|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
 Collaboration diagram for Position representations:
Collaboration diagram for Position representations:Macros | |
| #define | POS_ECEF_I 0 |
| #define | POS_NED_I 1 |
| #define | POS_ENU_I 2 |
| #define | POS_LLA_I 3 |
| #define | POS_UTM_I 4 |
| #define | POS_ECEF_F 5 |
| #define | POS_NED_F 6 |
| #define | POS_ENU_F 7 |
| #define | POS_LLA_F 8 |
| #define | POS_UTM_F 9 |
| #define | POS_LOCAL_COORD ((1<<POS_NED_I)|(1<<POS_NED_F)|(1<<POS_ENU_I)|(1<<POS_ENU_F)) |
| #define | POS_GLOBAL_COORD ((1<<POS_ECEF_I)|(1<<POS_ECEF_F)|(1<<POS_LLA_I)|(1<<POS_LLA_F)|(1<<POS_UTM_I)|(1<<POS_UTM_F)) |
Functions | |
| void | stateCalcPositionEcef_i (void) |
| void | stateCalcPositionNed_i (void) |
| void | stateCalcPositionEnu_i (void) |
| void | stateCalcPositionLla_i (void) |
| Calculate LLA (int) from any other available representation. More... | |
| void | stateCalcPositionUtm_f (void) |
| void | stateCalcPositionEcef_f (void) |
| void | stateCalcPositionNed_f (void) |
| void | stateCalcPositionEnu_f (void) |
| void | stateCalcPositionLla_f (void) |
| static void | stateSetLocalOrigin_i (struct LtpDef_i *ltp_def) |
| Set the local (flat earth) coordinate frame origin (int). More... | |
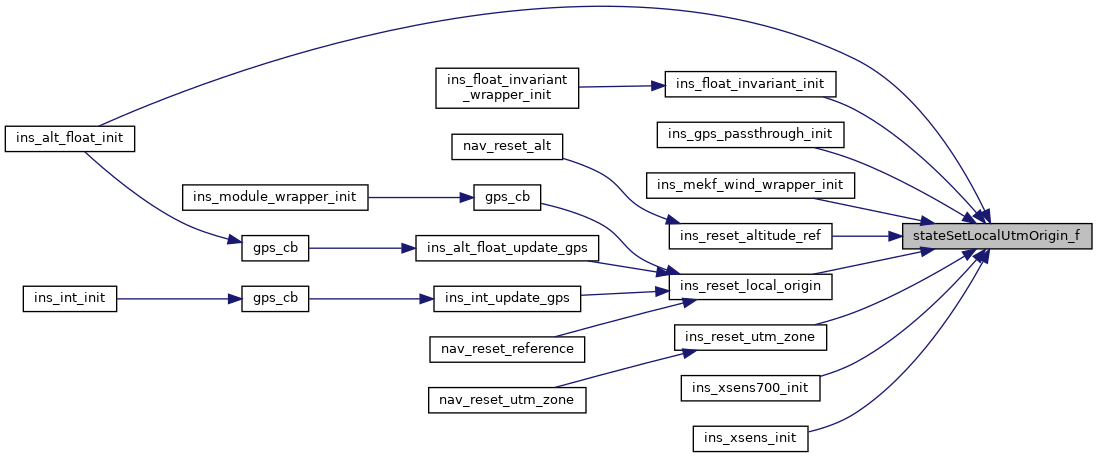
| static void | stateSetLocalUtmOrigin_f (struct UtmCoor_f *utm_def) |
| Set the local (flat earth) coordinate frame origin from UTM (float). More... | |
| static bool | stateIsLocalCoordinateValid (void) |
| Test if local coordinates are valid. More... | |
| static bool | stateIsGlobalCoordinateValid (void) |
| Test if global coordinates are valid. More... | |
| static void | stateSetPositionEcef_i (struct EcefCoor_i *ecef_pos) |
| Set position from ECEF coordinates (int). More... | |
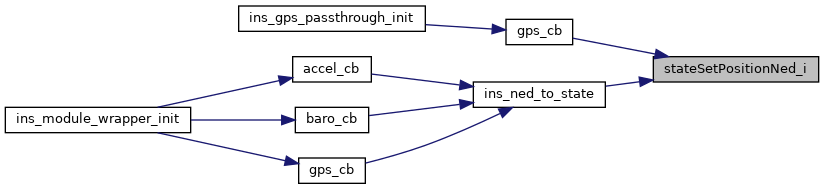
| static void | stateSetPositionNed_i (struct NedCoor_i *ned_pos) |
| Set position from local NED coordinates (int). More... | |
| static void | stateSetPositionEnu_i (struct EnuCoor_i *enu_pos) |
| Set position from local ENU coordinates (int). More... | |
| static void | stateSetPositionLla_i (struct LlaCoor_i *lla_pos) |
| Set position from LLA coordinates (int). More... | |
| static void | stateSetPosition_i (struct EcefCoor_i *ecef_pos, struct NedCoor_i *ned_pos, struct EnuCoor_i *enu_pos, struct LlaCoor_i *lla_pos) |
| Set multiple position coordinates (int). More... | |
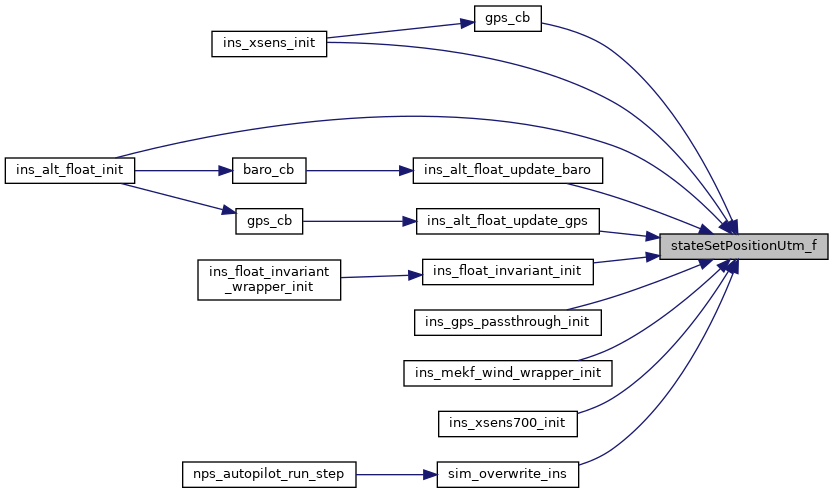
| static void | stateSetPositionUtm_f (struct UtmCoor_f *utm_pos) |
| Set position from UTM coordinates (float). More... | |
| static void | stateSetPositionEcef_f (struct EcefCoor_f *ecef_pos) |
| Set position from ECEF coordinates (float). More... | |
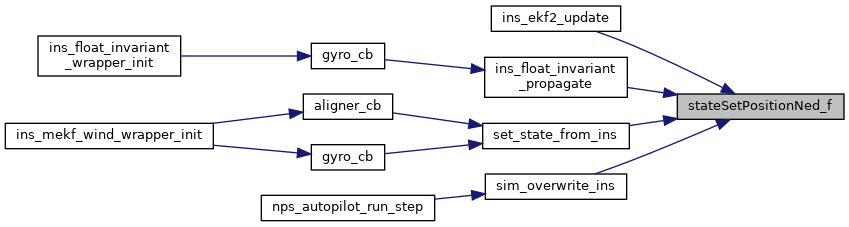
| static void | stateSetPositionNed_f (struct NedCoor_f *ned_pos) |
| Set position from local NED coordinates (float). More... | |
| static void | stateSetPositionEnu_f (struct EnuCoor_f *enu_pos) |
| Set position from local ENU coordinates (float). More... | |
| static void | stateSetPositionLla_f (struct LlaCoor_f *lla_pos) |
| Set position from LLA coordinates (float). More... | |
| static void | stateSetPosition_f (struct EcefCoor_f *ecef_pos, struct NedCoor_f *ned_pos, struct EnuCoor_f *enu_pos, struct LlaCoor_f *lla_pos, struct UtmCoor_f *utm_pos) |
| Set multiple position coordinates (float). More... | |
| static struct EcefCoor_i * | stateGetPositionEcef_i (void) |
| Get position in ECEF coordinates (int). More... | |
| static struct NedCoor_i * | stateGetPositionNed_i (void) |
| Get position in local NED coordinates (int). More... | |
| static struct EnuCoor_i * | stateGetPositionEnu_i (void) |
| Get position in local ENU coordinates (int). More... | |
| static struct LlaCoor_i * | stateGetPositionLla_i (void) |
| Get position in LLA coordinates (int). More... | |
| static struct UtmCoor_f * | stateGetPositionUtm_f (void) |
| Get position in UTM coordinates (float). More... | |
| static struct EcefCoor_f * | stateGetPositionEcef_f (void) |
| Get position in ECEF coordinates (float). More... | |
| static struct NedCoor_f * | stateGetPositionNed_f (void) |
| Get position in local NED coordinates (float). More... | |
| static struct EnuCoor_f * | stateGetPositionEnu_f (void) |
| Get position in local ENU coordinates (float). More... | |
| static struct LlaCoor_f * | stateGetPositionLla_f (void) |
| Get position in LLA coordinates (float). More... | |
Variables | |
| uint16_t | State::pos_status |
| Holds the status bits for all position representations. More... | |
| struct EcefCoor_i | State::ecef_pos_i |
| Position in EarthCenteredEarthFixed coordinates. More... | |
| struct LlaCoor_i | State::lla_pos_i |
| Position in Latitude, Longitude and Altitude. More... | |
| struct LtpDef_i | State::ned_origin_i |
| Definition of the local (flat earth) coordinate system. More... | |
| bool | State::ned_initialized_i |
| true if local int coordinate frame is initialsed More... | |
| struct NedCoor_i | State::ned_pos_i |
| Position in North East Down coordinates. More... | |
| struct EnuCoor_i | State::enu_pos_i |
| Position in East North Up coordinates. More... | |
| struct UtmCoor_f | State::utm_pos_f |
| Position in UTM coordinates. More... | |
| float | State::alt_agl_f |
| Altitude above ground level. More... | |
| struct LlaCoor_f | State::lla_pos_f |
| Position in Latitude, Longitude and Altitude. More... | |
| struct EcefCoor_f | State::ecef_pos_f |
| Position in EarthCenteredEarthFixed coordinates. More... | |
| struct LtpDef_f | State::ned_origin_f |
| Definition of the local (flat earth) coordinate system. More... | |
| bool | State::ned_initialized_f |
| True if local float coordinate frame is initialsed. More... | |
| struct UtmCoor_f | State::utm_origin_f |
| Definition of the origin of Utm coordinate system. More... | |
| bool | State::utm_initialized_f |
| True if utm origin (float) coordinate frame is initialsed. More... | |
| struct NedCoor_f | State::ned_pos_f |
| Position in North East Down coordinates. More... | |
| struct EnuCoor_f | State::enu_pos_f |
| Position in East North Up coordinates. More... | |
| #define POS_GLOBAL_COORD ((1<<POS_ECEF_I)|(1<<POS_ECEF_F)|(1<<POS_LLA_I)|(1<<POS_LLA_F)|(1<<POS_UTM_I)|(1<<POS_UTM_F)) |
| void stateCalcPositionEcef_f | ( | void | ) |
Definition at line 402 of file state.c.
