of file navigation.h.
| #define CloseRadAngles | ( | _c1, | |
| _c2 | |||
| ) | ({ float _diff = _c1 - _c2; NormRadAngle(_diff); fabsf(_diff) < 0.0177; }) |
Definition at line 264 of file navigation.h.
| #define GetAltRef | ( | ) | (state.ned_origin_f.hmsl) |
Get current altitude reference for local coordinates.
This is the ground_alt from the flight plan at first, but might be updated later through a call to NavSetGroundReferenceHere() or NavSetAltitudeReferenceHere(), e.g. in the GeoInit flight plan block.
Definition at line 102 of file navigation.h.
| #define GetPosAlt | ( | ) | (stateGetPositionEnu_f()->z+state.ned_origin_f.hmsl) |
Get current altitude above MSL.
Definition at line 95 of file navigation.h.
| #define GetPosX | ( | ) | (stateGetPositionEnu_f()->x) |
Get current x (east) position in local coordinates.
Definition at line 91 of file navigation.h.
| #define GetPosY | ( | ) | (stateGetPositionEnu_f()->y) |
Get current y (north) position in local coordinates.
Definition at line 93 of file navigation.h.
| #define HORIZONTAL_MODE_ATTITUDE 3 |
Definition at line 56 of file navigation.h.
| #define HORIZONTAL_MODE_CIRCLE 2 |
Definition at line 55 of file navigation.h.
| #define HORIZONTAL_MODE_MANUAL 4 |
Definition at line 57 of file navigation.h.
| #define HORIZONTAL_MODE_ROUTE 1 |
Definition at line 54 of file navigation.h.
| #define HORIZONTAL_MODE_WAYPOINT 0 |
Definition at line 53 of file navigation.h.
| #define NAV_FREQ 16 |
Definition at line 43 of file navigation.h.
| #define nav_IncreaseShift | ( | x | ) | {} |
Definition at line 312 of file navigation.h.
| #define nav_SetNavRadius | ( | x | ) | {} |
Definition at line 313 of file navigation.h.
| #define NavApproaching | ( | wp, | |
| time | |||
| ) | nav_approaching_from(&waypoints[wp].enu_i, NULL, time) |
Definition at line 172 of file navigation.h.
| #define NavApproachingFrom | ( | wp, | |
| from, | |||
| time | |||
| ) | nav_approaching_from(&waypoints[wp].enu_i, &waypoints[from].enu_i, time) |
Definition at line 173 of file navigation.h.
| #define NavAttitude | ( | _roll | ) |
Definition at line 233 of file navigation.h.
| #define NavCheckWaypointTime | ( | wp, | |
| time | |||
| ) | nav_check_wp_time(&waypoints[wp].enu_i, time) |
Definition at line 177 of file navigation.h.
| #define NavCircleCount | ( | ) | ((float)abs(nav_circle_radians) / INT32_ANGLE_2_PI) |
Definition at line 260 of file navigation.h.
| #define NavCircleQdr | ( | ) | ({ int32_t qdr = INT32_DEG_OF_RAD(INT32_ANGLE_PI_2 - nav_circle_qdr) >> INT32_ANGLE_FRAC; NormCourse(qdr); qdr; }) |
Definition at line 261 of file navigation.h.
| #define NavCopyWaypoint waypoint_copy |
Definition at line 166 of file navigation.h.
| #define NavCopyWaypointPositionOnly waypoint_position_copy |
Definition at line 167 of file navigation.h.
| #define NavCourseCloseTo | ( | x | ) | {} |
Definition at line 267 of file navigation.h.
| #define NavDetectGround | ( | ) | nav_detect_ground() |
Definition at line 145 of file navigation.h.
| #define NavFollow nav_follow |
Definition at line 304 of file navigation.h.
| #define NavHeading nav_set_heading_rad |
Set the heading of the rotorcraft, nothing else.
Definition at line 231 of file navigation.h.
| #define navigation_SetFlightAltitude | ( | x | ) |
Definition at line 314 of file navigation.h.
| #define NavQdrCloseTo | ( | x | ) | CloseDegAngles(((x) >> INT32_ANGLE_FRAC), NavCircleQdr()) |
True if x (in degrees) is close to the current QDR (less than 10 degrees)
Definition at line 266 of file navigation.h.
| #define NavSetAltitudeReferenceHere nav_reset_alt |
Definition at line 163 of file navigation.h.
| #define NavSetFailsafe nav_set_failsafe |
Definition at line 159 of file navigation.h.
| #define NavSetGroundReferenceHere nav_reset_reference |
Definition at line 162 of file navigation.h.
| #define NavSetManual nav_set_manual |
Definition at line 158 of file navigation.h.
| #define NavSetWaypointHere waypoint_set_here_2d |
Definition at line 165 of file navigation.h.
Definition at line 144 of file navigation.h.
| #define NavVerticalAltitudeMode | ( | _alt, | |
| _pre_climb | |||
| ) |
Set the vertical mode to altitude control with the specified altitude setpoint and climb pre-command.
Definition at line 213 of file navigation.h.
| #define NavVerticalAutoPitchMode | ( | _throttle | ) | {} |
Set the climb control to auto-pitch with the specified throttle pre-command.
Definition at line 209 of file navigation.h.
| #define NavVerticalAutoThrottleMode | ( | _pitch | ) |
Set the climb control to auto-throttle with the specified pitch pre-command.
Definition at line 203 of file navigation.h.
| #define NavVerticalClimbMode | ( | _climb | ) |
Set the vertical mode to climb control with the specified climb setpoint.
Definition at line 219 of file navigation.h.
| #define NavVerticalThrottleMode | ( | _throttle | ) |
Set the vertical mode to fixed throttle with the specified setpoint.
