|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
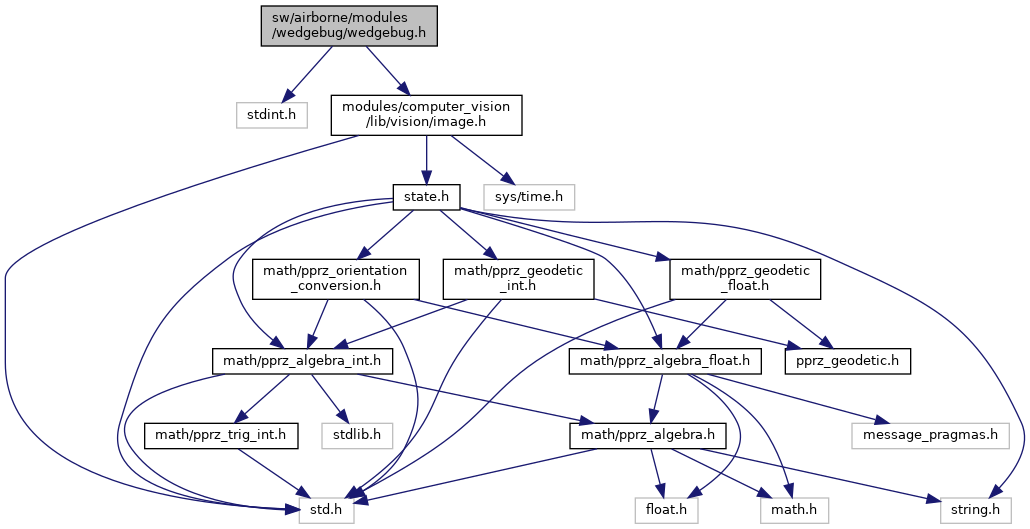
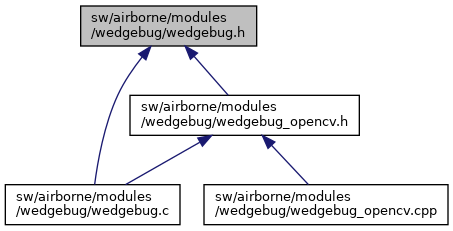
 Include dependency graph for wedgebug.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for wedgebug.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | kernel_C1 |
Functions | |
| void | wedgebug_init (void) |
| void | wedgebug_periodic (void) |
| void | post_disparity_crop_rect (struct crop_t *_img_cropped_info, struct img_size_t *_original_img_dims, const int disp_n, const int block_size) |
| void | set_state (uint8_t _state, uint8_t change_allowed) |
| void | kernel_create (struct kernel_C1 *kernel, uint16_t width, uint16_t height, enum image_type type) |
| void | kernel_free (struct kernel_C1 *kernel) |
| uint8_t | getMedian (uint8_t *a, uint32_t n) |
Variables | |
| int | N_disparities |
| Variable that saves previous mode to control the drone, for some memory. | |
| int | block_size_disparities |
| Number of disparity levels (0-this number) | |
| int | min_disparity |
| Block size used for the block matching (SBM) function. | |
| int | max_disparity |
| uint16_t | K_median_h |
| Width of kernel for the median kernel. | |
| uint16_t | K_median_w |
| SE size for the Sobel operation, to detect edges. | |
| int | SE_opening_OCV |
| int | SE_closing_OCV |
| SE size for the opening operation. | |
| int | SE_dilation_OCV_1 |
| SE size for the closing operation. | |
| int | SE_dilation_OCV_2 |
| SE size for the first dilation operation. | |
| int | SE_erosion_OCV |
| SE size for the second dilation operation (see state 3 "WEDGEBUG_START" and state 6 "POSITION_EDGE" ) | |
| uint16_t | threshold_median_depth |
| Below this distance (in meters) it is considered that the robot has reached the goal, in DIRECT_CONTROL mode. | |
| uint16_t | threshold_depth_of_edges |
| Below this median depth (cm), an obstacle is considered to block the way (i.e. the blocking obstacle needs to be close) | |
| int | threshold_edge_magnitude |
| Below this depth (cm) edges are eligible for the WedgeBug algorith. | |
| float | threshold_distance_to_goal |
| Above this disparity edges are eligible for WedgeBug algorithm (i.e. edges cannot be very far away) | |
| float | threshold_distance_to_angle |
| Below this distance (in meters) it is considered that the robot has reached the goal. | |
| int16_t | max_obstacle_confidence |
| This is the confidence that no edge was found. | |
| int16_t | max_free_path_confidence |
| This is the max confidence that an obstacle was spotted. | |
| int16_t | max_position_confidence |
| This is the max confidence that an obstacle was not spotted. | |
| int16_t | max_heading_confidence |
| This is the max confidence that a specific position was reached. | |
| int16_t | max_edge_found_micro_confidence |
| This is the max confidence that a specific heading was reached. | |
| int16_t | max_edge_found_macro_confidence |
| This is the max confidence that edges (micro-see above) were found. | |
| int16_t | max_no_edge_found_confidence |
| This is the max confidence that edges (macro-see above were found. | |
| int | heat_map_type |
| Variable to hold distance from robot to edge to goal (used in EDGE_SCAN (9) state) | |
| uint8_t | save_images_flag |
| Set to 1 if control mode of drone is changed, 0 otherwise. | |
Note.