References ECEF_FLOAT_OF_BFP, ecef_of_lla_f(), ecef_of_ned_point_f(), ecef_of_ned_pos_i(), State::ecef_pos_f, State::ecef_pos_i, LLA_FLOAT_OF_BFP, State::lla_pos_f, State::lla_pos_i, State::ned_initialized_f, State::ned_initialized_i, State::ned_origin_f, State::ned_origin_i, State::ned_pos_f, State::ned_pos_i, POS_ECEF_F, POS_ECEF_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, and state.
Referenced by stateGetPositionEcef_f().
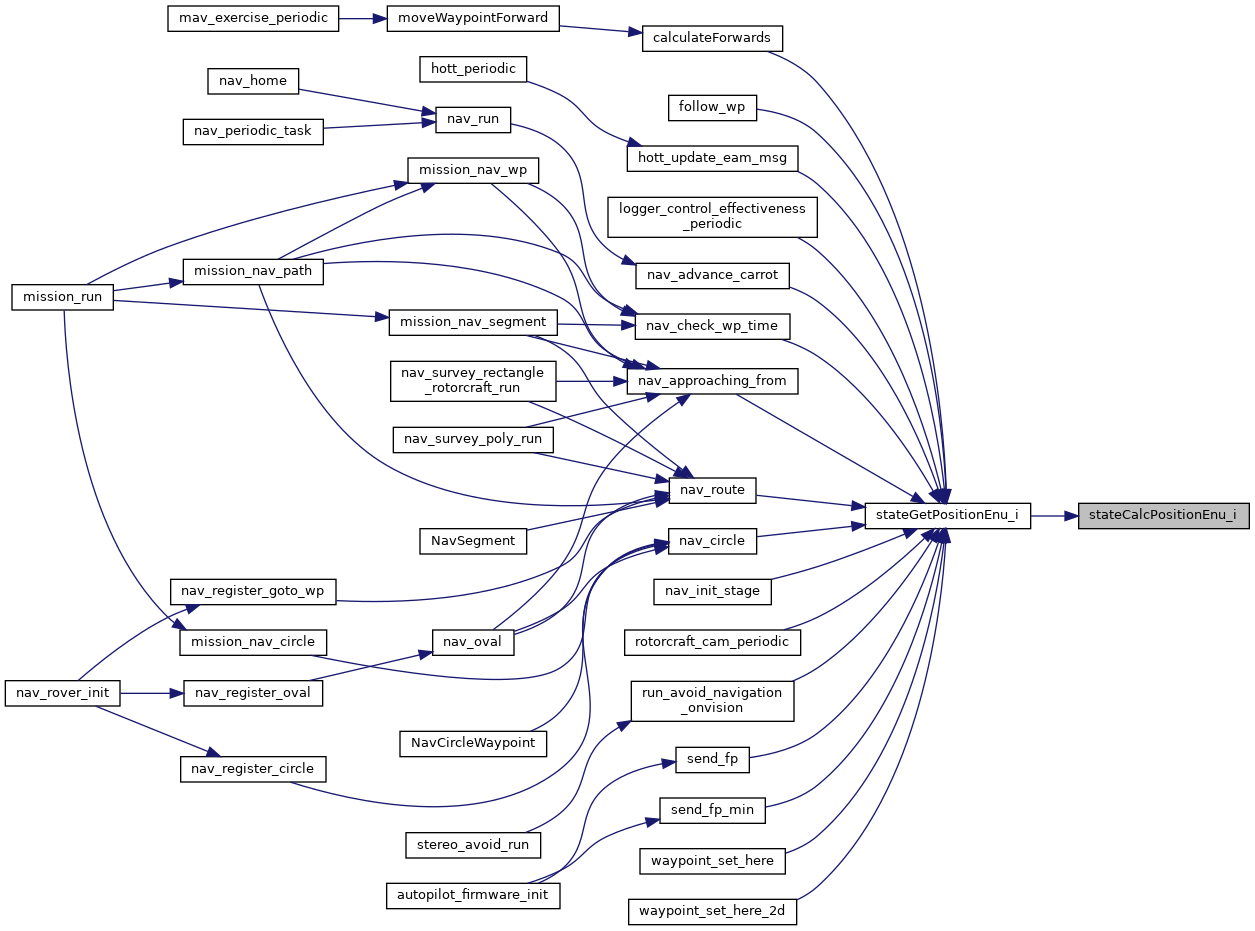
Here is the call graph for this function: Here is the caller graph for this function:| void stateCalcPositionEcef_i | ( | void | ) |
Definition at line 68 of file state.c.
References ECEF_BFP_OF_REAL, ecef_of_lla_f(), ecef_of_lla_i(), ecef_of_ned_point_f(), ecef_of_ned_pos_i(), State::ecef_pos_f, State::ecef_pos_i, State::lla_pos_f, State::lla_pos_i, State::ned_initialized_f, State::ned_initialized_i, State::ned_origin_f, State::ned_origin_i, State::ned_pos_f, State::ned_pos_i, POS_ECEF_F, POS_ECEF_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, and state.
Referenced by stateGetPositionEcef_i().
Here is the call graph for this function: Here is the caller graph for this function:| void stateCalcPositionEnu_f | ( | void | ) |
Definition at line 500 of file state.c.
References ecef_of_lla_i(), State::ecef_pos_f, State::ecef_pos_i, ENU_FLOAT_OF_BFP, enu_of_ecef_point_f(), enu_of_ecef_pos_i(), enu_of_lla_point_f(), ENU_OF_UTM_DIFF, State::enu_pos_f, State::enu_pos_i, LLA_FLOAT_OF_BFP, State::lla_pos_f, State::lla_pos_i, NED_FLOAT_OF_BFP, State::ned_initialized_f, State::ned_origin_f, State::ned_origin_i, State::ned_pos_f, State::ned_pos_i, POS_ECEF_F, POS_ECEF_I, POS_ENU_F, POS_ENU_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, POS_UTM_F, state, State::utm_initialized_f, utm_of_lla_f(), State::utm_origin_f, State::utm_pos_f, and VECT3_ENU_OF_NED.
Referenced by stateGetPositionEnu_f().
Here is the call graph for this function: Here is the caller graph for this function:| void stateCalcPositionEnu_i | ( | void | ) |
Definition at line 180 of file state.c.
References ecef_of_lla_f(), State::ecef_pos_f, State::ecef_pos_i, ENU_BFP_OF_REAL, enu_of_ecef_point_f(), enu_of_ecef_pos_i(), enu_of_lla_pos_i(), ENU_OF_UTM_DIFF, State::enu_pos_f, State::enu_pos_i, INT32_VECT3_ENU_OF_NED, LLA_FLOAT_OF_BFP, State::lla_pos_f, State::lla_pos_i, NED_BFP_OF_REAL, State::ned_initialized_i, State::ned_origin_f, State::ned_origin_i, State::ned_pos_f, State::ned_pos_i, POS_ECEF_F, POS_ECEF_I, POS_ENU_F, POS_ENU_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, POS_UTM_F, state, State::utm_initialized_f, utm_of_lla_f(), State::utm_origin_f, and State::utm_pos_f.
Referenced by stateGetPositionEnu_i().
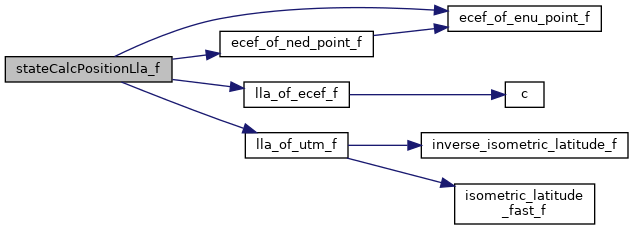
Here is the call graph for this function: Here is the caller graph for this function:| void stateCalcPositionLla_f | ( | void | ) |
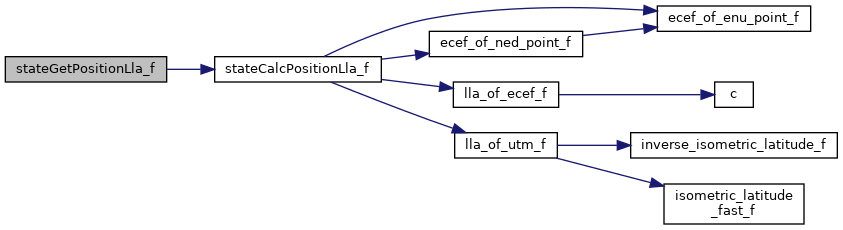
Definition at line 573 of file state.c.
References ECEF_FLOAT_OF_BFP, ecef_of_enu_point_f(), ecef_of_ned_point_f(), State::ecef_pos_f, State::ecef_pos_i, ENU_FLOAT_OF_BFP, State::enu_pos_f, State::enu_pos_i, LLA_FLOAT_OF_BFP, lla_of_ecef_f(), lla_of_utm_f(), State::lla_pos_f, NED_FLOAT_OF_BFP, State::ned_initialized_f, State::ned_origin_f, State::ned_pos_f, State::ned_pos_i, POS_ECEF_F, POS_ECEF_I, POS_ENU_F, POS_ENU_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, POS_UTM_F, state, State::utm_initialized_f, UTM_OF_ENU_ADD, UTM_OF_NED_ADD, State::utm_origin_f, and State::utm_pos_f.
Referenced by stateGetPositionLla_f().