Definition at line 225 of file navigation.h.
| #define NormCourse | ( | x | ) |
Normalize a degree angle between 0 and 359.
Definition at line 106 of file navigation.h.
| #define VERTICAL_MODE_ALT 2 |
Definition at line 75 of file navigation.h.
| #define VERTICAL_MODE_CLIMB 1 |
Definition at line 74 of file navigation.h.
| #define VERTICAL_MODE_MANUAL 0 |
Definition at line 73 of file navigation.h.
| void compute_dist2_to_home | ( | void | ) |
Computes squared distance to the HOME waypoint potentially sets too_far_from_home.
Computes squared distance to the HOME waypoint potentially sets too_far_from_home.
Updates dist2_to_home and potentially sets too_far_from_home
Definition at line 478 of file navigation.c.
| float get_dist2_to_point | ( | struct EnuCoor_i * | p | ) |
Returns squared horizontal distance to given point.
Definition at line 460 of file navigation.c.
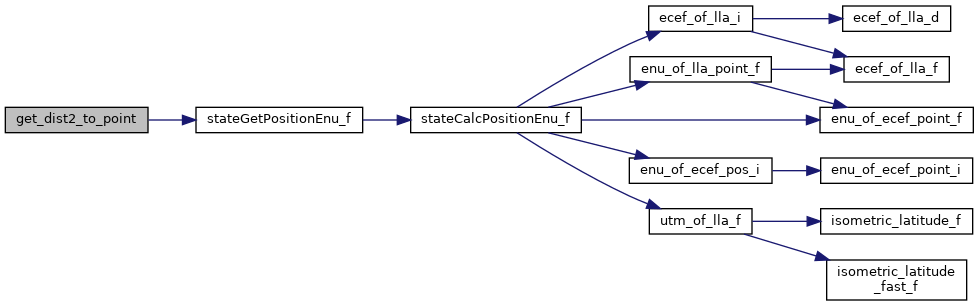
References p, pos_diff, POS_FLOAT_OF_BFP, stateGetPositionEnu_f(), FloatVect2::x, EnuCoor_f::x, FloatVect2::y, and EnuCoor_f::y.
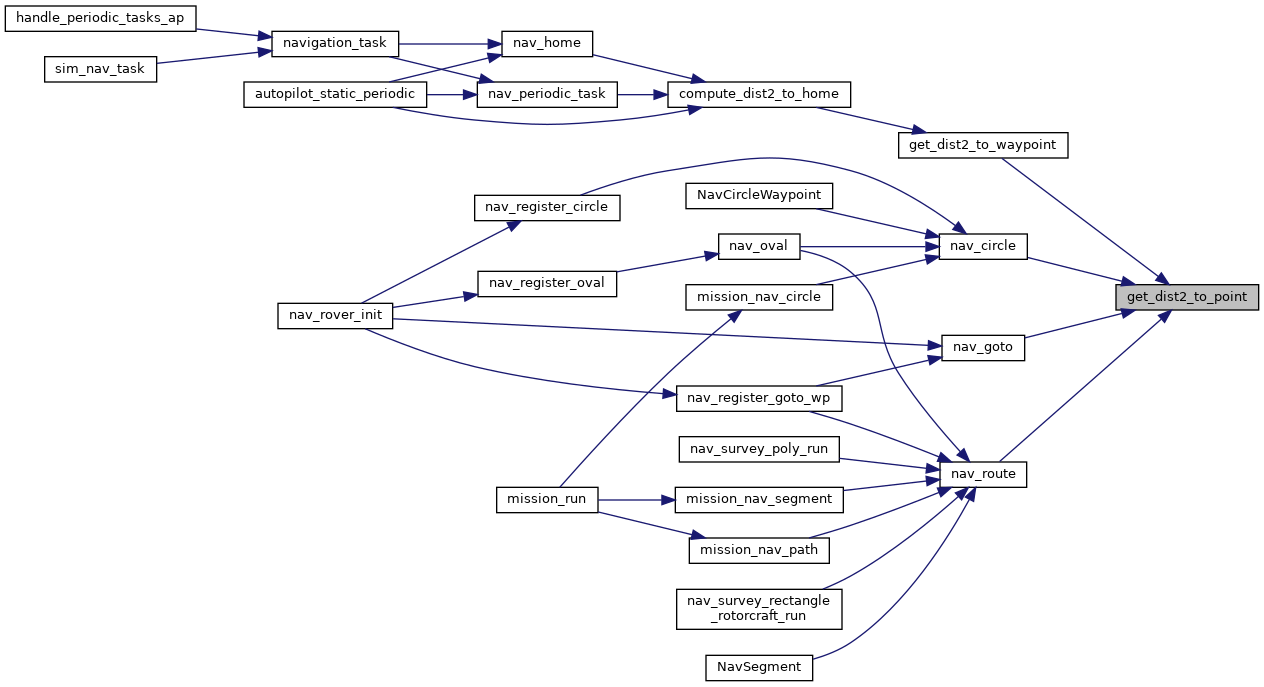
Referenced by get_dist2_to_waypoint(), nav_circle(), nav_goto(), and nav_route().
Here is the call graph for this function: Here is the caller graph for this function:| float get_dist2_to_waypoint | ( | uint8_t | wp_id | ) |
Returns squared horizontal distance to given waypoint.
Definition at line 470 of file navigation.c.
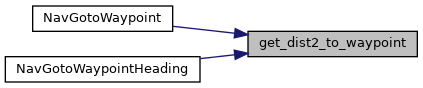
Referenced by NavGotoWaypoint(), and NavGotoWaypointHeading().
