|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
 Include dependency graph for nav_rover_base.c:
Include dependency graph for nav_rover_base.c:Go to the source code of this file.
Macros | |
| #define | LINE_START_FUNCTION {} |
| Navigation along a figure O. More... | |
| #define | LINE_STOP_FUNCTION {} |
Functions | |
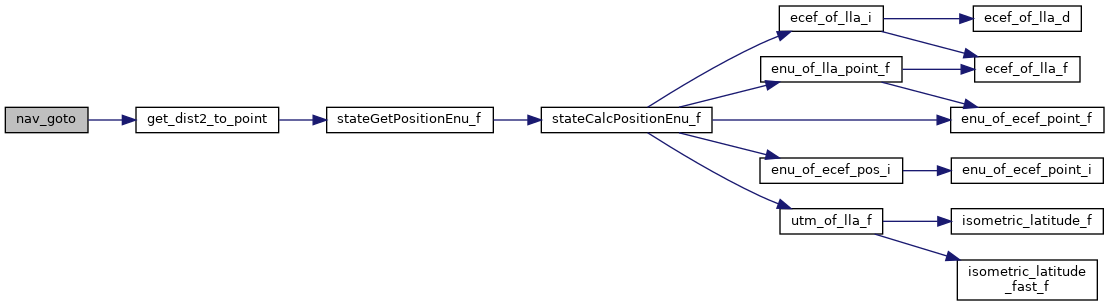
| static void | nav_goto (struct EnuCoor_f *wp) |
| Implement basic nav function. More... | |
| static void | nav_route (struct EnuCoor_f *wp_start, struct EnuCoor_f *wp_end) |
| static bool | nav_approaching (struct EnuCoor_f *wp, struct EnuCoor_f *from, float approaching_time) |
| static void | nav_circle (struct EnuCoor_f *wp_center, float radius) |
| static void | _nav_oval_init (void) |
| static void | nav_oval (struct EnuCoor_f *wp1, struct EnuCoor_f *wp2, float radius) |
| static void | send_segment (struct transport_tx *trans, struct link_device *dev) |
| static void | send_circle (struct transport_tx *trans, struct link_device *dev) |
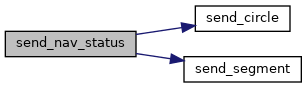
| static void | send_nav_status (struct transport_tx *trans, struct link_device *dev) |
| void | nav_rover_init (void) |
| Init and register nav functions. More... | |
Variables | |
| struct RoverNavBase | nav_rover_base |
Definition in file nav_rover_base.c.
| #define LINE_START_FUNCTION {} |
Navigation along a figure O.
One side leg is defined by waypoints [p1] and [p2]. The navigation goes through 4 states: OC1 (half circle next to [p1]), OR21 (route [p2] to [p1], OC2 (half circle next to [p2]) and OR12 (opposite leg). Initial state is the route along the desired segment (OC2).
Definition at line 147 of file nav_rover_base.c.
| #define LINE_STOP_FUNCTION {} |
Definition at line 150 of file nav_rover_base.c.
|
static |
Definition at line 153 of file nav_rover_base.c.
References RoverNavOval::count, nav_rover_base, OC2, RoverNavBase::oval, and RoverNavOval::status.
Referenced by nav_rover_init().
Here is the caller graph for this function:
|
static |
Definition at line 63 of file nav_rover_base.c.
References ARRIVED_AT_WAYPOINT, f, float_vect2_norm(), stateGetPositionEnu_f(), stateGetSpeedEnu_f(), VECT2_DIFF, VECT2_SMUL, VECT2_SUM, FloatVect2::x, and FloatVect2::y.
Referenced by nav_register_goto_wp(), and nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 103 of file nav_rover_base.c.
References CARROT_DIST, RoverNavCircle::center, RoverNavBase::circle, f, Max, Min, RoverNavigation::mode, nav, NAV_MODE_CIRCLE, nav_rover_base, pos_diff, RoverNavCircle::qdr, RoverNavCircle::radians, RoverNavCircle::radius, stateGetPositionEnu_f(), RoverNavigation::target, VECT2_ASSIGN, VECT2_COPY, VECT2_DIFF, VECT2_SUM, FloatVect2::x, and FloatVect2::y.
Referenced by nav_oval(), and nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Implement basic nav function.
Definition at line 34 of file nav_rover_base.c.
References RoverNavGoto::dist2_to_wp, get_dist2_to_point(), RoverNavBase::goto_wp, RoverNavigation::mode, nav, NAV_MODE_WAYPOINT, nav_rover_base, and RoverNavGoto::to.
Referenced by nav_register_goto_wp(), and nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 159 of file nav_rover_base.c.
References ANGLE_BFP_OF_REAL, CARROT, InitStage, INT32_ANGLE_PI, int32_atan2_2(), INT32_DEG_OF_RAD, LINE_START_FUNCTION, LINE_STOP_FUNCTION, nav_approaching_from(), nav_circle(), nav_oval_count, nav_route(), NavQdrCloseTo, OC1, OC2, OR12, OR21, POS_BFP_OF_REAL, waypoints, point::x, and point::y.
Referenced by nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 41 of file nav_rover_base.c.
References CARROT_DIST, RoverNavGoto::dist2_to_wp, f, RoverNavGoto::from, get_dist2_to_point(), RoverNavBase::goto_wp, RoverNavGoto::leg_length, RoverNavGoto::leg_progress, Max, RoverNavigation::mode, nav, NAV_MODE_ROUTE, nav_rover_base, pos_diff, stateGetPositionEnu_f(), RoverNavigation::target, RoverNavGoto::to, VECT2_DIFF, VECT2_SMUL, VECT2_SUM, FloatVect2::x, and FloatVect2::y.