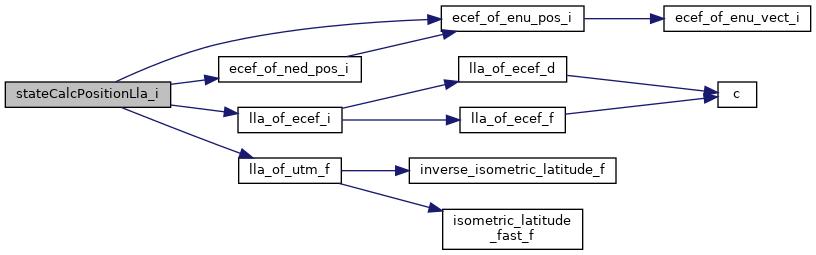
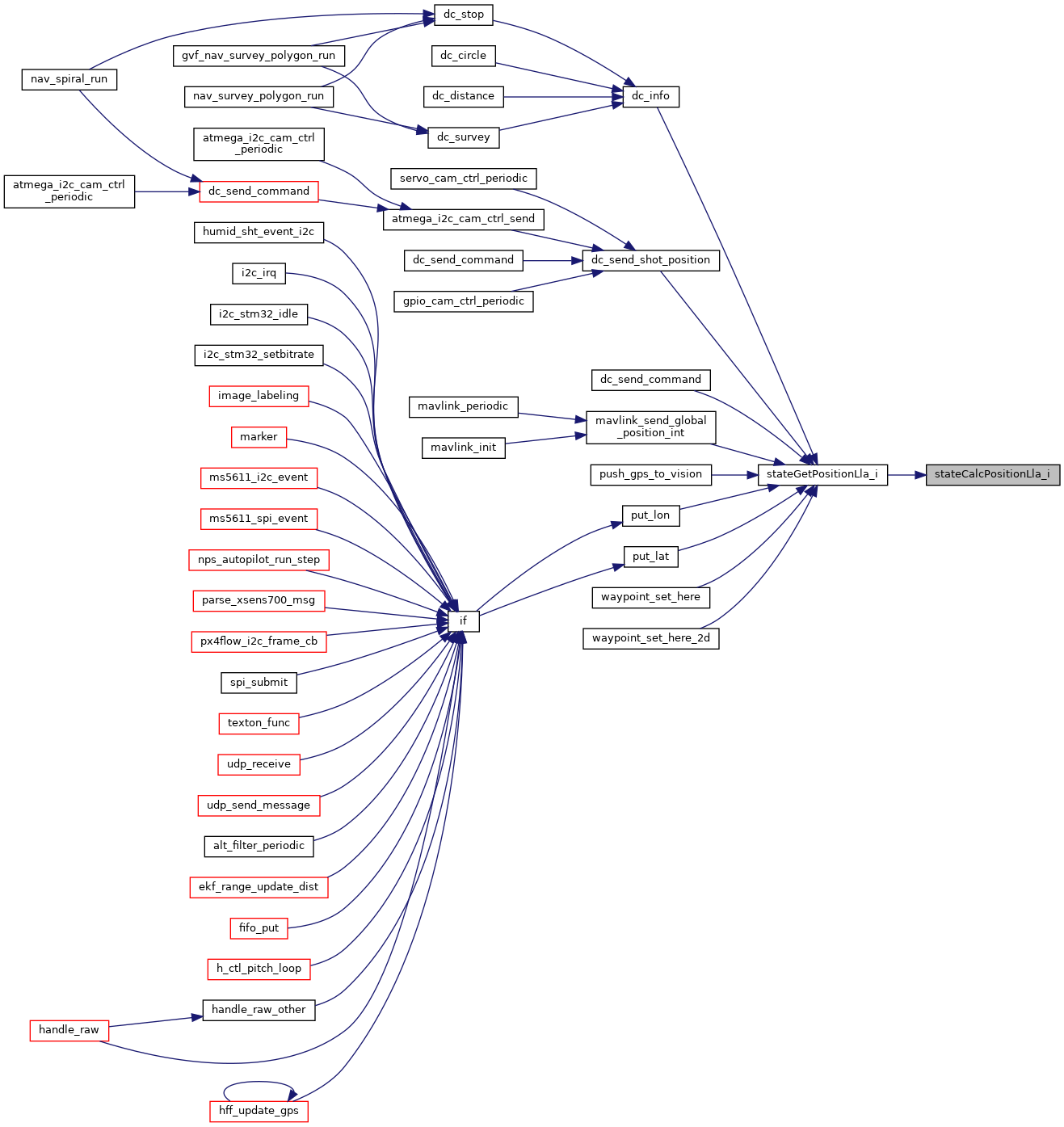
Here is the call graph for this function: Here is the caller graph for this function:| void stateCalcPositionLla_i | ( | void | ) |
Calculate LLA (int) from any other available representation.
Note that since LLA in float has bad precision this is the last choice. So we mostly first convert to ECEF and then use lla_of_ecef_i which provides higher precision but is currently using the double function internally. When using UTM coordinates, NED/ENU are abused as "local" UTM.
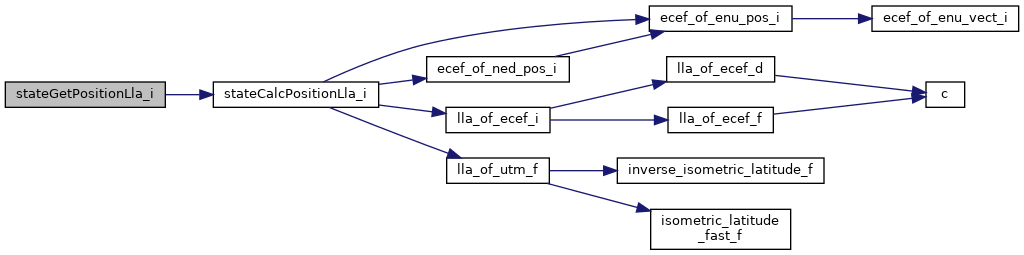
Definition at line 267 of file state.c.
References ECEF_BFP_OF_REAL, ecef_of_enu_pos_i(), ecef_of_ned_pos_i(), State::ecef_pos_f, State::ecef_pos_i, ENU_BFP_OF_REAL, ENU_FLOAT_OF_BFP, State::enu_pos_f, State::enu_pos_i, LLA_BFP_OF_REAL, lla_of_ecef_i(), lla_of_utm_f(), State::lla_pos_f, State::lla_pos_i, NED_BFP_OF_REAL, NED_FLOAT_OF_BFP, State::ned_initialized_i, State::ned_origin_i, State::ned_pos_f, State::ned_pos_i, POS_ECEF_F, POS_ECEF_I, POS_ENU_F, POS_ENU_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, POS_UTM_F, state, State::utm_initialized_f, UTM_OF_ENU_ADD, UTM_OF_NED_ADD, State::utm_origin_f, and State::utm_pos_f.
Referenced by stateGetPositionLla_i().
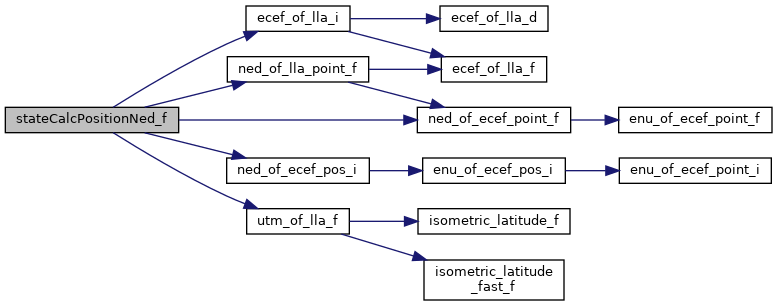
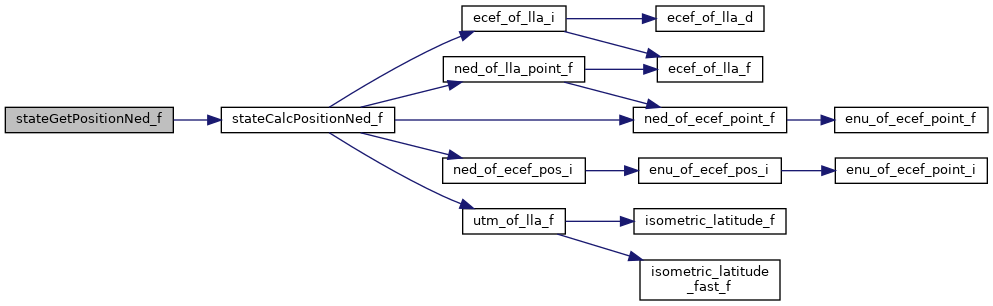
Here is the call graph for this function: Here is the caller graph for this function:| void stateCalcPositionNed_f | ( | void | ) |
Definition at line 433 of file state.c.
References ecef_of_lla_i(), State::ecef_pos_f, State::ecef_pos_i, ENU_FLOAT_OF_BFP, State::enu_pos_f, State::enu_pos_i, LLA_FLOAT_OF_BFP, State::lla_pos_f, State::lla_pos_i, NED_FLOAT_OF_BFP, State::ned_initialized_f, ned_of_ecef_point_f(), ned_of_ecef_pos_i(), ned_of_lla_point_f(), NED_OF_UTM_DIFF, State::ned_origin_f, State::ned_origin_i, State::ned_pos_f, State::ned_pos_i, POS_ECEF_F, POS_ECEF_I, POS_ENU_F, POS_ENU_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, POS_UTM_F, state, State::utm_initialized_f, utm_of_lla_f(), State::utm_origin_f, State::utm_pos_f, and VECT3_NED_OF_ENU.
Referenced by stateGetPositionNed_f().
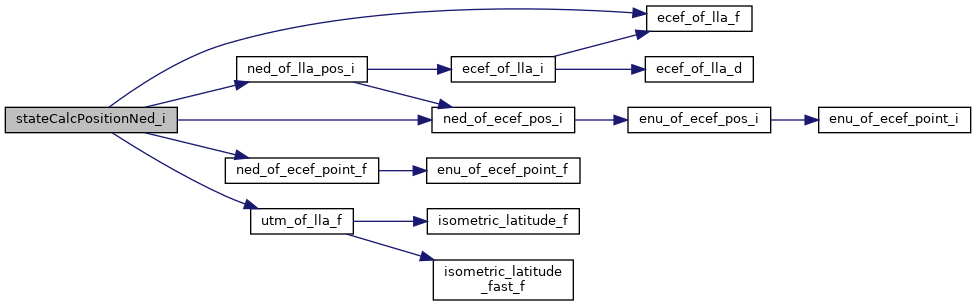
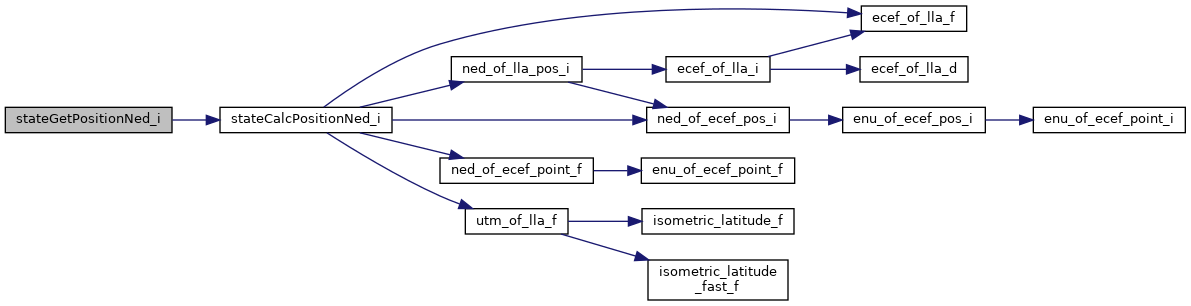
Here is the call graph for this function: Here is the caller graph for this function:| void stateCalcPositionNed_i | ( | void | ) |
Definition at line 100 of file state.c.
References ecef_of_lla_f(), State::ecef_pos_f, State::ecef_pos_i, ENU_BFP_OF_REAL, State::enu_pos_f, State::enu_pos_i, INT32_VECT3_NED_OF_ENU, LLA_FLOAT_OF_BFP, State::lla_pos_f, State::lla_pos_i, NED_BFP_OF_REAL, State::ned_initialized_i, ned_of_ecef_point_f(), ned_of_ecef_pos_i(), ned_of_lla_pos_i(), NED_OF_UTM_DIFF, State::ned_origin_f, State::ned_origin_i, State::ned_pos_f, State::ned_pos_i, POS_ECEF_F, POS_ECEF_I, POS_ENU_F, POS_ENU_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, POS_UTM_F, state, State::utm_initialized_f, utm_of_lla_f(), State::utm_origin_f, and State::utm_pos_f.