Definition in file wedgebug.h.
| struct kernel_C1 |
Definition at line 42 of file wedgebug.h.
| Data Fields | ||
|---|---|---|
| uint32_t | buf_size | Size of values of weight buffer and values buffer. |
| void * | buf_values | Kernel value buffer. These are the values underneath the kernel. |
| void * | buf_weights | Kernel weight buffer. |
| uint16_t | h | Kernel height. |
| enum image_type | type | |
| uint16_t | w | |
Definition at line 469 of file wedgebug.c.
References foo.
Referenced by median_disparity_to_point().
Here is the caller graph for this function:| void kernel_create | ( | struct kernel_C1 * | kernel, |
| uint16_t | width, | ||
| uint16_t | height, | ||
| enum image_type | type | ||
| ) |
Definition at line 427 of file wedgebug.c.
References foo, IMAGE_GRADIENT, IMAGE_INT16, IMAGE_JPEG, IMAGE_YUV422, and image_t::type.
Referenced by wedgebug_init().
Here is the caller graph for this function:Definition at line 455 of file wedgebug.c.
References foo.
|
extern |
Definition at line 401 of file wedgebug.c.
References foo.
Referenced by SBM_OCV(), and wedgebug_init().
Here is the caller graph for this function:Definition at line 420 of file wedgebug.c.
References current_state, and foo.
Referenced by wedgebug_periodic().
Here is the caller graph for this function:Below this median depth (cm), an obstacle is considered to block the way (i.e. the blocking obstacle needs to be close)
Below this depth (cm) edges are eligible for the WedgeBug algorithm
Definition at line 1584 of file wedgebug.c.
References allow_state_change_EDGE_SCAN, allow_state_change_MOVE_TO_EDGE, allow_state_change_MOVE_TO_GOAL, allow_state_change_POSITION_EDGE, allow_state_change_POSITION_GOAL, allow_state_change_WEDGEBUG_START, block_size_disparities, kernel_C1::buf_size, c_img, c_img_cropped, clock_background_processes, clock_FSM, clock_total_time, clock_total_time_current, clock_total_time_previous, copy_left_img_func(), copy_right_img_func(), cv_add_to_device(), distance_robot_edge_goal, distance_traveled, edge_found_macro_confidence, edge_search_area, foo, free_path_confidence, image_t::h, img_size_t::h, crop_t::h, kernel_C1::h, heading_confidence, heat_map_type, image_create(), IMAGE_GRAYSCALE, IMAGE_INT16, IMAGE_YUV422, img_cropped_dims, img_cropped_info, img_depth_int16_cropped, img_dims, img_disparity_int16_cropped, img_disparity_int8_cropped, img_edges_int8_cropped, img_left, img_left_int8, img_left_int8_cropped, img_middle_int16_cropped, img_middle_int8_cropped, img_right, img_right_int8, initial_heading, ES_angles::initiated, is_edge_found_macro_flag, is_edge_found_micro_flag, is_heading_reached_flag, ES_angles::is_left_reached_flag, is_mode_changed_flag, is_no_edge_found_flag, is_obstacle_detected_flag, is_path_free_flag, ES_angles::is_right_reached_flag, is_setpoint_reached_flag, is_start_reached_flag, is_state_changed_flag, is_total_timer_on_flag, K_median_h, K_median_w, kernel_create(), kernel_median_dims, FloatRMat::m, max_edge_found_macro_confidence, max_edge_found_micro_confidence, max_free_path_confidence, max_heading_confidence, max_no_edge_found_confidence, max_obstacle_confidence, max_position_confidence, median_kernel, median_kernel16bit, N_disparities, no_edge_found_confidence, number_of_states, obstacle_confidence, position_confidence, post_disparity_crop_rect(), previous_mode, previous_state, principal_points(), Rcr, Rwnedwenu, save_images_flag, SE_closing_OCV, SE_dilation_OCV_1, SE_dilation_