|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.18.0_stable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "generated/airframe.h"#include "firmwares/rotorcraft/guidance/guidance_indi_hybrid.h"#include "subsystems/ins/ins_int.h"#include "subsystems/radio_control.h"#include "state.h"#include "subsystems/imu.h"#include "firmwares/rotorcraft/guidance/guidance_h.h"#include "firmwares/rotorcraft/guidance/guidance_v.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude.h"#include "firmwares/rotorcraft/autopilot_rc_helpers.h"#include "mcu_periph/sys_time.h"#include "autopilot.h"#include "stabilization/stabilization_attitude_ref_quat_int.h"#include "firmwares/rotorcraft/stabilization.h"#include "stdio.h"#include "filters/low_pass_filter.h"#include "subsystems/abi.h"#include "firmwares/rotorcraft/stabilization/stabilization_attitude_rc_setpoint.h"#include "firmwares/rotorcraft/navigation.h" Include dependency graph for guidance_indi_hybrid.c:
Include dependency graph for guidance_indi_hybrid.c:Go to the source code of this file.
Macros | |
| #define | GUIDANCE_INDI_SPEED_GAIN 1.8 |
| #define | GUIDANCE_INDI_SPEED_GAINZ 1.8 |
| #define | GUIDANCE_INDI_POS_GAIN = 0.5; |
| #define | GUIDANCE_INDI_POS_GAINZ = 0.5; |
| #define | MAX_DECELERATION 1. |
| #define | GUIDANCE_INDI_FILTER_CUTOFF 3.0 |
| #define | GUIDANCE_INDI_PITCH_EFF_SCALING 1.0 |
Functions | |
| void | guidance_indi_propagate_filters (void) |
| Low pass the accelerometer measurements to remove noise from vibrations. More... | |
| static void | guidance_indi_calcg_wing (struct FloatMat33 *Gmat) |
| Calculate the matrix of partial derivatives of the roll, pitch and thrust w.r.t. More... | |
| static float | guidance_indi_get_liftd (float airspeed, float theta) |