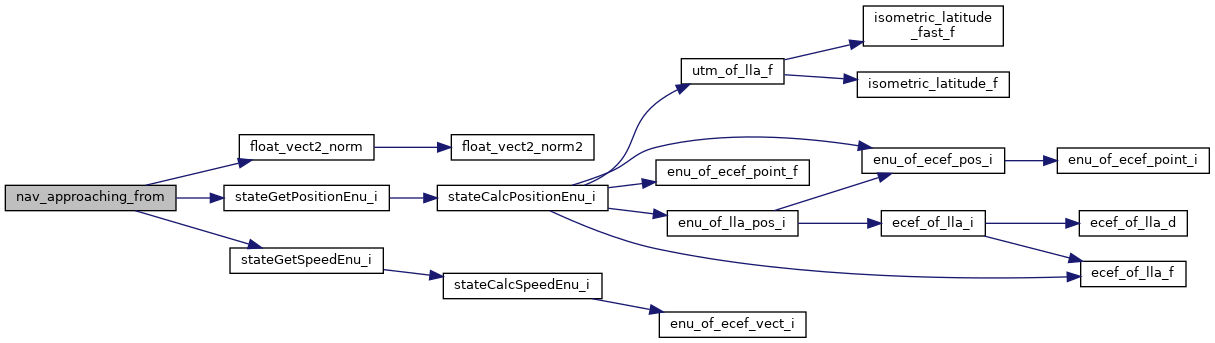
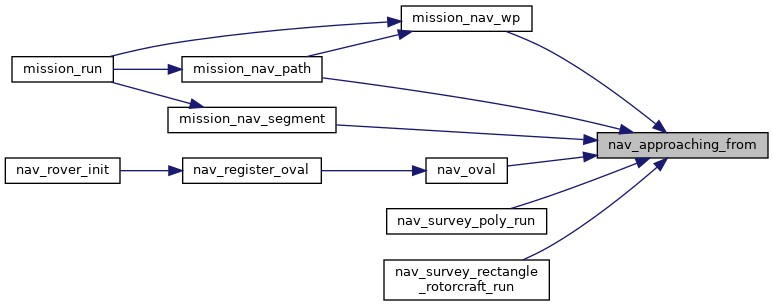
Here is the caller graph for this function:| bool nav_approaching_from | ( | struct EnuCoor_i * | wp, |
| struct EnuCoor_i * | from, | ||
| int16_t | approaching_time | ||
| ) |
Proximity tests on approaching a wp.
Definition at line 262 of file navigation.c.
References ARRIVED_AT_WAYPOINT, float_vect2_norm(), INT32_POS_FRAC, INT32_SPEED_FRAC, INT32_VECT2_RSHIFT, POS_FLOAT_OF_BFP, stateGetPositionEnu_i(), stateGetSpeedEnu_i(), VECT2_DIFF, VECT2_SMUL, VECT2_SUM, FloatVect2::x, Int32Vect2::x, FloatVect2::y, and Int32Vect2::y.
Referenced by mission_nav_path(), mission_nav_segment(), mission_nav_wp(), nav_oval(), nav_survey_poly_run(), and nav_survey_rectangle_rotorcraft_run().
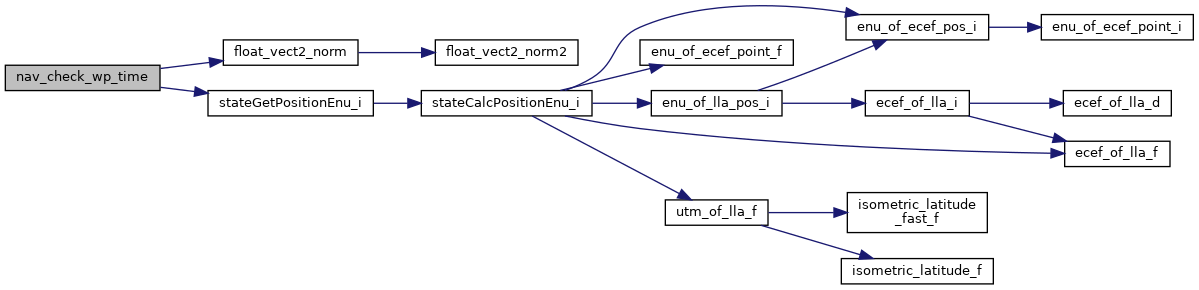
Here is the call graph for this function: Here is the caller graph for this function:Check the time spent in a radius of 'ARRIVED_AT_WAYPOINT' around a wp
Definition at line 306 of file navigation.c.
References ARRIVED_AT_WAYPOINT, autopilot, pprz_autopilot::flight_time, float_vect2_norm(), INT_VECT3_ZERO, POS_FLOAT_OF_BFP, stateGetPositionEnu_i(), VECT2_DIFF, EnuCoor_i::x, Int32Vect2::x, EnuCoor_i::y, and Int32Vect2::y.
Referenced by mission_nav_path(), mission_nav_segment(), and mission_nav_wp().
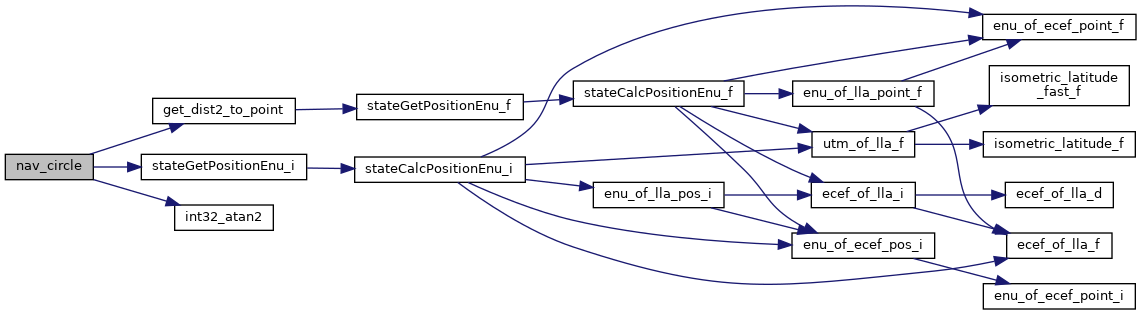
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 543 of file navigation.c.