Referenced by stateGetPositionNed_i().
Here is the call graph for this function: Here is the caller graph for this function:| void stateCalcPositionUtm_f | ( | void | ) |
Definition at line 365 of file state.c.
References ENU_FLOAT_OF_BFP, State::enu_pos_f, State::enu_pos_i, LLA_FLOAT_OF_BFP, State::lla_pos_f, State::lla_pos_i, NED_FLOAT_OF_BFP, State::ned_pos_f, State::ned_pos_i, POS_ENU_F, POS_ENU_I, POS_LLA_F, POS_LLA_I, POS_NED_F, POS_NED_I, State::pos_status, POS_UTM_F, state, State::utm_initialized_f, UTM_OF_ENU_ADD, utm_of_lla_f(), UTM_OF_NED_ADD, State::utm_origin_f, and State::utm_pos_f.
Referenced by stateGetPositionUtm_f().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get position in ECEF coordinates (float).
Definition at line 701 of file state.h.
References State::ecef_pos_f, POS_ECEF_F, State::pos_status, state, and stateCalcPositionEcef_f().
Here is the call graph for this function:
|
inlinestatic |
Get position in ECEF coordinates (int).
Definition at line 656 of file state.h.
References State::ecef_pos_i, POS_ECEF_I, State::pos_status, state, and stateCalcPositionEcef_i().
Referenced by ins_vectornav_propagate().
Here is the call graph for this function: Here is the caller graph for this function:
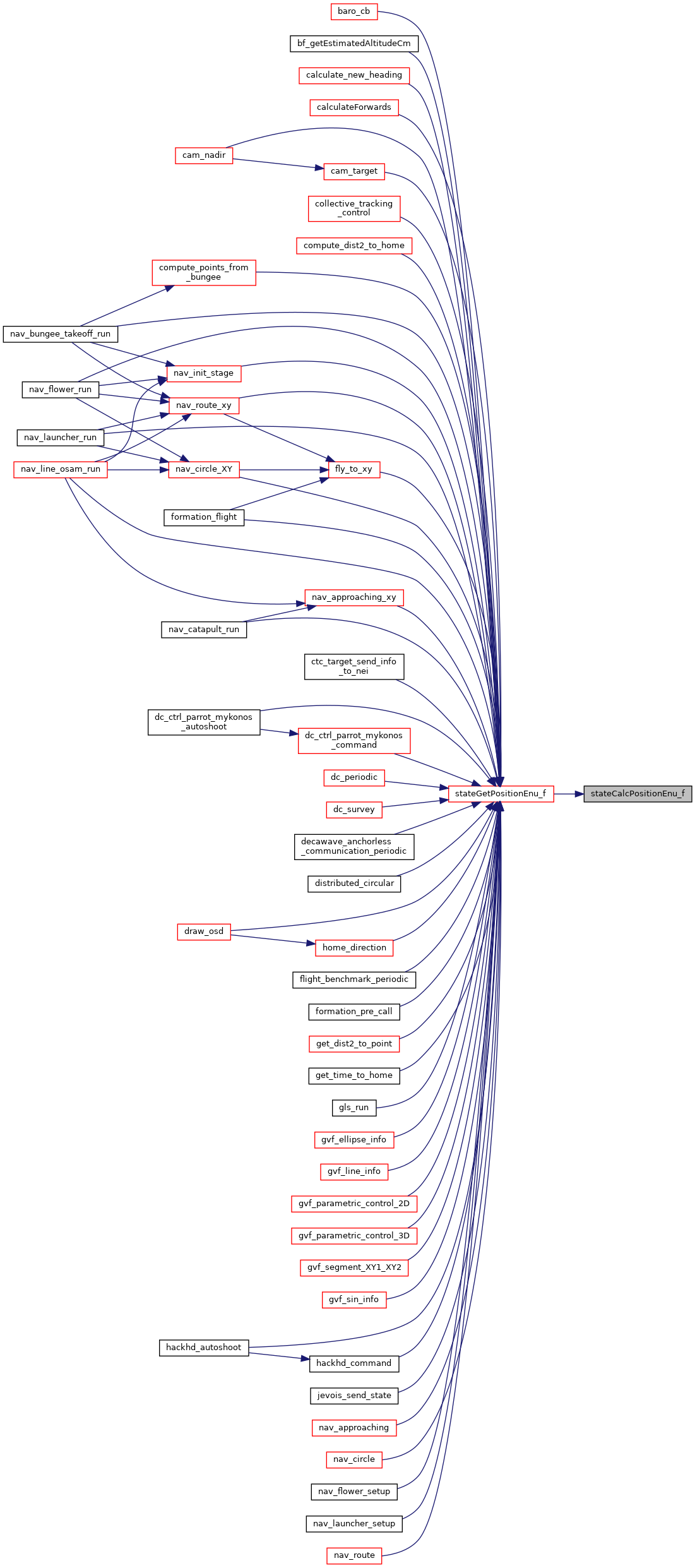
|
inlinestatic |
Get position in local ENU coordinates (float).
Definition at line 719 of file state.h.
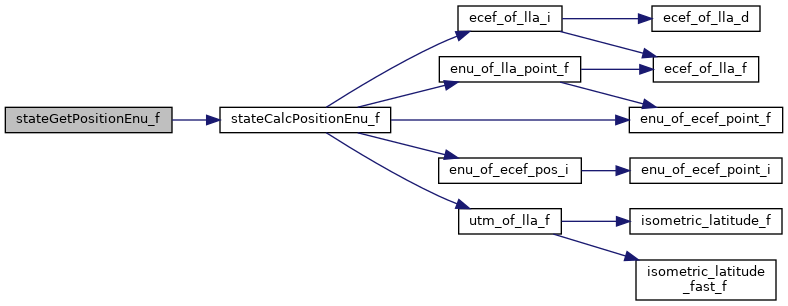
References State::enu_pos_f, POS_ENU_F, State::pos_status, state, and stateCalcPositionEnu_f().
Referenced by baro_cb(), bf_getEstimatedAltitudeCm(), calculate_new_heading(), calculateForwards(), cam_nadir(), cam_target(), collective_tracking_control(), compute_dist2_to_home(), compute_points_from_bungee(), ctc_target_send_info_to_nei(), dc_ctrl_parrot_mykonos_autoshoot(), dc_ctrl_parrot_mykonos_command(), dc_periodic(), dc_survey(), decawave_anchorless_communication_periodic(), distributed_circular(), draw_osd(), flight_benchmark_periodic(), fly_to_xy(), formation_flight(), formation_pre_call(), get_dist2_to_point(), get_time_to_home(), gls_run(), gvf_ellipse_info(), gvf_line_info(), gvf_parametric_control_2D(), gvf_parametric_control_3D(), gvf_segment_XY1_XY2(), gvf_sin_info(), hackhd_autoshoot(), hackhd_command(), home_direction(), jevois_send_state(), nav_approaching(), nav_approaching_xy(), nav_bungee_takeoff_run(), nav_catapult_run(), nav_circle(), nav_circle_XY(), nav_flower_run(), nav_flower_setup(), nav_init_stage(), nav_launcher_run(), nav_launcher_setup(), nav_line_osam_run(), nav_route(), nav_route_xy(), nav_set_heading_towards(), nav_skid_landing_glide(), nav_spiral_run(), nav_spiral_setup(), nav_survey_disc_run(), nav_survey_disc_setup(), nav_survey_losange_carto(), nav_survey_poly_osam_run(), nav_survey_poly_run(), nav_survey_rectangle(), nav_survey_rectangle_init(), nav_survey_rectangle_rotorcraft_run(), nav_survey_rectangle_rotorcraft_setup(), out_of_segment_area(), potential_task(), process_data(), range_msg_callback(), reset_all_vars(), rover_guidance_run(), snav_init(), snav_on_time(), sonar_adc_read(), sonar_bebop_read(), sonar_pwm_read(), sonar_vl53l1x_read(), stereo_avoid_run(), tcas_periodic_task_1Hz(), tcas_test_direction(), tfmini_i2c_periodic(), and vertical_ctrl_module_run().
Here is the call graph for this function:
|
inlinestatic |
Get position in local ENU coordinates (int).
Definition at line 674 of file state.h.
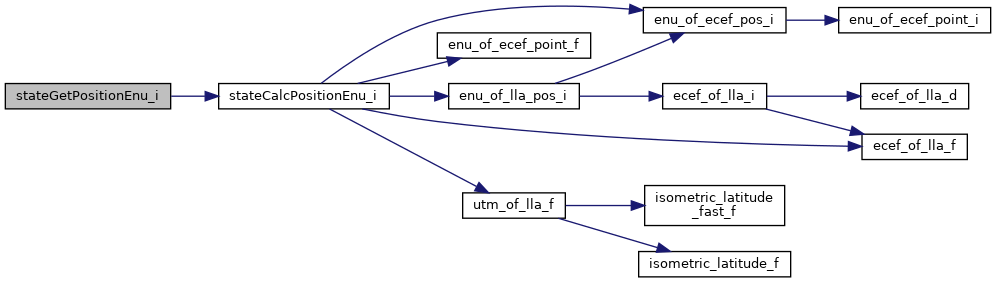
References State::enu_pos_i, POS_ENU_I, State::pos_status, state, and stateCalcPositionEnu_i().
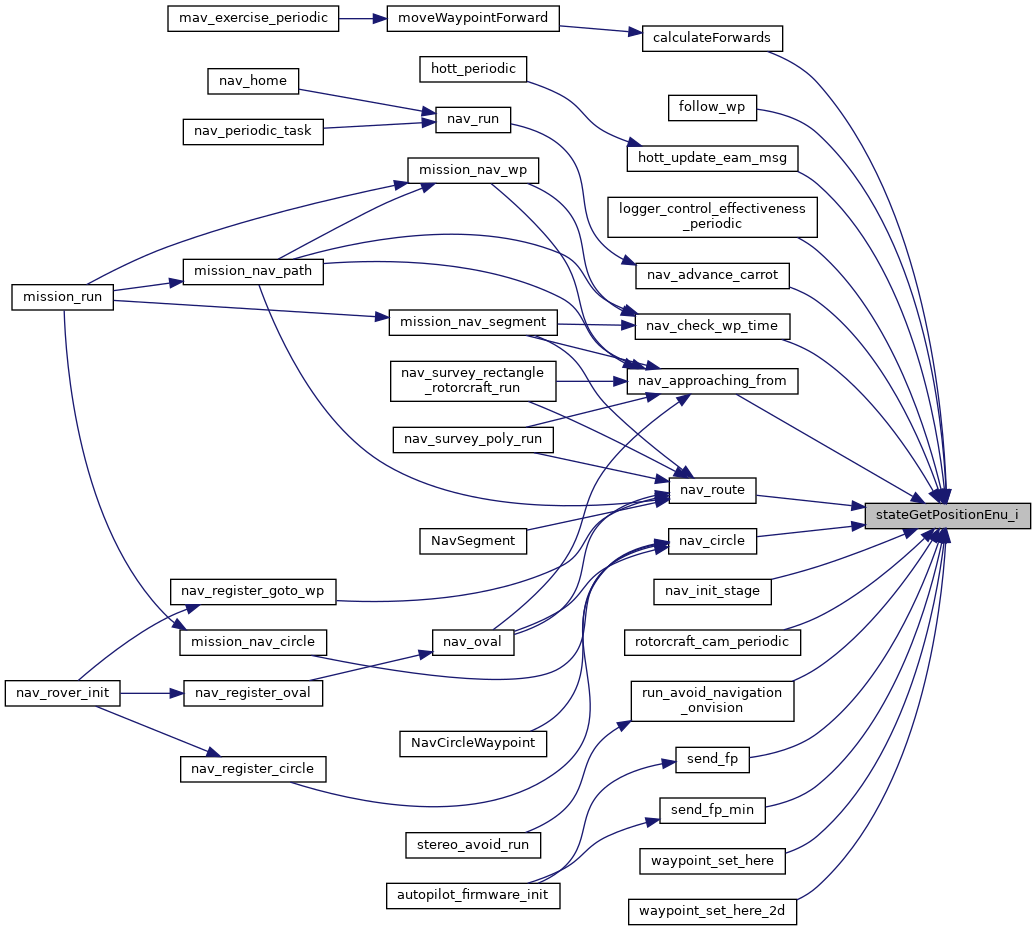
Referenced by calculateForwards(), follow_wp(), hott_update_eam_msg(), logger_control_effectiveness_periodic(), nav_advance_carrot(), nav_approaching_from(), nav_check_wp_time(), nav_circle(), nav_init_stage(), nav_route(), rotorcraft_cam_periodic(), run_avoid_navigation_onvision(), send_fp(), send_fp_min(), waypoint_set_here(), and waypoint_set_here_2d().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get position in LLA coordinates (float).
