|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
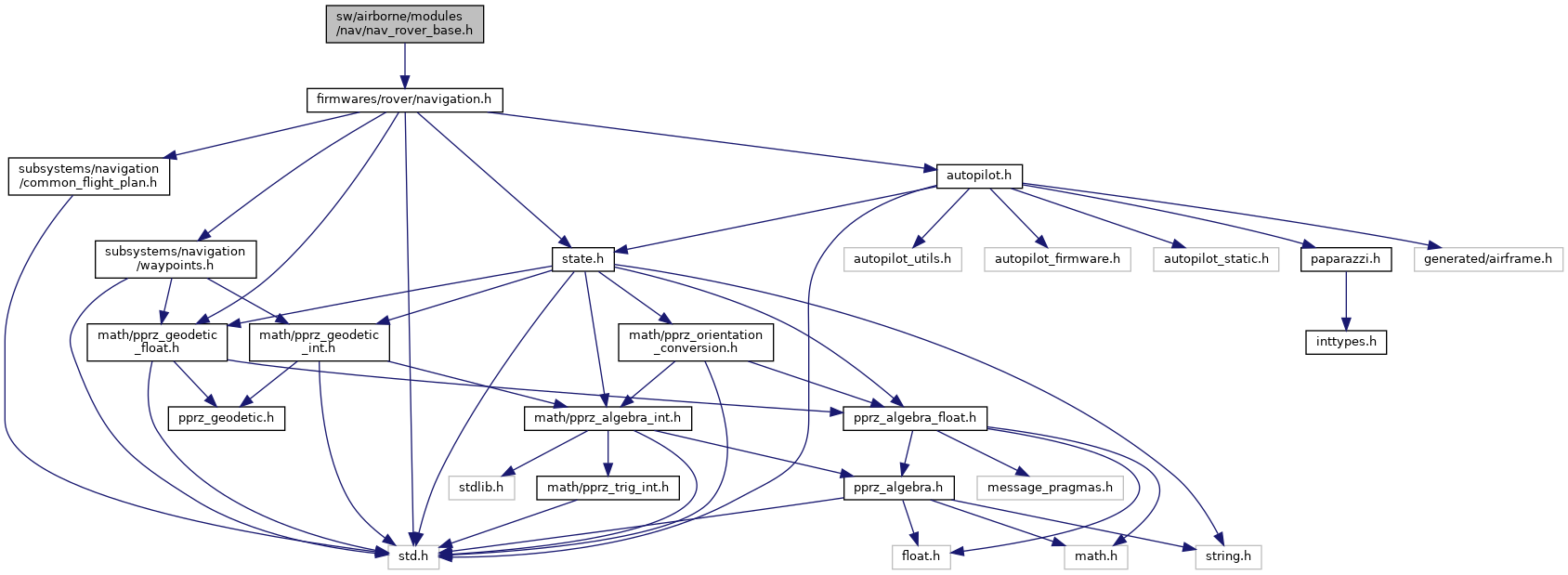
#include "firmwares/rover/navigation.h" Include dependency graph for nav_rover_base.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for nav_rover_base.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | RoverNavGoto |
| Waypoint and route pattern. More... | |
| struct | RoverNavCircle |
| Circle pattern. More... | |
| struct | RoverNavOval |
| struct | RoverNavBase |
| Basic Nav struct. More... | |
Macros | |
| #define | NavCircleCount() (fabsf(nav_rover_base.circle.radians) / (2*M_PI)) |
| Macros for circle nav. More... | |
| #define | NavCircleQdr() ({ float qdr = DegOfRad(M_PI_2 - nav_rover_base.circle.qdr); NormCourse(qdr); qdr; }) |
| #define | CloseDegAngles(_c1, _c2) ({ float _diff = _c1 - _c2; NormCourse(_diff); 350 < _diff || _diff < 10; }) |
| #define | CloseRadAngles(_c1, _c2) ({ float _diff = _c1 - _c2; NormRadAngle(_diff); fabsf(_diff) < 0.0177; }) |
| #define | NavQdrCloseTo(x) CloseDegAngles(x, NavCircleQdr()) |
| True if x (in degrees) is close to the current QDR (less than 10 degrees) More... | |
| #define | NavCourseCloseTo(x) CloseDegAngles(x, DegOfRad(stateGetHorizontalSpeedDir_f())) |
Enumerations | |
| enum | oval_status { OR12, OC2, OR21, OC1, OR12, OC2, OR21, OC1, OR12, OC2, OR21, OC1 } |
| Oval pattern. More... | |
Functions | |
| void | nav_rover_init (void) |
| Init and register nav functions. More... | |
Variables | |
| struct RoverNavBase | nav_rover_base |
Definition in file nav_rover_base.h.