Referenced by nav_oval(), and nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:| void nav_rover_init | ( | void | ) |
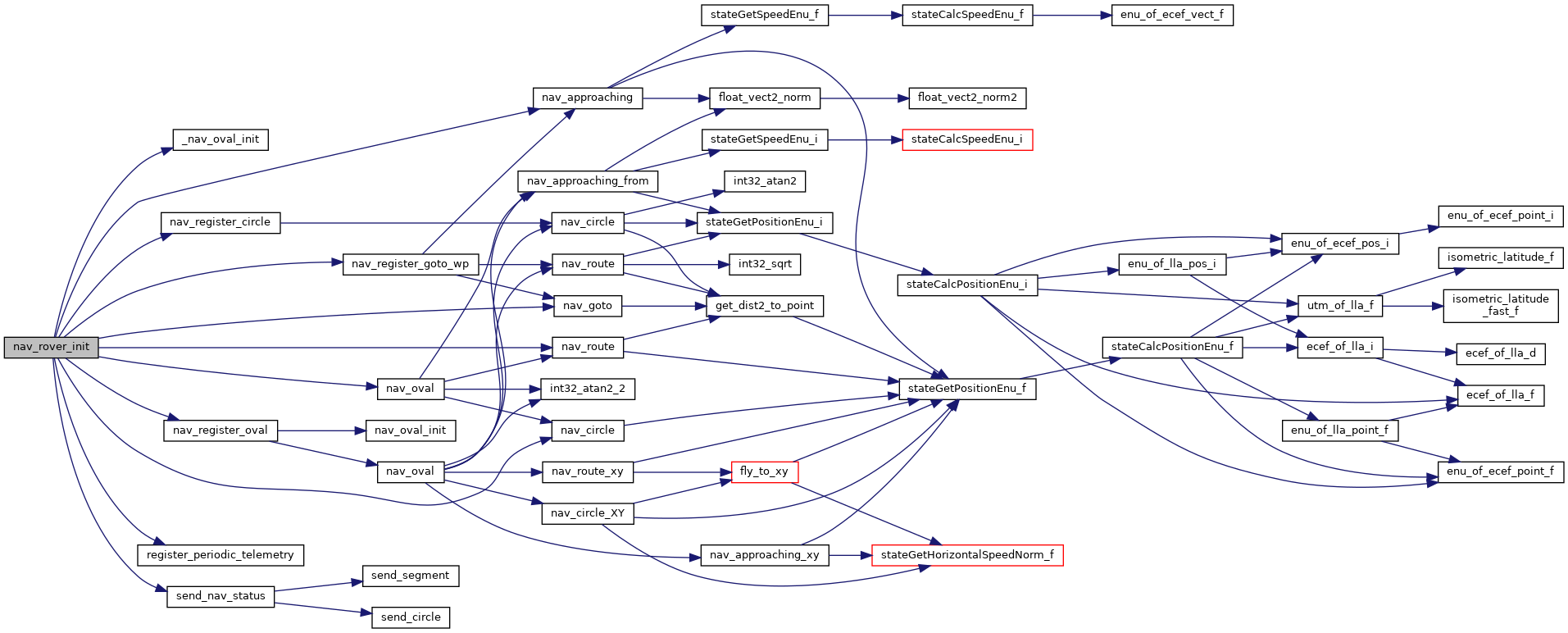
Init and register nav functions.
Definition at line 287 of file nav_rover_base.c.
References _nav_oval_init(), RoverNavBase::circle, DEFAULT_CIRCLE_RADIUS, DefaultPeriodic, RoverNavBase::goto_wp, RoverNavGoto::leg_length, RoverNavGoto::leg_progress, nav_approaching(), nav_circle(), nav_goto(), nav_oval(), nav_register_circle(), nav_register_goto_wp(), nav_register_oval(), nav_route(), nav_rover_base, RoverNavCircle::radius, register_periodic_telemetry(), and send_nav_status().
Here is the call graph for this function:
|
static |
Definition at line 260 of file nav_rover_base.c.
References RoverNavCircle::center, RoverNavBase::circle, dev, nav_rover_base, RoverNavCircle::radius, EnuCoor_f::x, and EnuCoor_f::y.
Referenced by send_nav_status().
Here is the caller graph for this function:
|
static |
Definition at line 268 of file nav_rover_base.c.
References block_time, dev, RoverNavigation::dist2_to_home, RoverNavGoto::dist2_to_wp, RoverNavBase::goto_wp, RoverNavigation::mode, nav, nav_block, NAV_MODE_CIRCLE, NAV_MODE_ROUTE, nav_rover_base, nav_stage, send_circle(), send_segment(), and stage_time.
Referenced by nav_rover_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
static |
Definition at line 251 of file nav_rover_base.c.
References dev, RoverNavGoto::from, RoverNavBase::goto_wp, nav_rover_base, RoverNavGoto::to, EnuCoor_f::x, and EnuCoor_f::y.
Referenced by send_nav_status().
Here is the caller graph for this function:| struct RoverNavBase nav_rover_base |
Definition at line 29 of file nav_rover_base.c.
Referenced by _nav_oval_init(), nav_circle(), nav_goto(), nav_route(), nav_rover_init(), send_circle(), send_nav_status(), and send_segment().
 1.8.17
1.8.17