Definition at line 728 of file state.h.
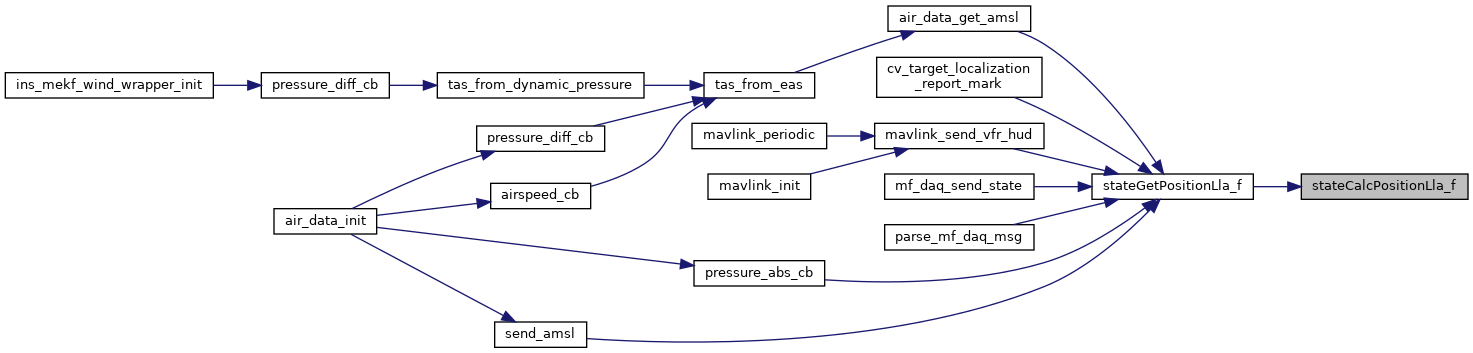
References State::lla_pos_f, POS_LLA_F, State::pos_status, state, and stateCalcPositionLla_f().
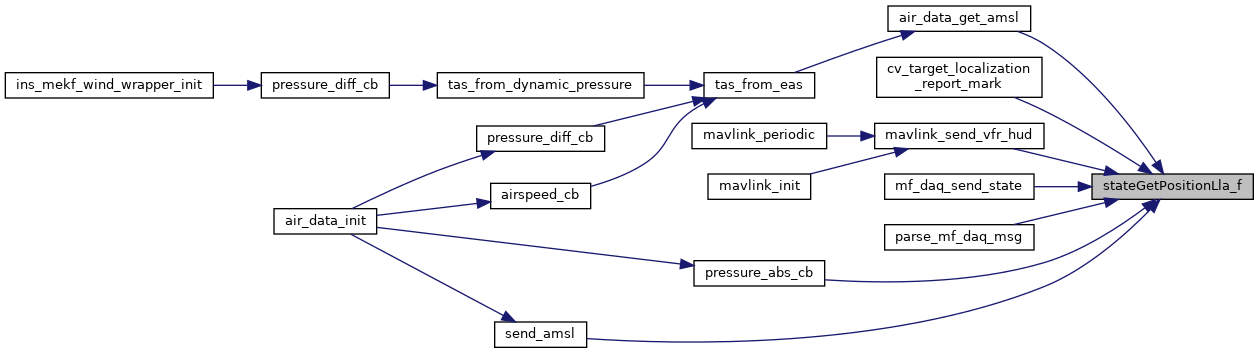
Referenced by air_data_get_amsl(), cv_target_localization_report_mark(), mavlink_send_vfr_hud(), mf_daq_send_state(), parse_mf_daq_msg(), pressure_abs_cb(), and send_amsl().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get position in LLA coordinates (int).
Definition at line 683 of file state.h.
References State::lla_pos_i, POS_LLA_I, State::pos_status, state, and stateCalcPositionLla_i().
Referenced by dc_info(), dc_send_command(), dc_send_shot_position(), mavlink_send_global_position_int(), push_gps_to_vision(), put_lat(), put_lon(), waypoint_set_here(), and waypoint_set_here_2d().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
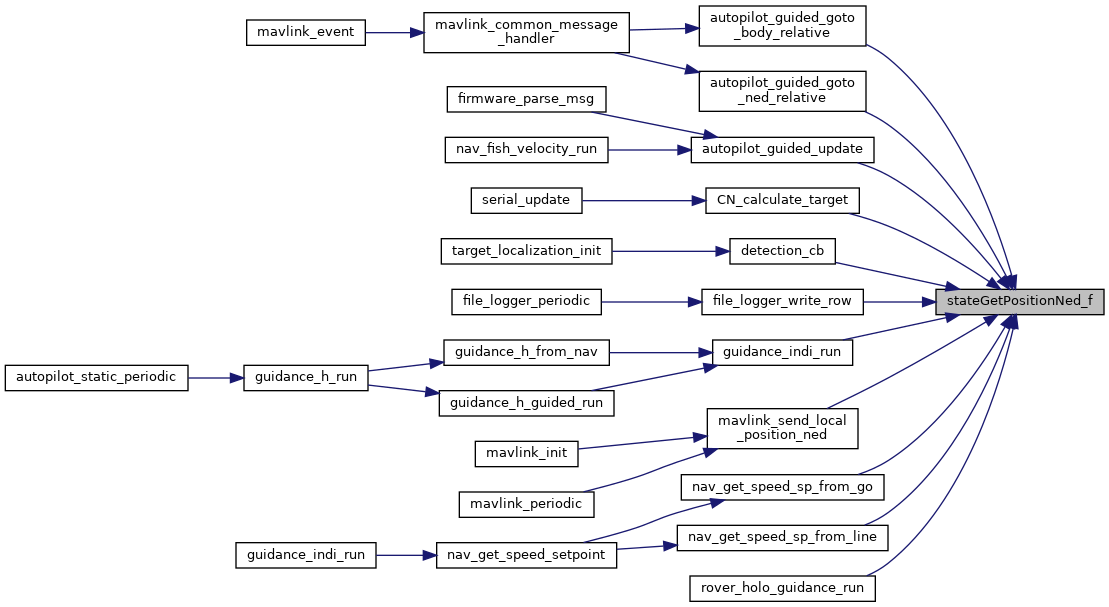
Get position in local NED coordinates (float).
Definition at line 710 of file state.h.
References State::ned_pos_f, POS_NED_F, State::pos_status, state, and stateCalcPositionNed_f().
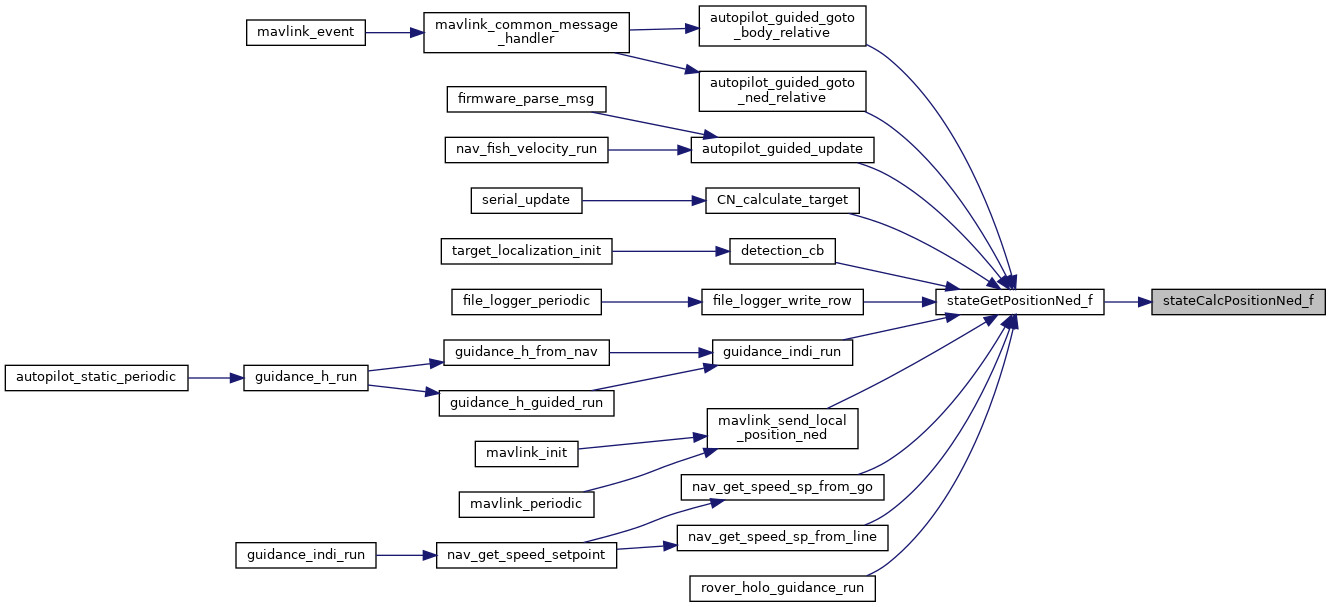
Referenced by autopilot_guided_goto_body_relative(), autopilot_guided_goto_ned_relative(), autopilot_guided_update(), CN_calculate_target(), detection_cb(), file_logger_write_row(), guidance_indi_run(), mavlink_send_local_position_ned(), nav_get_speed_sp_from_go(), nav_get_speed_sp_from_line(), and rover_holo_guidance_run().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get position in local NED coordinates (int).
Definition at line 665 of file state.h.