References CARROT_DIST, dist2_to_wp, get_dist2_to_point(), horizontal_mode, HORIZONTAL_MODE_CIRCLE, INT32_ANGLE_FRAC, INT32_ANGLE_NORMALIZE, INT32_ANGLE_PI, INT32_ANGLE_PI_4, int32_atan2(), INT32_TRIG_FRAC, INT32_VECT2_RSHIFT, nav_circle_center, nav_circle_qdr, nav_circle_radians, nav_circle_radius, navigation_target, pos_diff, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, stateGetPositionEnu_i(), VECT2_ASSIGN, VECT2_COPY, VECT2_DIFF, VECT2_SUM, FloatVect2::x, and FloatVect2::y.
Referenced by mission_nav_circle(), nav_oval(), nav_register_circle(), and NavCircleWaypoint().
Here is the call graph for this function: Here is the caller graph for this function:| bool nav_detect_ground | ( | void | ) |
Definition at line 413 of file navigation.c.
References autopilot, and pprz_autopilot::ground_detected.
Definition at line 743 of file navigation.c.
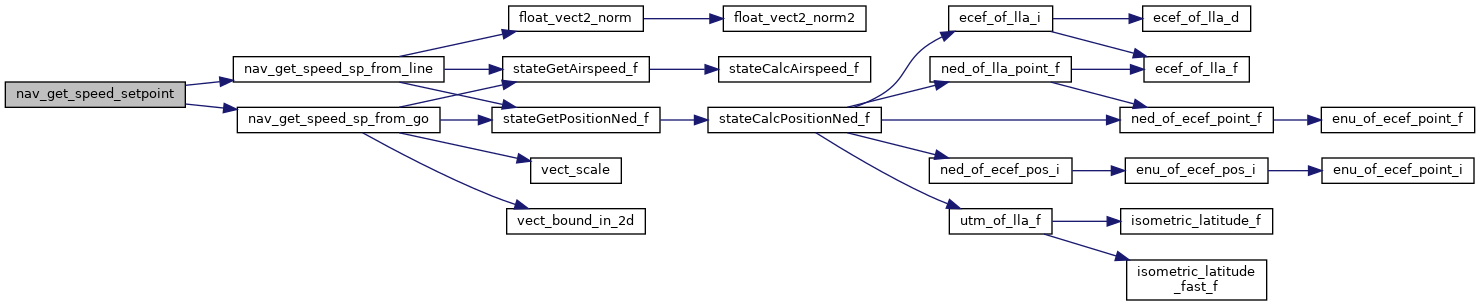
| struct FloatVect3 nav_get_speed_setpoint | ( | float | pos_gain | ) |
function that returns a speed setpoint based on flight plan.
The routines are meant for a hybrid UAV and assume measurement of airspeed. Makes the vehicle track a vector field with a sink at a waypoint. Use force_forward to maintain airspeed and fly 'through' waypoints.
Definition at line 506 of file guidance_indi_hybrid.c.
References horizontal_mode, HORIZONTAL_MODE_ROUTE, nav_get_speed_sp_from_go(), nav_get_speed_sp_from_line(), navigation_target, speed_sp, and to_end_vect.
Referenced by guidance_indi_run().
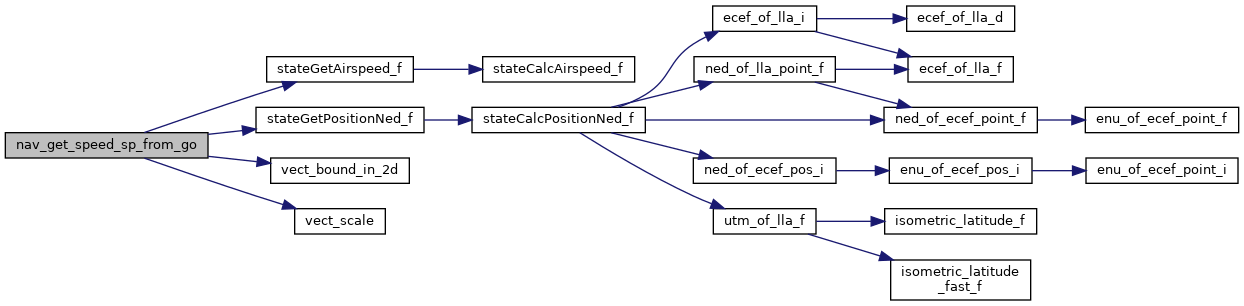
Here is the call graph for this function: Here is the caller graph for this function:| struct FloatVect3 nav_get_speed_sp_from_go | ( | struct EnuCoor_i | target, |
| float | pos_gain | ||
| ) |
Go to a waypoint in the shortest way.
| target | the target waypoint |
Definition at line 611 of file guidance_indi_hybrid.c.