| Get the derivative of lift w.r.t. More... | |
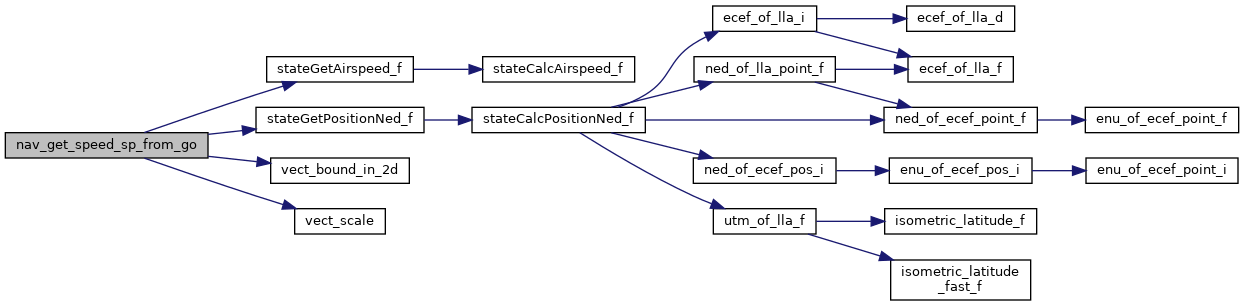
| struct FloatVect3 | nav_get_speed_sp_from_go (struct EnuCoor_i target, float pos_gain) |
| Go to a waypoint in the shortest way. More... | |
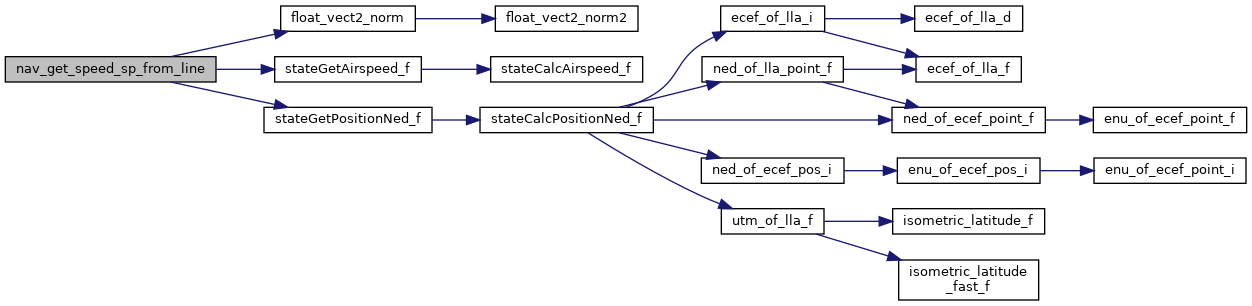
| struct FloatVect3 | nav_get_speed_sp_from_line (struct FloatVect2 line_v_enu, struct FloatVect2 to_end_v_enu, struct EnuCoor_i target, float pos_gain) |
| follow a line. More... | |
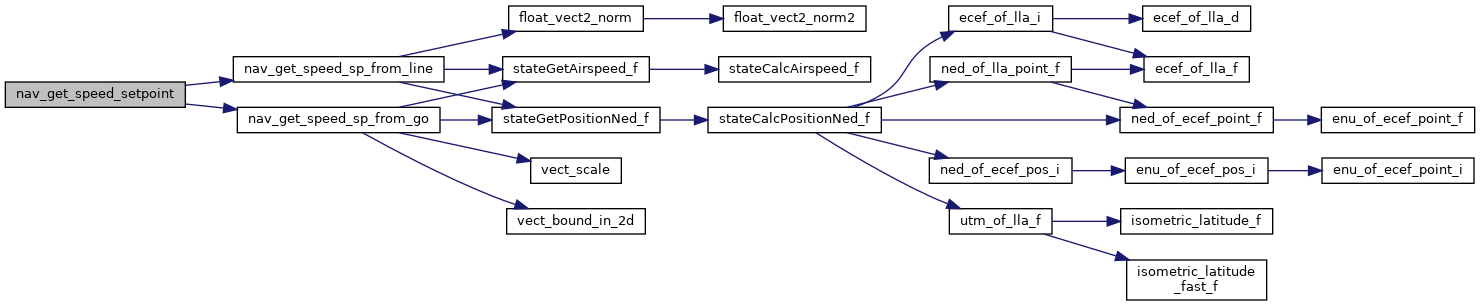
| struct FloatVect3 | nav_get_speed_setpoint (float pos_gain) |
| function that returns a speed setpoint based on flight plan. More... | |
| void | guidance_indi_init (void) |
| Init function. More... | |
| void | guidance_indi_enter (void) |
| Call upon entering indi guidance. More... | |
| void | guidance_indi_run (float *heading_sp) |
Variables | |
| struct guidance_indi_hybrid_params | gih_params |
| struct FloatVect3 | sp_accel = {0.0,0.0,0.0} |
| float | guidance_indi_max_airspeed = GUIDANCE_INDI_MAX_AIRSPEED |
| float | inv_eff [4] |
| float | lift_pitch_eff = GUIDANCE_INDI_PITCH_LIFT_EFF |
| struct FloatEulers | eulers_zxy |
| state eulers in zxy order More... | |
| float | thrust_act = 0 |
| Butterworth2LowPass | filt_accel_ned [3] |
| Butterworth2LowPass | roll_filt |
| Butterworth2LowPass | pitch_filt |
| Butterworth2LowPass | thrust_filt |
| Butterworth2LowPass | accely_filt |
| struct FloatVect2 | desired_airspeed |
| struct FloatMat33 | Ga |
| struct FloatMat33 | Ga_inv |
| struct FloatVect3 | euler_cmd |
| float | filter_cutoff = GUIDANCE_INDI_FILTER_CUTOFF |
| struct FloatEulers | guidance_euler_cmd |
| float | thrust_in |
| struct FloatVect3 | speed_sp = {0.0, 0.0, 0.0} |
A guidance mode based on Incremental Nonlinear Dynamic Inversion Come to IROS2016 to learn more!