References State::ned_pos_i, POS_NED_I, State::pos_status, state, and stateCalcPositionNed_i().
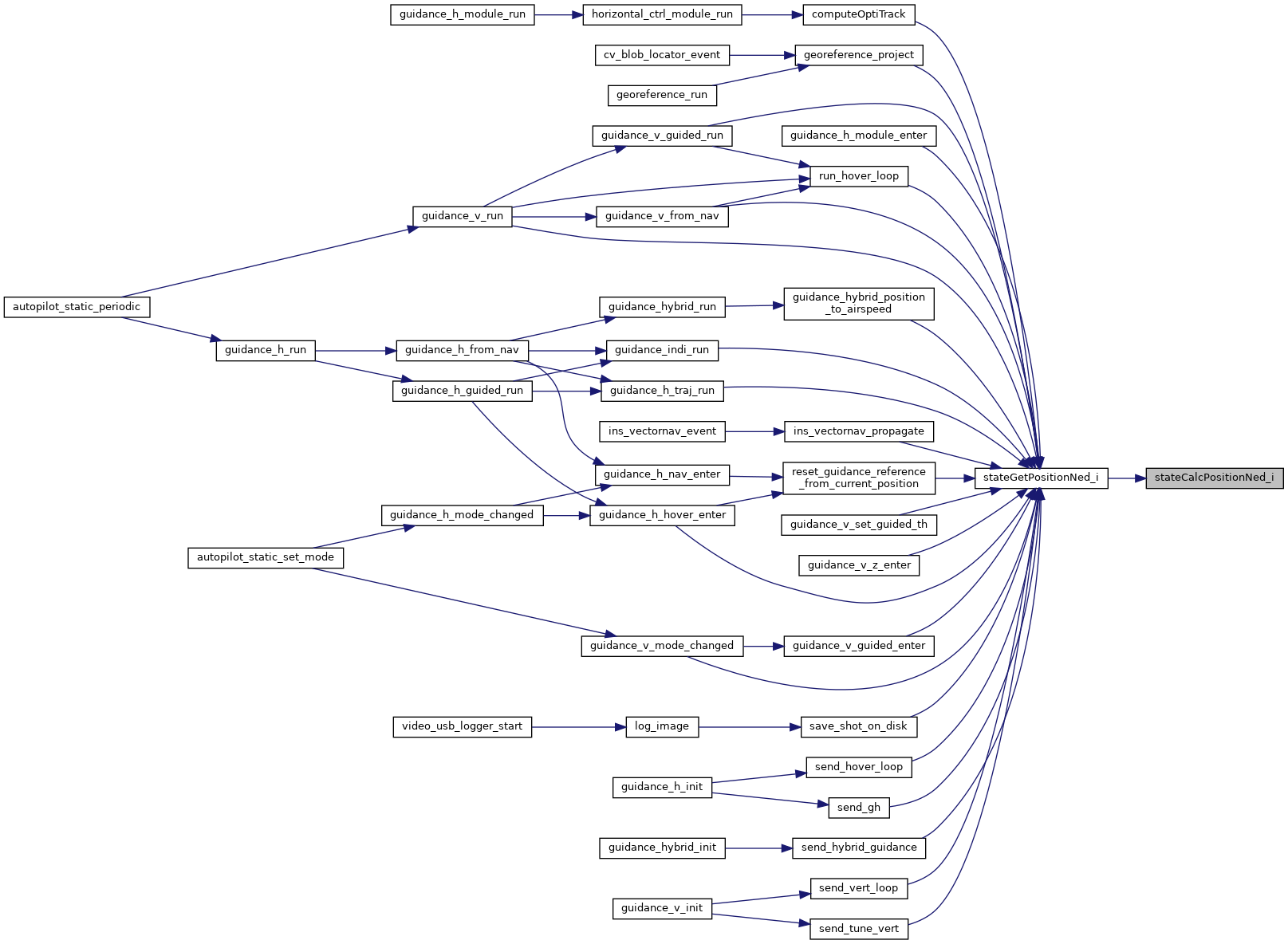
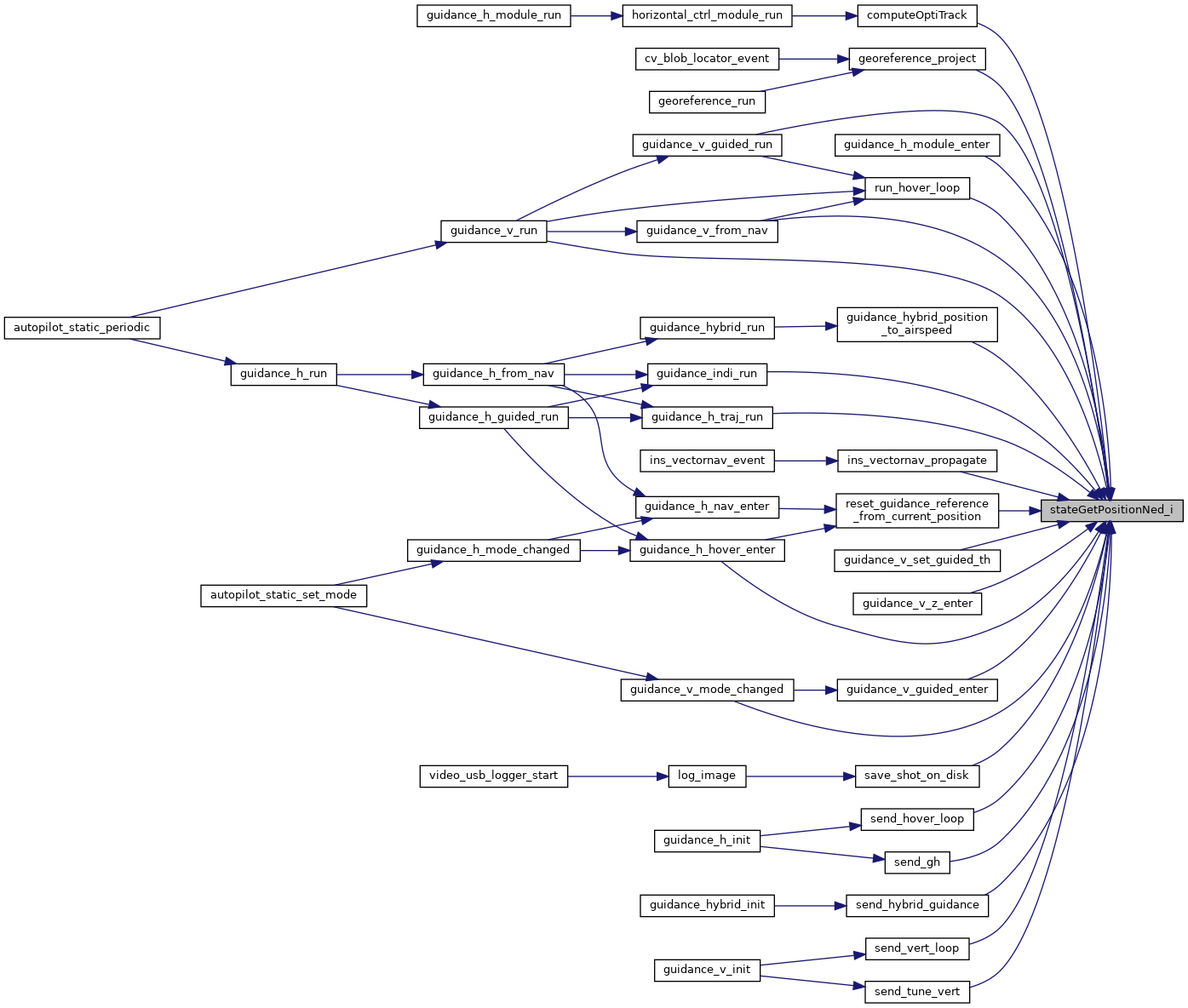
Referenced by computeOptiTrack(), georeference_project(), guidance_h_hover_enter(), guidance_h_module_enter(), guidance_h_traj_run(), guidance_hybrid_position_to_airspeed(), guidance_indi_run(), guidance_v_from_nav(), guidance_v_guided_enter(), guidance_v_guided_run(), guidance_v_mode_changed(), guidance_v_run(), guidance_v_set_guided_th(), guidance_v_z_enter(), ins_vectornav_propagate(), reset_guidance_reference_from_current_position(), run_hover_loop(), save_shot_on_disk(), send_gh(), send_hover_loop(), send_hybrid_guidance(), send_tune_vert(), and send_vert_loop().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Get position in UTM coordinates (float).
Definition at line 692 of file state.h.
References State::pos_status, POS_UTM_F, state, stateCalcPositionUtm_f(), and State::utm_pos_f.