OCV_2, SE_erosion_OCV, SE_opening_OCV, SE_sobel_OCV, threshold_depth_of_edges, threshold_distance_to_angle, threshold_distance_to_goal, threshold_distance_to_goal_direct, threshold_distance_to_goal_manual, threshold_edge_magnitude, threshold_median_depth, kernel_C1::type, Va_to_Vb(), VCr, VDISTANCEPOSITIONwned, VGOALwenu, VGOALwned, VNEDwenu, VSTARTwenu, VSTARTwned, image_t::w, img_size_t::w, crop_t::w, kernel_C1::w, WaypointAlt, WaypointX, WaypointY, WEDGEBUG_CAMERA_LEFT_FPS, WEDGEBUG_CAMERA_RIGHT_FPS, FloatVect3::x, point_t::x, crop_t::x, FloatVect3::y, point_t::y, crop_t::y, and FloatVect3::z.
Here is the call graph for this function:Definition at line 1837 of file wedgebug.c.
References allow_state_change_EDGE_SCAN, allow_state_change_MOVE_TO_EDGE, allow_state_change_MOVE_TO_GOAL, allow_state_change_POSITION_EDGE, allow_state_change_WEDGEBUG_START, AP_MODE_ATTITUDE_DIRECT, AP_MODE_ATTITUDE_Z_HOLD, AP_MODE_GUIDED, AP_MODE_NAV, AUTONOMOUS_GUIDED, AUTONOMOUS_NAV, autopilot_get_mode(), autopilot_guided_goto_ned(), background_processes_16bit(), c_img_cropped, clock_background_processes, clock_FSM, clock_total_time, clock_total_time_current, clock_total_time_previous, counter_cycles, counter_state, current_mode, current_state, DIRECT_CONTROL, distance_robot_edge_goal, distance_traveled, edge_found_macro_confidence, EDGE_SCAN, edge_search_area, find_best_edge_coordinates2(), FLOAT_ANGLE_NORMALIZE, float_vect3_norm_two_points(), float_vect_copy(), foo, free_path_confidence, guidance_h_hover_enter(), guidance_h_set_heading(), guidance_h_set_pos(), guidance_v_set_z(), heading, heading_confidence, ES_angles::heading_initial, ES_angles::heading_max_left, ES_angles::heading_max_right, heading_towards_setpoint_WNED(), heading_towards_waypoint(), heat_map_type, img_depth_int16_cropped, img_disparity_int8_cropped, img_edges_int8_cropped, img_left_int8, img_middle_int8_cropped, img_right_int8, initial_heading, ES_angles::initiated, is_edge_found_macro_flag, is_edge_found_micro_flag, is_heading_reached(), is_heading_reached_flag, ES_angles::is_left_reached_flag, is_mode_changed_flag, is_no_edge_found_flag, is_obstacle_detected_flag, is_path_free_flag, ES_angles::is_right_reached_flag, is_setpoint_reached(), is_setpoint_reached_flag, is_start_reached_flag, is_state_changed_flag, FloatRMat::m, max_edge_found_macro_confidence, max_edge_found_micro_confidence, max_edge_search_angle, max_free_path_confidence, max_heading_confidence, max_no_edge_found_confidence, max_obstacle_confidence, max_position_confidence, median_depth_in_front, median_depth_to_point(), median_kernel16bit, MOVE_TO_EDGE, MOVE_TO_GOAL, no_edge_found_confidence, number_of_states, obstacle_confidence, position_confidence, POSITION_EDGE, POSITION_GOAL, previous_mode, previous_state, FloatEulers::psi, Rcr, Rrwned, Rwnedwenu, save_image_gray(), save_image_HM(), save_images_flag, set_state(), stateGetNedToBodyEulers_f(), stateGetNedToBodyRMat_f(), stateGetPositionNed_f(), threshold_depth_of_edges, threshold_distance_to_angle, threshold_distance_to_goal, threshold_distance_to_goal_direct, threshold_median_depth, time, time_state, Va_to_Vb(), Vb_to_Va(), VCr, VDISTANCEPOSITIONwned, VEDGECOORDINATESc, VEDGECOORDINATESr, VEDGECOORDINATESwenu, VEDGECOORDINATESwned, VGOALc, VGOALr, VGOALwned, VHOLDINGPOINTwned, VNEDwenu, VPBESTEDGECOORDINATESwned, VRwned, WEDGEBUG_START, FloatVect3::x, NedCoor_f::x, FloatVect3::y, NedCoor_f::y, FloatVect3::z, and NedCoor_f::z.