Definition in file guidance_indi_hybrid.c.
| #define GUIDANCE_INDI_FILTER_CUTOFF 3.0 |
Definition at line 100 of file guidance_indi_hybrid.c.
| #define GUIDANCE_INDI_PITCH_EFF_SCALING 1.0 |
| #define GUIDANCE_INDI_POS_GAIN = 0.5; |
Definition at line 60 of file guidance_indi_hybrid.c.
| #define GUIDANCE_INDI_POS_GAINZ = 0.5; |
Definition at line 61 of file guidance_indi_hybrid.c.
| #define GUIDANCE_INDI_SPEED_GAIN 1.8 |
Definition at line 55 of file guidance_indi_hybrid.c.
| #define GUIDANCE_INDI_SPEED_GAINZ 1.8 |
Definition at line 56 of file guidance_indi_hybrid.c.
| #define MAX_DECELERATION 1. |
Definition at line 78 of file guidance_indi_hybrid.c.
|
static |
Calculate the matrix of partial derivatives of the roll, pitch and thrust w.r.t.
the NED accelerations, taking into account the lift of a wing that is horizontal at -90 degrees pitch
| Gmat | array to write the matrix to [3x3] |
Definition at line 441 of file guidance_indi_hybrid.c.
References eulers_zxy, guidance_indi_get_liftd(), GUIDANCE_INDI_PITCH_EFF_SCALING, FloatEulers::phi, FloatEulers::psi, RMAT_ELMT, stateGetAirspeed_f(), mesonh.mesonh_atmosphere::T, and FloatEulers::theta.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_enter | ( | void | ) |
Call upon entering indi guidance.
Definition at line 165 of file guidance_indi_hybrid.c.
References filt_accel_ned, filter_cutoff, init_butterworth_2_low_pass(), FloatEulers::phi, pitch_filt, roll_filt, stabilization_cmd, stateGetNedToBodyEulers_f(), FloatEulers::theta, thrust_act, thrust_filt, and thrust_in.
Here is the call graph for this function:
|
static |
Get the derivative of lift w.r.t.
pitch.
| airspeed | The airspeed says most about the flight condition |
Definition at line 483 of file guidance_indi_hybrid.c.
References lift_pitch_eff.
Referenced by guidance_indi_calcg_wing().
Here is the caller graph for this function:| void guidance_indi_init | ( | void | ) |
Init function.
Definition at line 146 of file guidance_indi_hybrid.c.
References accel_sp_cb(), accel_sp_ev, accely_filt, filt_accel_ned, filter_cutoff, GUIDANCE_INDI_ACCEL_SP_ID, init_butterworth_2_low_pass(), pitch_filt, roll_filt, and thrust_filt.
Here is the call graph for this function:| void guidance_indi_propagate_filters | ( | void | ) |
Low pass the accelerometer measurements to remove noise from vibrations.
The roll and pitch also need to be filtered to synchronize them with the acceleration Called as a periodic function with PERIODIC_FREQ
Definition at line 420 of file guidance_indi_hybrid.c.
References ACCEL_FLOAT_OF_BFP, accely_filt, eulers_zxy, filt_accel_ned, FloatEulers::phi, pitch_filt, roll_filt, stateGetAccelBody_i(), stateGetAccelNed_f(), FloatEulers::theta, update_butterworth_2_low_pass(), NedCoor_f::x, NedCoor_f::y, and NedCoor_f::z.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| void guidance_indi_run | ( | float * | heading_sp | ) |
| heading_sp | the desired heading [rad] |
main indi guidance function
Definition at line 176 of file guidance_indi_hybrid.c.