References FLOAT_VECT2_NORM, force_forward, gih_params, guidance_v_mode, GUIDANCE_V_MODE_NAV, guidance_v_zd_sp, MAX_DECELERATION, Min, nav_climb_vspeed, nav_descend_vspeed, nav_max_speed, POS_FLOAT_OF_BFP, guidance_indi_hybrid_params::pos_gainz, SPEED_FLOAT_OF_BFP, stateGetAirspeed_f(), stateGetPositionNed_f(), target, VECT3_ASSIGN, VECT3_DIFF, VECT3_SMUL, vect_bound_in_2d(), vect_scale(), vertical_mode, VERTICAL_MODE_CLIMB, FloatVect2::x, FloatVect2::y, and FloatVect3::z.
Referenced by nav_get_speed_setpoint().
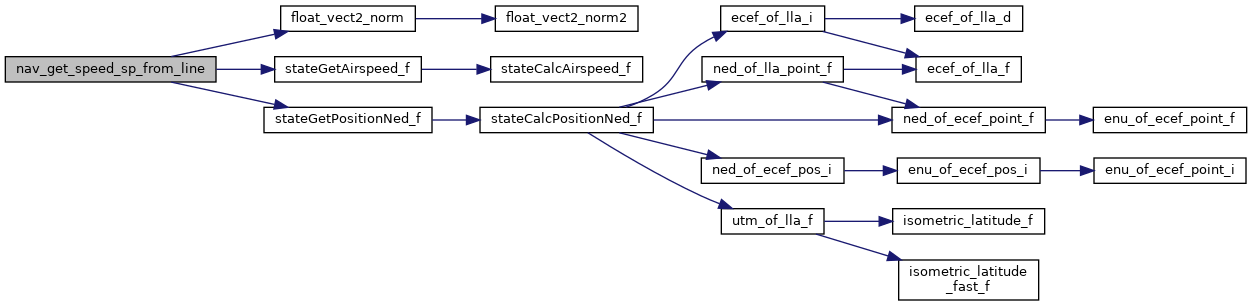
Here is the call graph for this function: Here is the caller graph for this function:| struct FloatVect3 nav_get_speed_sp_from_line | ( | struct FloatVect2 | line_v_enu, |
| struct FloatVect2 | to_end_v_enu, | ||
| struct EnuCoor_i | target, | ||
| float | pos_gain | ||
| ) |
follow a line.
| line_v_enu | 2d vector from beginning (0) line to end in enu |
| to_end_v_enu | 2d vector from current position to end in enu |
| target | end waypoint in enu |
Definition at line 525 of file guidance_indi_hybrid.c.
References direction, float_vect2_norm(), force_forward, gih_params, guidance_v_mode, GUIDANCE_V_MODE_NAV, guidance_v_zd_sp, nav_climb_vspeed, nav_descend_vspeed, nav_max_speed, POS_FLOAT_OF_BFP, guidance_indi_hybrid_params::pos_gainz, SPEED_FLOAT_OF_BFP, stateGetAirspeed_f(), stateGetPositionNed_f(), target, VECT2_ADD, VECT2_ASSIGN, VECT2_SMUL, VECT3_ASSIGN, vertical_mode, VERTICAL_MODE_CLIMB, FloatVect2::x, FloatVect2::y, FloatVect3::z, and NedCoor_f::z.
Referenced by nav_get_speed_setpoint().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_home | ( | void | ) |
| bool nav_is_in_flight | ( | void | ) |
Definition at line 420 of file navigation.c.
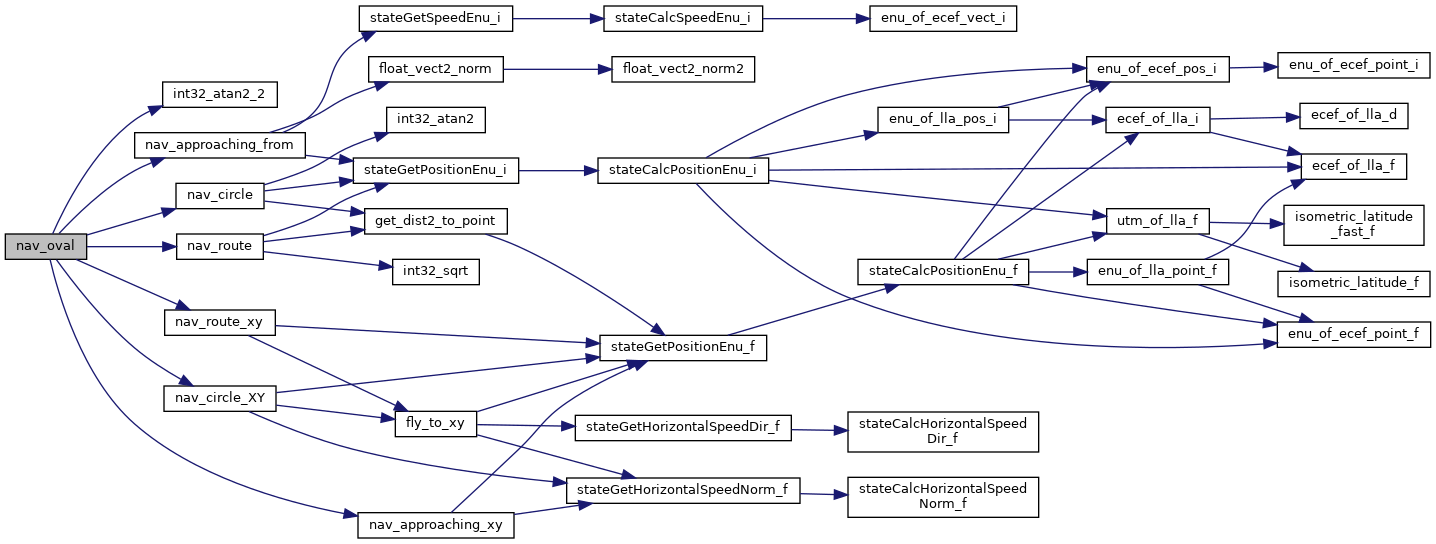
Navigation along a figure O.