| struct RoverNavGoto |
Waypoint and route pattern.
Definition at line 34 of file nav_rover_base.h.
Collaboration diagram for RoverNavGoto:| Data Fields | ||
|---|---|---|
| float | dist2_to_wp | squared distance to next waypoint |
| struct EnuCoor_f | from | start WP position |
| float | leg_length | leg length |
| float | leg_progress | progress over leg |
| struct EnuCoor_f | to | end WP position |
| struct RoverNavCircle |
Circle pattern.
Definition at line 44 of file nav_rover_base.h.
Collaboration diagram for RoverNavCircle:| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | center | center WP position |
| float | qdr | qdr in radians |
| float | radians | incremental angular distance |
| float | radius | radius in meters |
| struct RoverNavOval |
Definition at line 54 of file nav_rover_base.h.
| Data Fields | ||
|---|---|---|
| uint8_t | count | number of laps |
| enum oval_status | status | oval status |
| struct RoverNavBase |
Basic Nav struct.
Definition at line 61 of file nav_rover_base.h.
Collaboration diagram for RoverNavBase:| Data Fields | ||
|---|---|---|
| struct RoverNavCircle | circle | |
| struct RoverNavGoto | goto_wp | |
| struct RoverNavOval | oval | |
| #define CloseDegAngles | ( | _c1, | |
| _c2 | |||
| ) | ({ float _diff = _c1 - _c2; NormCourse(_diff); 350 < _diff || _diff < 10; }) |
Definition at line 77 of file nav_rover_base.h.
| #define CloseRadAngles | ( | _c1, | |
| _c2 | |||
| ) | ({ float _diff = _c1 - _c2; NormRadAngle(_diff); fabsf(_diff) < 0.0177; }) |
Definition at line 78 of file nav_rover_base.h.
| #define NavCircleCount | ( | ) | (fabsf(nav_rover_base.circle.radians) / (2*M_PI)) |
Macros for circle nav.
Definition at line 74 of file nav_rover_base.h.
| #define NavCircleQdr | ( | ) | ({ float qdr = DegOfRad(M_PI_2 - nav_rover_base.circle.qdr); NormCourse(qdr); qdr; }) |
Definition at line 75 of file nav_rover_base.h.
| #define NavCourseCloseTo | ( | x | ) | CloseDegAngles(x, DegOfRad(stateGetHorizontalSpeedDir_f())) |
Definition at line 83 of file nav_rover_base.h.
| #define NavQdrCloseTo | ( | x | ) | CloseDegAngles(x, NavCircleQdr()) |
True if x (in degrees) is close to the current QDR (less than 10 degrees)
Definition at line 82 of file nav_rover_base.h.
| enum oval_status |
Oval pattern.
| Enumerator | |
|---|---|
| OR12 | |
| OC2 | |
| OR21 | |
| OC1 | |
| OR12 | |
| OC2 | |
| OR21 | |
| OC1 | |
| OR12 | |
| OC2 | |
| OR21 | |
| OC1 | |
Definition at line 53 of file nav_rover_base.h.