References accely_filt, ANGLE_BFP_OF_REAL, AP_MODE_NAV, autopilot, BFP_OF_REAL, control_increment, desired_airspeed, euler_cmd, eulers_zxy, filt_accel_ned, FLOAT_ANGLE_NORMALIZE, float_eulers_of_quat_yxz(), float_eulers_of_quat_zxy(), float_quat_normalize(), float_quat_of_eulers_yxz(), float_quat_of_eulers_zxy(), FLOAT_VECT2_NORM, Ga, Ga_inv, get_sys_time_float(), gih_params, guidance_euler_cmd, guidance_h, GUIDANCE_H_MAX_BANK, guidance_indi_calcg_wing(), guidance_indi_calcG_yxz(), guidance_indi_max_airspeed, guidance_indi_max_bank, guidance_indi_pos_gain, guidance_indi_propagate_filters(), guidance_indi_speed_gain, guidance_v_z_ref, indi_accel_sp, indi_accel_sp_set_2d, indi_accel_sp_set_3d, INT32_ANGLE_FRAC, INT32_PERCENTAGE_FRAC, INT_MULT_RSHIFT, MAT33_INV, MAT33_VECT3_MUL, Min, pprz_autopilot::mode, nav_get_speed_setpoint(), SecondOrderLowPass::o, FloatEulers::phi, pitch_filt, HorizontalGuidanceReference::pos, POS_FLOAT_OF_BFP, guidance_indi_hybrid_params::pos_gain, guidance_indi_hybrid_params::pos_gainz, FloatEulers::psi, QUAT_BFP_OF_REAL, radio_control, RADIO_PITCH, RADIO_ROLL, RADIO_THROTTLE, HorizontalGuidance::ref, roll_filt, sp_accel, guidance_indi_hybrid_params::speed_gain, guidance_indi_hybrid_params::speed_gainz, speed_sp, stab_att_sp_quat, stabilization_cmd, stateGetAirspeed_f(), stateGetNedToBodyEulers_f(), stateGetNedToBodyQuat_f(), stateGetPositionNed_f(), stateGetPositionNed_i(), stateGetSpeedNed_f(), FloatEulers::theta, thrust_filt, thrust_in, THRUST_INCREMENT_ID, time_of_accel_sp_2d, time_of_accel_sp_3d, transition_percentage, transition_theta_offset, RadioControl::values, VECT2_DIFF, vect_bound_in_2d(), FloatVect2::x, FloatVect3::x, NedCoor_f::x, Int32Vect2::x, FloatVect2::y, FloatVect3::y, NedCoor_f::y, Int32Vect2::y, FloatVect3::z, and NedCoor_f::z.
Here is the call graph for this function:| struct FloatVect3 nav_get_speed_setpoint | ( | float | pos_gain | ) |
function that returns a speed setpoint based on flight plan.
The routines are meant for a hybrid UAV and assume measurement of airspeed. Makes the vehicle track a vector field with a sink at a waypoint. Use force_forward to maintain airspeed and fly 'through' waypoints.
Definition at line 506 of file guidance_indi_hybrid.c.
References horizontal_mode, HORIZONTAL_MODE_ROUTE, nav_get_speed_sp_from_go(), nav_get_speed_sp_from_line(), navigation_target, speed_sp, and to_end_vect.
Referenced by guidance_indi_run().
Here is the call graph for this function: Here is the caller graph for this function:| struct FloatVect3 nav_get_speed_sp_from_go | ( | struct EnuCoor_i | target, |
| float | pos_gain | ||
| ) |
Go to a waypoint in the shortest way.
| target | the target waypoint |
Definition at line 611 of file guidance_indi_hybrid.c.
References FLOAT_VECT2_NORM, force_forward, gih_params, guidance_v_mode, GUIDANCE_V_MODE_NAV, guidance_v_zd_sp, MAX_DECELERATION, Min, nav_climb_vspeed, nav_descend_vspeed, nav_max_speed, POS_FLOAT_OF_BFP, guidance_indi_hybrid_params::pos_gainz, SPEED_FLOAT_OF_BFP, stateGetAirspeed_f(), stateGetPositionNed_f(), target, VECT3_ASSIGN, VECT3_DIFF, VECT3_SMUL, vect_bound_in_2d(), vect_scale(), vertical_mode, VERTICAL_MODE_CLIMB, FloatVect2::x, FloatVect2::y, and FloatVect3::z.
Referenced by nav_get_speed_setpoint().