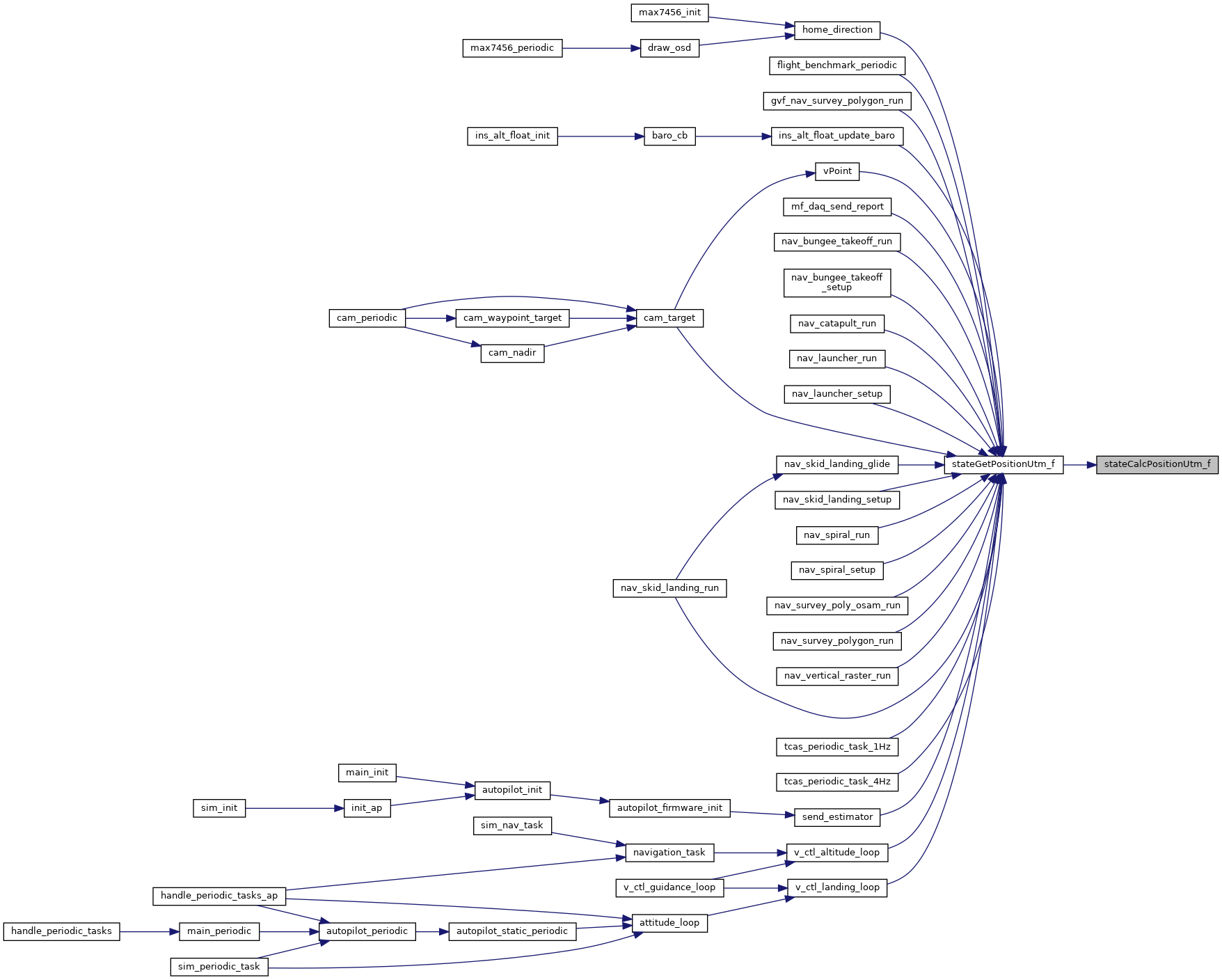
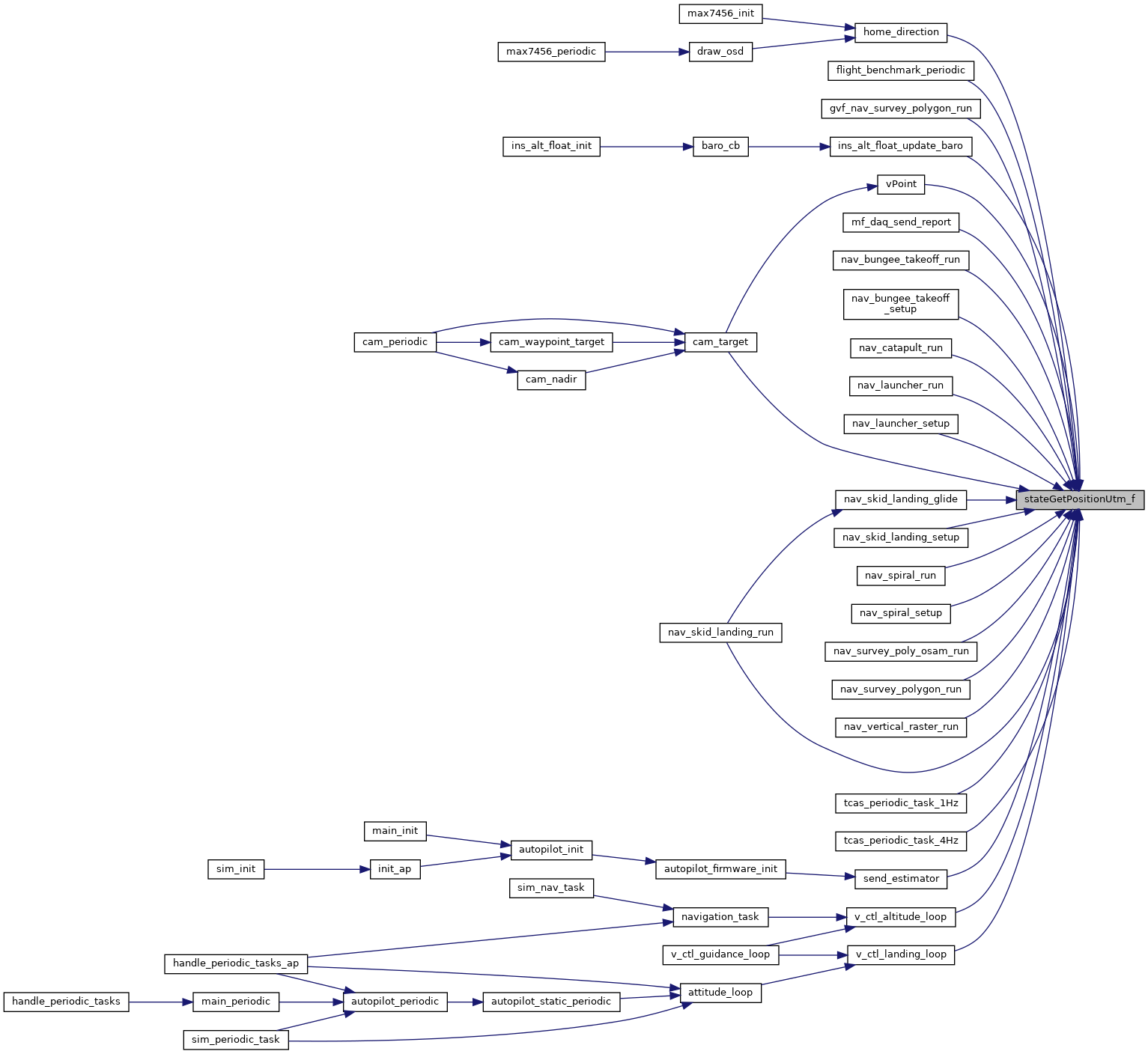
Referenced by cam_target(), flight_benchmark_periodic(), gvf_nav_survey_polygon_run(), home_direction(), ins_alt_float_update_baro(), mf_daq_send_report(), nav_bungee_takeoff_run(), nav_bungee_takeoff_setup(), nav_catapult_run(), nav_launcher_run(), nav_launcher_setup(), nav_skid_landing_glide(), nav_skid_landing_run(), nav_skid_landing_setup(), nav_spiral_run(), nav_spiral_setup(), nav_survey_poly_osam_run(), nav_survey_polygon_run(), nav_vertical_raster_run(), send_estimator(), tcas_periodic_task_1Hz(), tcas_periodic_task_4Hz(), v_ctl_altitude_loop(), v_ctl_landing_loop(), and vPoint().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Test if global coordinates are valid.
Definition at line 515 of file state.h.
References POS_GLOBAL_COORD, State::pos_status, state, and stateIsLocalCoordinateValid().
Referenced by pressure_abs_cb().
Here is the call graph for this function: Here is the caller graph for this function:
|
inlinestatic |
Test if local coordinates are valid.
Definition at line 508 of file state.h.
References State::ned_initialized_f, State::ned_initialized_i, POS_LOCAL_COORD, State::pos_status, state, and State::utm_initialized_f.
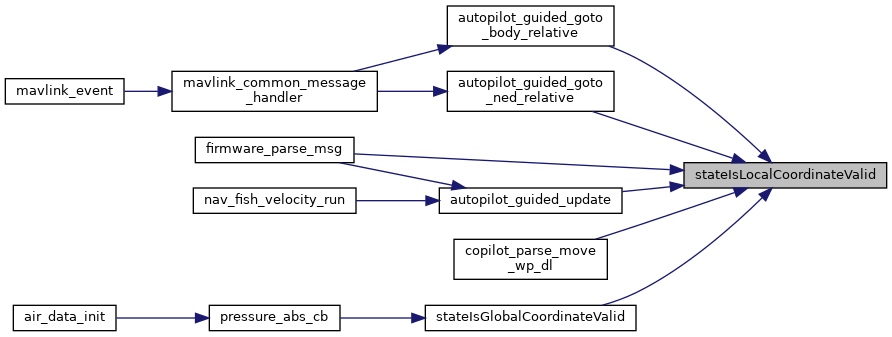
Referenced by autopilot_guided_goto_body_relative(), autopilot_guided_goto_ned_relative(), autopilot_guided_update(), copilot_parse_move_wp_dl(), firmware_parse_msg(), and stateIsGlobalCoordinateValid().
Here is the caller graph for this function:
|
inlinestatic |
Set the local (flat earth) coordinate frame origin (int).
Definition at line 457 of file state.h.
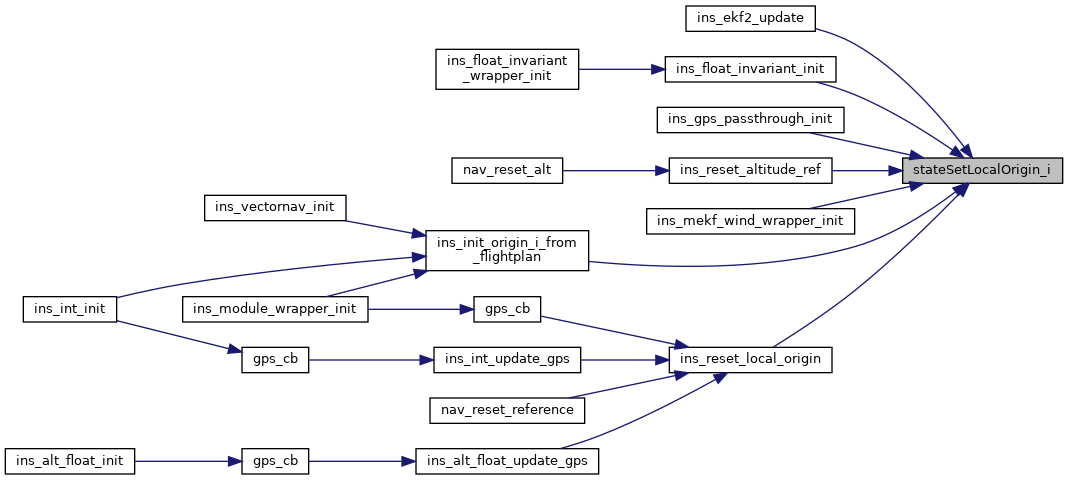
Referenced by ins_ekf2_update(), ins_float_invariant_init(), ins_gps_passthrough_init(), ins_init_origin_i_from_flightplan(), ins_mekf_wind_wrapper_init(), ins_reset_altitude_ref(), and ins_reset_local_origin().
Here is the caller graph for this function:
|
inlinestatic |
Set the local (flat earth) coordinate frame origin from UTM (float).
Definition at line 477 of file state.h.
References ACCEL_NED_F, ACCEL_NED_I, State::accel_status, POS_LOCAL_COORD, State::pos_status, SPEED_LOCAL_COORD, State::speed_status, state, State::utm_initialized_f, and State::utm_origin_f.
Referenced by ins_alt_float_init(), ins_float_invariant_init(), ins_gps_passthrough_init(), ins_mekf_wind_wrapper_init(), ins_reset_altitude_ref(), ins_reset_local_origin(), ins_reset_utm_zone(), ins_xsens700_init(), and ins_xsens_init().
Here is the caller graph for this function:
|
inlinestatic |
Set multiple position coordinates (float).
Definition at line 622 of file state.h.
References State::ecef_pos_f, State::enu_pos_f, LLA_COPY, State::lla_pos_f, State::ned_pos_f, POS_ECEF_F, POS_ENU_F, POS_LLA_F, POS_NED_F, State::pos_status, POS_UTM_F, state, State::utm_pos_f, and VECT3_COPY.
|
inlinestatic |
Set multiple position coordinates (int).
Definition at line 555 of file state.h.