Here is the call graph for this function:
|
extern |
Number of disparity levels (0-this number)
Definition at line 256 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
|
extern |
Variable to hold distance from robot to edge to goal (used in EDGE_SCAN (9) state)
Definition at line 266 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), wedgebug_init(), and wedgebug_periodic().
|
extern |
Width of kernel for the median kernel.
Definition at line 113 of file wedgebug.c.
Referenced by wedgebug_init().
|
extern |
SE size for the Sobel operation, to detect edges.
Definition at line 112 of file wedgebug.c.
Referenced by wedgebug_init().
|
extern |
|
extern |
This is the max confidence that edges (micro-see above) were found.
Definition at line 166 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
This is the max confidence that a specific heading was reached.
Definition at line 165 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
This is the max confidence that an obstacle was spotted.
Definition at line 162 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
This is the max confidence that a specific position was reached.
Definition at line 164 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
This is the max confidence that edges (macro-see above were found.
Definition at line 167 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
This is the confidence that no edge was found.
Definition at line 161 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
This is the max confidence that an obstacle was not spotted.
Definition at line 163 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
Block size used for the block matching (SBM) function.
Definition at line 257 of file wedgebug.c.
Referenced by CN_escape_velocity(), CN_potential_heading(), CN_potential_velocity(), CN_vector_escape_velocity(), and CN_vector_velocity().
|
extern |
Variable that saves previous mode to control the drone, for some memory.
Definition at line 255 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
|
extern |
Set to 1 if control mode of drone is changed, 0 otherwise.
Definition at line 180 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
SE size for the opening operation.
Definition at line 107 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
|
extern |
SE size for the closing operation.
Definition at line 108 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
|
extern |
SE size for the first dilation operation.
Definition at line 109 of file wedgebug.c.
Referenced by wedgebug_init().
|
extern |
SE size for the second dilation operation (see state 3 "WEDGEBUG_START" and state 6 "POSITION_EDGE" )
Definition at line 110 of file wedgebug.c.
Referenced by background_processes_16bit(), and wedgebug_init().
|
extern |
Definition at line 106 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
|
extern |
Below this median depth (cm), an obstacle is considered to block the way (i.e. the blocking obstacle needs to be close)
Below this median depth (cm), an obstacle is considered to block the way (i.e. the blocking obstacle needs to be close)
Definition at line 150 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
Below this distance (in meters) it is considered that the robot has reached the goal.
Definition at line 146 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
Above this disparity edges are eligible for WedgeBug algorithm (i.e. edges cannot be very far away)
Definition at line 145 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().
|
extern |
Below this depth (cm) edges are eligible for the WedgeBug algorith.
Below this depth (cm) edges are eligible for the WedgeBug algorith.
Definition at line 142 of file wedgebug.c.
Referenced by background_processes(), background_processes_16bit(), and wedgebug_init().
|
extern |
Below this distance (in meters) it is considered that the robot has reached the goal, in DIRECT_CONTROL mode.
Definition at line 149 of file wedgebug.c.
Referenced by wedgebug_init(), and wedgebug_periodic().