Here is the call graph for this function: Here is the caller graph for this function:| struct FloatVect3 nav_get_speed_sp_from_line | ( | struct FloatVect2 | line_v_enu, |
| struct FloatVect2 | to_end_v_enu, | ||
| struct EnuCoor_i | target, | ||
| float | pos_gain | ||
| ) |
follow a line.
| line_v_enu | 2d vector from beginning (0) line to end in enu |
| to_end_v_enu | 2d vector from current position to end in enu |
| target | end waypoint in enu |
Definition at line 525 of file guidance_indi_hybrid.c.
References direction, float_vect2_norm(), force_forward, gih_params, guidance_v_mode, GUIDANCE_V_MODE_NAV, guidance_v_zd_sp, nav_climb_vspeed, nav_descend_vspeed, nav_max_speed, POS_FLOAT_OF_BFP, guidance_indi_hybrid_params::pos_gainz, SPEED_FLOAT_OF_BFP, stateGetAirspeed_f(), stateGetPositionNed_f(), target, VECT2_ADD, VECT2_ASSIGN, VECT2_SMUL, VECT3_ASSIGN, vertical_mode, VERTICAL_MODE_CLIMB, FloatVect2::x, FloatVect2::y, FloatVect3::z, and NedCoor_f::z.
Referenced by nav_get_speed_setpoint().
Here is the call graph for this function: Here is the caller graph for this function:| Butterworth2LowPass accely_filt |
Definition at line 121 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_init(), guidance_indi_propagate_filters(), and guidance_indi_run().
| struct FloatVect2 desired_airspeed |
Definition at line 123 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().
| struct FloatVect3 euler_cmd |
Definition at line 127 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().
| struct FloatEulers eulers_zxy |
state eulers in zxy order
Definition at line 114 of file guidance_indi_hybrid.c.
Referenced by ctrl_eff_scheduling_periodic_b(), guidance_indi_calcg_wing(), guidance_indi_propagate_filters(), guidance_indi_run(), and send_fp().
| Butterworth2LowPass filt_accel_ned[3] |
Definition at line 117 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_init(), guidance_indi_propagate_filters(), and guidance_indi_run().
| float filter_cutoff = GUIDANCE_INDI_FILTER_CUTOFF |
Definition at line 129 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_init().
| struct FloatMat33 Ga |
Definition at line 125 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().
| struct FloatMat33 Ga_inv |
Definition at line 126 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().
| struct guidance_indi_hybrid_params gih_params |
Definition at line 64 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run(), nav_get_speed_sp_from_go(), and nav_get_speed_sp_from_line().
| struct FloatEulers guidance_euler_cmd |
Definition at line 131 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().
| float guidance_indi_max_airspeed = GUIDANCE_INDI_MAX_AIRSPEED |
Definition at line 107 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().
| float inv_eff[4] |
Definition at line 109 of file guidance_indi_hybrid.c.
| float lift_pitch_eff = GUIDANCE_INDI_PITCH_LIFT_EFF |
Definition at line 111 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_get_liftd().
| Butterworth2LowPass pitch_filt |
Definition at line 119 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_init(), guidance_indi_propagate_filters(), and guidance_indi_run().
| Butterworth2LowPass roll_filt |
Definition at line 118 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_init(), guidance_indi_propagate_filters(), and guidance_indi_run().
| struct FloatVect3 sp_accel = {0.0,0.0,0.0} |
Definition at line 81 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_run().
| struct FloatVect3 speed_sp = {0.0, 0.0, 0.0} |
Definition at line 134 of file guidance_indi_hybrid.c.
Referenced by gh_update_ref_from_speed_sp(), guidance_indi_run(), nav_get_speed_setpoint(), navigation_update_wp_from_speed(), orange_avoider_guided_periodic(), and read_rc_setpoint_speed_i().
| float thrust_act = 0 |
Definition at line 116 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_enter().
| Butterworth2LowPass thrust_filt |
Definition at line 120 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_init(), and guidance_indi_run().
| float thrust_in |
Definition at line 132 of file guidance_indi_hybrid.c.
Referenced by guidance_indi_enter(), and guidance_indi_run().
 1.8.17
1.8.17