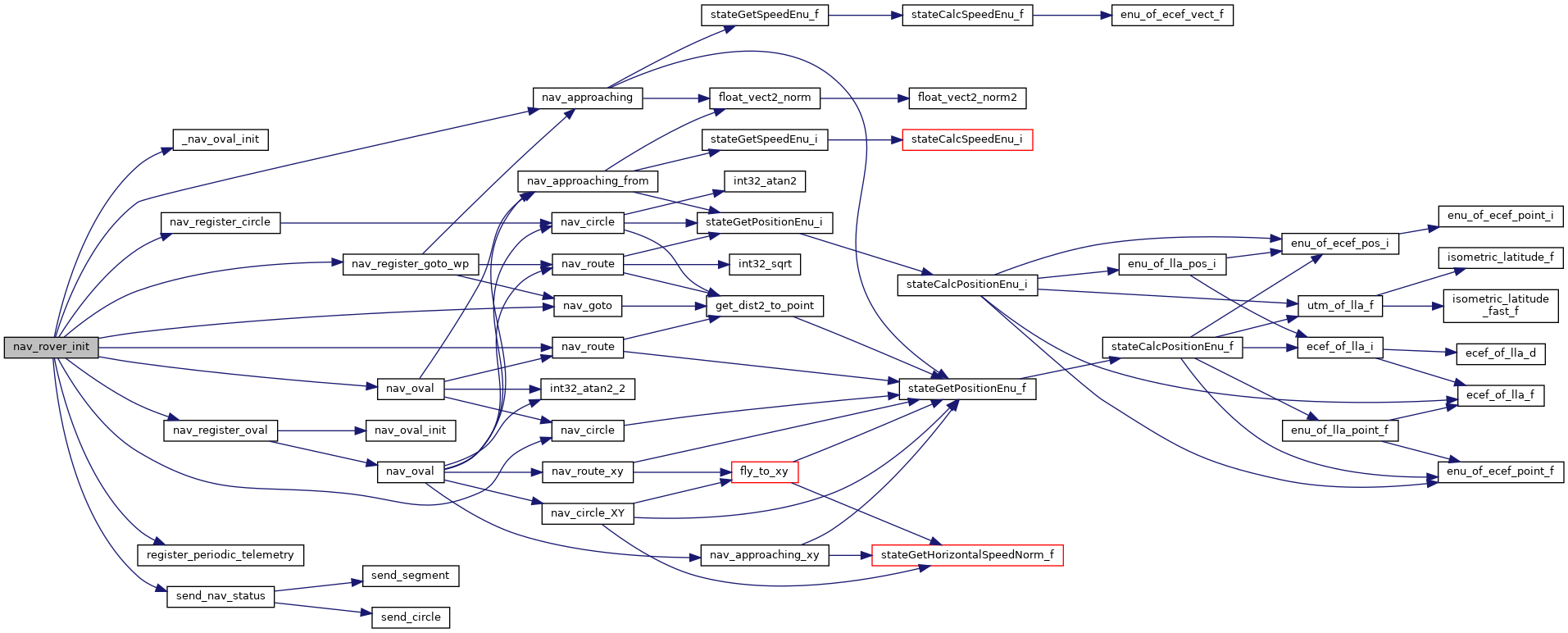
| void nav_rover_init | ( | void | ) |
Init and register nav functions.
Definition at line 287 of file nav_rover_base.c.
References _nav_oval_init(), RoverNavBase::circle, DEFAULT_CIRCLE_RADIUS, DefaultPeriodic, RoverNavBase::goto_wp, RoverNavGoto::leg_length, RoverNavGoto::leg_progress, nav_approaching(), nav_circle(), nav_goto(), nav_oval(), nav_register_circle(), nav_register_goto_wp(), nav_register_oval(), nav_route(), nav_rover_base, RoverNavCircle::radius, register_periodic_telemetry(), and send_nav_status().
Here is the call graph for this function:| struct RoverNavBase nav_rover_base |
Definition at line 29 of file nav_rover_base.c.
Referenced by _nav_oval_init(), nav_circle(), nav_goto(), nav_route(), nav_rover_init(), send_circle(), send_nav_status(), and send_segment().
 1.8.17
1.8.17