References State::ecef_pos_i, State::enu_pos_i, LLA_COPY, State::lla_pos_i, State::ned_pos_i, POS_ECEF_I, POS_ENU_I, POS_LLA_I, POS_NED_I, State::pos_status, state, and VECT3_COPY.
|
inlinestatic |
Set position from ECEF coordinates (float).
Definition at line 590 of file state.h.
References State::ecef_pos_f, POS_ECEF_F, State::pos_status, state, and VECT3_COPY.
|
inlinestatic |
Set position from ECEF coordinates (int).
Definition at line 523 of file state.h.
References State::ecef_pos_i, POS_ECEF_I, State::pos_status, state, and VECT3_COPY.
|
inlinestatic |
Set position from local ENU coordinates (float).
Definition at line 606 of file state.h.
References State::enu_pos_f, POS_ENU_F, State::pos_status, state, and VECT3_COPY.
|
inlinestatic |
Set position from local ENU coordinates (int).
Definition at line 539 of file state.h.
References State::enu_pos_i, POS_ENU_I, State::pos_status, state, and VECT3_COPY.
|
inlinestatic |
Set position from LLA coordinates (float).
Definition at line 614 of file state.h.
References LLA_COPY, State::lla_pos_f, POS_LLA_F, State::pos_status, and state.
|
inlinestatic |
Set position from LLA coordinates (int).
Definition at line 547 of file state.h.
References LLA_COPY, State::lla_pos_i, POS_LLA_I, State::pos_status, and state.
Referenced by ins_vectornav_propagate().
Here is the caller graph for this function:
|
inlinestatic |
Set position from local NED coordinates (float).
Definition at line 598 of file state.h.
References State::ned_pos_f, POS_NED_F, State::pos_status, state, and VECT3_COPY.
Referenced by ins_ekf2_update(), ins_float_invariant_propagate(), set_state_from_ins(), and sim_overwrite_ins().
Here is the caller graph for this function:
|
inlinestatic |
Set position from local NED coordinates (int).
Definition at line 531 of file state.h.
References State::ned_pos_i, POS_NED_I, State::pos_status, state, and VECT3_COPY.
Referenced by gps_cb(), and ins_ned_to_state().
Here is the caller graph for this function:
|
inlinestatic |
Set position from UTM coordinates (float).
Definition at line 582 of file state.h.
References State::pos_status, POS_UTM_F, state, and State::utm_pos_f.
Referenced by gps_cb(), ins_alt_float_init(), ins_alt_float_update_baro(), ins_alt_float_update_gps(), ins_float_invariant_init(), ins_gps_passthrough_init(), ins_mekf_wind_wrapper_init(), ins_xsens700_init(), ins_xsens_init(), and sim_overwrite_ins().
Here is the caller graph for this function:| float State::alt_agl_f |
Altitude above ground level.
Unit: meters
Definition at line 198 of file state.h.
Referenced by dc_send_command().
| struct EcefCoor_f State::ecef_pos_f |
Position in EarthCenteredEarthFixed coordinates.
Units: meters
Definition at line 211 of file state.h.
Referenced by stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateGetPositionEcef_f(), stateSetPosition_f(), and stateSetPositionEcef_f().
| struct EcefCoor_i State::ecef_pos_i |
Position in EarthCenteredEarthFixed coordinates.
Units: centimeters
Definition at line 150 of file state.h.
Referenced by stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateGetPositionEcef_i(), stateSetPosition_i(), and stateSetPositionEcef_i().
| struct EnuCoor_f State::enu_pos_f |
Position in East North Up coordinates.
with respect to ned_origin_i (flat earth) Units: meters
Definition at line 250 of file state.h.
Referenced by stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateGetPositionEnu_f(), stateSetPosition_f(), and stateSetPositionEnu_f().
| struct EnuCoor_i State::enu_pos_i |
Position in East North Up coordinates.
with respect to ned_origin_i (flat earth) Units: m in BFP with INT32_POS_FRAC
Definition at line 185 of file state.h.
Referenced by stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateGetPositionEnu_i(), stateSetPosition_i(), and stateSetPositionEnu_i().
| struct LlaCoor_f State::lla_pos_f |
Position in Latitude, Longitude and Altitude.
Units lat,lon: radians Units alt: meters above reference ellipsoid
Definition at line 205 of file state.h.
Referenced by stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateGetPositionLla_f(), stateSetPosition_f(), and stateSetPositionLla_f().
| struct LlaCoor_i State::lla_pos_i |
Position in Latitude, Longitude and Altitude.
Units lat,lon: degrees*1e7 Units alt: milimeters above reference ellipsoid
Definition at line 157 of file state.h.
Referenced by stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateGetPositionLla_i(), stateSetPosition_i(), and stateSetPositionLla_i().
| bool State::ned_initialized_f |
True if local float coordinate frame is initialsed.
Definition at line 223 of file state.h.
Referenced by error_output(), gps_cb(), ins_float_invariant_update_gps(), pressure_abs_cb(), sim_overwrite_ins(), stateCalcAccelEcef_f(), stateCalcAccelNed_f(), stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionLla_f(), stateCalcPositionNed_f(), stateCalcSpeedEnu_f(), stateCalcSpeedNed_f(), stateInit(), and stateIsLocalCoordinateValid().
| bool State::ned_initialized_i |
true if local int coordinate frame is initialsed
Definition at line 171 of file state.h.
Referenced by acInfoCalcPositionEnu_f(), acInfoCalcPositionEnu_i(), gps_sim_hitl_event(), mavlink_send_gps_global_origin(), mission_point_of_lla(), send_ins_ref(), sim_overwrite_ins(), stateCalcAccelEcef_i(), stateCalcAccelNed_i(), stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_i(), stateCalcPositionLla_i(), stateCalcPositionNed_i(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_i(), stateInit(), stateIsLocalCoordinateValid(), waypoint_globalize(), and waypoint_localize().
| struct LtpDef_f State::ned_origin_f |
Definition of the local (flat earth) coordinate system.
Defines the origin of the local NorthEastDown coordinate system in ECEF (EarthCenteredEarthFixed) and LLA (LatitudeLongitudeAlt) coordinates and the roation matrix from ECEF to local frame. (float version)
Definition at line 220 of file state.h.
Referenced by acInfoCalcPositionEnu_f(), acInfoCalcPositionEnu_i(), detection_cb(), gps_cb(), ins_float_invariant_update_gps(), mavlink_send_global_position_int(), pressure_abs_cb(), stateCalcAccelEcef_f(), stateCalcAccelNed_f(), stateCalcHorizontalSpeedNorm_i(), stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcSpeedEcef_f(), stateCalcSpeedEnu_f(), and stateCalcSpeedNed_f().
| struct LtpDef_i State::ned_origin_i |
Definition of the local (flat earth) coordinate system.
Defines the origin of the local NorthEastDown coordinate system in ECEF (EarthCenteredEarthFixed) and LLA (LatitudeLongitudeAlt) coordinates and the roation matrix from ECEF to local frame. (int version)
Definition at line 166 of file state.h.
Referenced by acInfoCalcPositionEnu_f(), acInfoCalcPositionEnu_i(), copilot_parse_move_wp_dl(), firmware_parse_msg(), gps_cb(), gps_sim_hitl_event(), ins_float_invariant_update_gps(), ins_reset_altitude_ref(), mavlink_send_gps_global_origin(), mavlink_wp_message_handler(), mission_point_of_lla(), send_ins_ref(), stateCalcAccelEcef_i(), stateCalcAccelNed_i(), stateCalcHorizontalSpeedNorm_i(), stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcSpeedEcef_i(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_i(), waypoint_globalize(), waypoint_localize(), waypoint_move_here_2d(), and waypoint_move_lla().
| struct NedCoor_f State::ned_pos_f |
Position in North East Down coordinates.
with respect to ned_origin_i (flat earth) Units: meters
Definition at line 243 of file state.h.
Referenced by stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateGetPositionNed_f(), stateSetPosition_f(), and stateSetPositionNed_f().
| struct NedCoor_i State::ned_pos_i |
Position in North East Down coordinates.
with respect to ned_origin_i (flat earth) Units: m in BFP with INT32_POS_FRAC
Definition at line 178 of file state.h.
Referenced by stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateGetPositionNed_i(), stateSetPosition_i(), and stateSetPositionNed_i().
| uint16_t State::pos_status |
Holds the status bits for all position representations.
When the corresponding bit is set the representation is already computed.
Definition at line 144 of file state.h.
Referenced by stateCalcPositionEcef_f(), stateCalcPositionEcef_i(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateGetPositionEcef_f(), stateGetPositionEcef_i(), stateGetPositionEnu_f(), stateGetPositionEnu_i(), stateGetPositionLla_f(), stateGetPositionLla_i(), stateGetPositionNed_f(), stateGetPositionNed_i(), stateGetPositionUtm_f(), stateInit(), stateIsGlobalCoordinateValid(), stateIsLocalCoordinateValid(), stateSetLocalUtmOrigin_f(), stateSetPosition_f(), stateSetPosition_i(), stateSetPositionEcef_f(), stateSetPositionEcef_i(), stateSetPositionEnu_f(), stateSetPositionEnu_i(), stateSetPositionLla_f(), stateSetPositionLla_i(), stateSetPositionNed_f(), stateSetPositionNed_i(), and stateSetPositionUtm_f().
| bool State::utm_initialized_f |
True if utm origin (float) coordinate frame is initialsed.
Definition at line 236 of file state.h.
Referenced by acInfoCalcPositionEnu_f(), acInfoCalcPositionEnu_i(), error_output(), gps_cb(), ins_float_invariant_update_gps(), sim_overwrite_ins(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateCalcSpeedEnu_f(), stateCalcSpeedEnu_i(), stateCalcSpeedNed_f(), stateCalcSpeedNed_i(), stateInit(), stateIsLocalCoordinateValid(), and stateSetLocalUtmOrigin_f().
| struct UtmCoor_f State::utm_origin_f |
Definition of the origin of Utm coordinate system.
Defines the origin of the local NorthEastDown coordinate system in UTM coordinates, used as a reference when ned_origin is not initialized. Altitude is height above MSL. (float version)
Definition at line 233 of file state.h.
Referenced by acInfoCalcPositionEnu_f(), acInfoCalcPositionEnu_i(), acInfoCalcPositionUtm_f(), acInfoCalcPositionUtm_i(), gps_cb(), ins_float_invariant_update_gps(), ins_reset_altitude_ref(), nav_reset_alt(), nav_reset_reference(), set_ac_info_utm(), stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateInit(), and stateSetLocalUtmOrigin_f().
| struct UtmCoor_f State::utm_pos_f |
Position in UTM coordinates.
Units x,y: meters. Units z: meters above MSL
Definition at line 192 of file state.h.
Referenced by stateCalcPositionEnu_f(), stateCalcPositionEnu_i(), stateCalcPositionLla_f(), stateCalcPositionLla_i(), stateCalcPositionNed_f(), stateCalcPositionNed_i(), stateCalcPositionUtm_f(), stateGetPositionUtm_f(), stateSetPosition_f(), and stateSetPositionUtm_f().
 1.8.17
1.8.17