One side leg is defined by waypoints [p1] and [p2]. The navigation goes through 4 states: OC1 (half circle next to [p1]), OR21 (route [p2] to [p1], OC2 (half circle next to [p2]) and OR12 (opposite leg). Initial state is the route along the desired segment (OC2).
Definition at line 733 of file nav.c.
References point::a, ANGLE_BFP_OF_REAL, CARROT, InitStage, INT32_ANGLE_PI, int32_atan2_2(), INT32_DEG_OF_RAD, LINE_START_FUNCTION, LINE_STOP_FUNCTION, nav_approaching_from(), nav_approaching_xy(), nav_circle(), nav_circle_XY(), nav_oval_count, nav_route(), nav_route_xy(), NavQdrCloseTo, OC1, OC2, OR12, OR21, POS_BFP_OF_REAL, waypoints, point::x, and point::y.
Referenced by nav_register_oval().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_oval_init | ( | void | ) |
Definition at line 727 of file nav.c.
References nav_oval_count, and OC2.
Referenced by nav_register_oval().
Here is the caller graph for this function:| void nav_periodic_task | ( | void | ) |
| void nav_reset_alt | ( | void | ) |
Reset the altitude reference to the current GPS alt.
Definition at line 360 of file navigation.c.
| void nav_reset_reference | ( | void | ) |
Reset the geographic reference to the current GPS fix.
Definition at line 353 of file navigation.c.
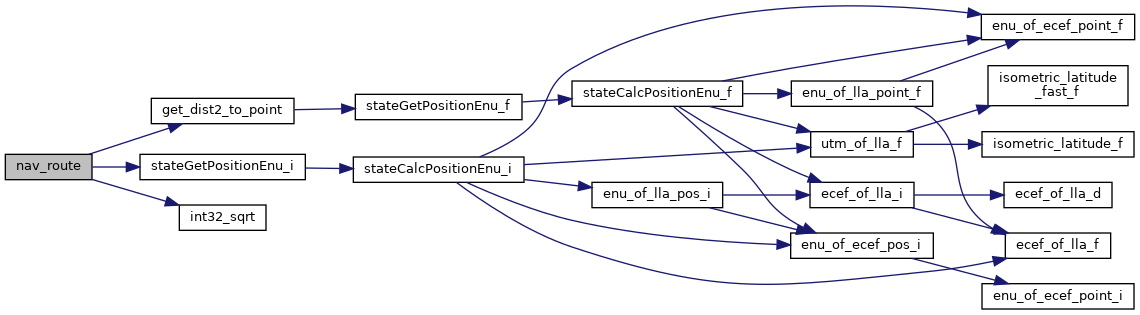
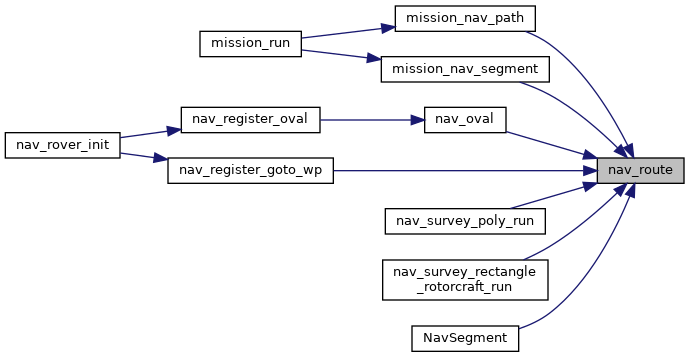
Definition at line 589 of file navigation.c.
References CARROT_DIST, dist2_to_wp, get_dist2_to_point(), horizontal_mode, HORIZONTAL_MODE_ROUTE, INT32_POS_FRAC, int32_sqrt(), INT32_VECT2_RSHIFT, Max, nav_leg_length, nav_leg_progress, nav_segment_end, navigation_target, pos_diff, stateGetPositionEnu_i(), VECT2_COPY, VECT2_DIFF, VECT2_SMUL, VECT2_SUM, FloatVect2::x, Int32Vect2::x, FloatVect2::y, and Int32Vect2::y.
Referenced by mission_nav_path(), mission_nav_segment(), nav_oval(), nav_register_goto_wp(), nav_survey_poly_run(), nav_survey_rectangle_rotorcraft_run(), and NavSegment().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_run | ( | void | ) |
Definition at line 248 of file navigation.c.
| void nav_set_failsafe | ( | void | ) |
Definition at line 533 of file navigation.c.
| void nav_set_heading_current | ( | void | ) |
Set heading to the current yaw angle.
Definition at line 528 of file navigation.c.
| void nav_set_heading_deg | ( | float | deg | ) |
Set nav_heading in degrees.
Definition at line 496 of file navigation.c.
| void nav_set_heading_rad | ( | float | rad | ) |
Set nav_heading in radians.
Definition at line 489 of file navigation.c.
| void nav_set_heading_towards | ( | float | x, |
| float | y | ||
| ) |
Set heading to point towards x,y position in local coordinates.
Definition at line 502 of file navigation.c.
| void nav_set_heading_towards_target | ( | void | ) |
Set heading in the direction of the target.
Definition at line 521 of file navigation.c.
| void nav_set_heading_towards_waypoint | ( | uint8_t | wp | ) |
Set heading in the direction of a waypoint.
Definition at line 515 of file navigation.c.
Referenced by NavGotoWaypointHeading().
Here is the caller graph for this function:Set manual roll, pitch and yaw without stabilization.
| [in] | roll | command in pprz scale (int32_t) |
| [in] | pitch | command in pprz scale (int32_t) |
| [in] | yaw | command in pprz scale (int32_t) |
This function allows to directly set commands from the flight plan, if in nav_manual mode. This is for instance useful for helicopters during the spinup
Definition at line 451 of file navigation.c.
References horizontal_mode, HORIZONTAL_MODE_MANUAL, nav_cmd_pitch, nav_cmd_roll, and nav_cmd_yaw.
|
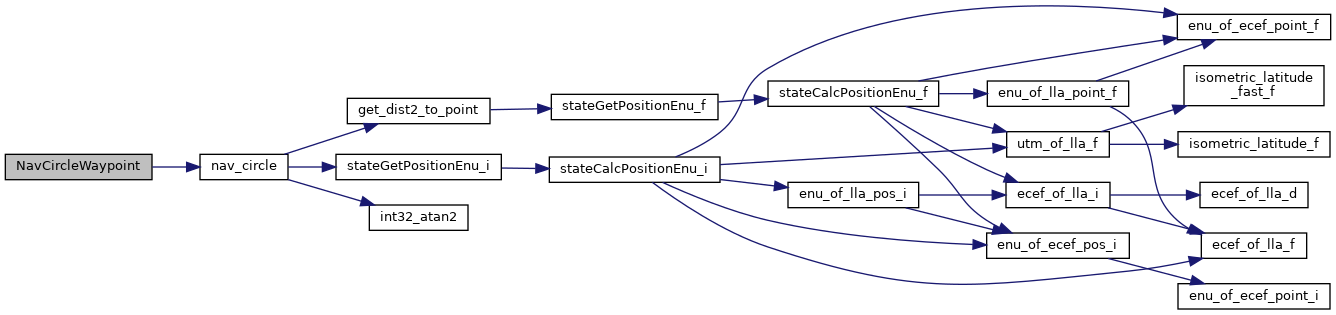
inlinestatic |
Definition at line 254 of file navigation.h.
References horizontal_mode, HORIZONTAL_MODE_CIRCLE, nav_circle(), POS_BFP_OF_REAL, and waypoints.
Here is the call graph for this function:Nav glide routine.
Definition at line 295 of file navigation.h.
References nav_leg_length, nav_leg_progress, NavVerticalAltitudeMode, POS_FLOAT_OF_BFP, and waypoints.
|
inlinestatic |
Definition at line 245 of file navigation.h.
References dist2_to_wp, get_dist2_to_waypoint(), horizontal_mode, HORIZONTAL_MODE_WAYPOINT, navigation_target, VECT3_COPY, and waypoints.
Here is the call graph for this function:
|
inlinestatic |
Definition at line 186 of file navigation.h.
References dist2_to_wp, get_dist2_to_waypoint(), horizontal_mode, HORIZONTAL_MODE_WAYPOINT, nav_set_heading_towards_waypoint(), navigation_target, VECT3_COPY, vertical_mode, VERTICAL_MODE_ALT, and waypoints.
Here is the call graph for this function:| void navigation_update_wp_from_speed | ( | uint8_t | wp, |
| struct Int16Vect3 | speed_sp, | ||
| int16_t | heading_rate_sp | ||
| ) |
Definition at line 389 of file navigation.c.
References DefaultChannel, DefaultDevice, INT32_COURSE_NORMALIZE, INT32_POS_FRAC, INT32_SPEED_FRAC, INT32_TRIG_FRAC, INT32_VECT3_RSHIFT, NAV_FREQ, nav_heading, PPRZ_ITRIG_COS, PPRZ_ITRIG_SIN, speed_sp, VECT3_SDIV, waypoints, point::x, Int32Vect3::x, point::y, Int32Vect3::y, and Int32Vect3::z.
Referenced by vi_update_wp().
Here is the caller graph for this function:
|
inlinestatic |
Definition at line 148 of file navigation.h.
References AP_MODE_NAV, autopilot_get_mode(), autopilot_set_motors_on(), and FALSE.
Here is the call graph for this function:
|
inlinestatic |
Definition at line 152 of file navigation.h.
References AP_MODE_NAV, autopilot_get_mode(), autopilot_set_motors_on(), and TRUE.
Here is the call graph for this function:Definition at line 287 of file navigation.h.
References horizontal_mode, HORIZONTAL_MODE_ROUTE, nav_route(), and waypoints.
Here is the call graph for this function:| void set_exception_flag | ( | uint8_t | flag_num | ) |
Definition at line 130 of file navigation.c.
| float dist2_to_home |
squared distance to home waypoint
Definition at line 86 of file navigation.c.
| float dist2_to_wp |
squared distance to next waypoint
Definition at line 89 of file navigation.c.
Referenced by NavGotoWaypoint(), and NavGotoWaypointHeading().
| bool exception_flag[10] |
Definition at line 98 of file navigation.c.
Referenced by set_exception_flag().
| float failsafe_mode_dist2 |
maximum squared distance to home wp before going to failsafe mode
Definition at line 85 of file navigation.c.
Referenced by autopilot_static_periodic().
| float flight_altitude |
Dynamically adjustable, reset to nav_altitude when it is changing.
Definition at line 75 of file nav.c.
Referenced by formation_flight(), nav_init(), and nav_set_altitude().
| bool force_forward |
Definition at line 79 of file navigation.c.
Referenced by nav_get_speed_sp_from_go(), and nav_get_speed_sp_from_line().
| uint8_t horizontal_mode |
Definition at line 71 of file nav.c.
Referenced by guidance_h_from_nav(), gvf_ellipse_XY(), gvf_line(), gvf_line_XY1_XY2(), gvf_parametric_3D_ellipse_XYZ(), gvf_segment_loop_XY1_XY2(), mission_nav_circle(), mission_nav_path(), mission_nav_segment(), mission_nav_wp(), nav_circle(), nav_circle_XY(), nav_get_speed_setpoint(), nav_heli_spinup_run(), nav_heli_spinup_setup(), nav_home(), nav_init(), nav_route(), nav_route_xy(), nav_set_manual(), nav_survey_poly_run(), nav_survey_rectangle_rotorcraft_run(), nav_survey_rectangle_rotorcraft_setup(), NavCircleWaypoint(), NavGotoWaypoint(), NavGotoWaypointHeading(), NavSegment(), send_mode(), and send_nav_status().
| uint8_t last_wp |
| int32_t nav_altitude |
Definition at line 71 of file navigation.h.
| int32_t nav_circle_qdr |
Definition at line 52 of file navigation.h.
| int32_t nav_circle_radians |
Status on the current circle.
Definition at line 52 of file navigation.h.
| int32_t nav_circle_radius |
Definition at line 69 of file nav.c.
Referenced by flight_benchmark_periodic(), nav_circle(), nav_circle_XY(), and send_circle().
| int32_t nav_climb |
Definition at line 57 of file nav.c.
Referenced by guidance_v_from_nav(), and nav_init().
| float nav_climb_vspeed |
Definition at line 111 of file navigation.c.
Referenced by nav_get_speed_sp_from_go(), nav_get_speed_sp_from_line(), and nav_init().
| int32_t nav_cmd_pitch |
Definition at line 60 of file navigation.h.
| int32_t nav_cmd_roll |
Definition at line 109 of file navigation.c.
Referenced by guidance_h_from_nav(), nav_heli_spinup_run(), nav_heli_spinup_setup(), nav_init(), and nav_set_manual().
| int32_t nav_cmd_yaw |
Definition at line 60 of file navigation.h.
| float nav_descend_vspeed |
Definition at line 62 of file navigation.h.
| int32_t nav_flight_altitude |
Definition at line 71 of file navigation.h.
| int32_t nav_heading |
with INT32_ANGLE_FRAC
Definition at line 108 of file navigation.c.
Referenced by follow_me(), guidance_h_from_nav(), guidance_h_nav_enter(), increase_nav_heading(), ins_ekf2_publish_attitude(), nav_init(), nav_set_heading_current(), nav_set_heading_rad(), nav_set_heading_towards(), navigation_update_wp_from_speed(), object_tracking_run(), rotorcraft_cam_periodic(), run_avoid_navigation_onvision(), and stereocam_droplet_periodic().
| uint32_t nav_leg_length |
Definition at line 103 of file navigation.c.
Referenced by nav_init(), nav_route(), and NavGlide().
| int32_t nav_leg_progress |
Definition at line 102 of file navigation.c.
Referenced by nav_init(), nav_route(), and NavGlide().
| float nav_max_speed |
Referenced by nav_get_speed_sp_from_go(), and nav_get_speed_sp_from_line().
| uint8_t nav_oval_count |
Navigation along a figure O.
One side leg is defined by waypoints [p1] and [p2]. The navigation goes through 4 states: OC1 (half circle next to [p1]), OR21 (route [p2] to [p1], OC2 (half circle next to [p2]) and OR12 (opposite leg).
Initial state is the route along the desired segment (OC2).
Definition at line 725 of file nav.c.
Referenced by nav_oval(), and nav_oval_init().
| int32_t nav_pitch |
with INT32_ANGLE_FRAC
Definition at line 58 of file navigation.h.
| float nav_radius |
Definition at line 57 of file nav.c.
Referenced by nav_compute_baseleg(), nav_flower_run(), nav_init(), and parachute_compute_approach().
| int32_t nav_roll |
Definition at line 107 of file navigation.c.
Referenced by guidance_h_from_nav(), and nav_init().
| bool nav_survey_active |
Definition at line 89 of file nav.c.
Referenced by nav_periodic_task(), nav_survey_rectangle(), nav_survey_rectangle_rotorcraft_run(), and send_survey().
| uint32_t nav_throttle |
direct throttle from 0:MAX_PPRZ, used in VERTICAL_MODE_MANUAL
Definition at line 114 of file navigation.c.
Referenced by guidance_v_from_nav(), nav_heli_spinup_run(), nav_heli_spinup_setup(), and nav_init().
| struct EnuCoor_i navigation_carrot |
Definition at line 92 of file navigation.c.
Referenced by guidance_h_from_nav(), guidance_h_nav_enter(), nav_advance_carrot(), nav_init(), and nav_run().
| struct EnuCoor_i navigation_target |
Definition at line 91 of file navigation.c.
Referenced by guidance_h_from_nav(), mission_nav_wp(), nav_advance_carrot(), nav_circle(), nav_get_speed_setpoint(), nav_home(), nav_init(), nav_route(), nav_run(), nav_set_heading_towards_target(), nav_survey_poly_run(), nav_survey_rectangle_rotorcraft_setup(), NavGotoWaypoint(), and NavGotoWaypointHeading().
| struct FloatVect2 line_vect to_end_vect |
Definition at line 81 of file navigation.c.
Referenced by nav_get_speed_setpoint(), and nav_init().
| bool too_far_from_home |
Definition at line 87 of file navigation.c.
| uint8_t vertical_mode |
Definition at line 35 of file sim_ap.c.
Referenced by guidance_v_from_nav(), nav_get_speed_sp_from_go(), nav_get_speed_sp_from_line(), nav_heli_spinup_run(), nav_heli_spinup_setup(), nav_home(), nav_init(), and NavGotoWaypointHeading().
 1.8.17
1.8.17