|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Motor Mixing. More...
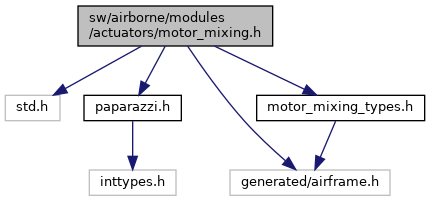
#include "std.h"#include "paparazzi.h"#include "generated/airframe.h"#include "motor_mixing_types.h" Include dependency graph for motor_mixing.h: This graph shows which files directly or indirectly include this file:
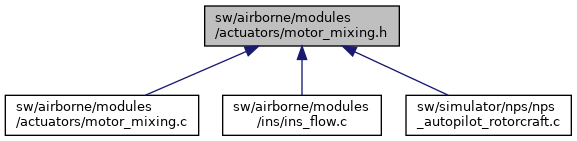
Include dependency graph for motor_mixing.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | MotorMixing |
Functions | |
| void | motor_mixing_init (void) |
| void | motor_mixing_run (bool motors_on, bool override_on, pprz_t in_cmd[]) |
| void | motor_mixing_run_spinup (uint32_t counter, uint32_t max_counter) |
Variables | |
| struct MotorMixing | motor_mixing |
Motor Mixing.
Handles the mapping of roll/pitch/yaw commands to actual motor commands.
Definition in file motor_mixing.h.
| struct MotorMixing |
Definition at line 36 of file motor_mixing.h.
| Data Fields | ||
|---|---|---|
| int32_t | commands[MOTOR_MIXING_NB_MOTOR] | |
| uint32_t | nb_failure | |
| uint32_t | nb_saturation | |
| bool | override_enabled[MOTOR_MIXING_NB_MOTOR] | |
| int32_t | override_value[MOTOR_MIXING_NB_MOTOR] | |
| int32_t | trim[MOTOR_MIXING_NB_MOTOR] | |
Definition at line 109 of file motor_mixing.c.
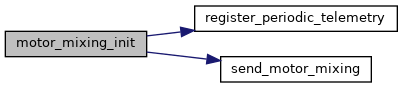
References MotorMixing::commands, DefaultPeriodic, foo, motor_mixing, MOTOR_MIXING_NB_MOTOR, MOTOR_MIXING_STOP_MOTOR, MOTOR_MIXING_TRIM_PITCH, MOTOR_MIXING_TRIM_ROLL, MOTOR_MIXING_TRIM_YAW, MotorMixing::nb_failure, MotorMixing::nb_saturation, MotorMixing::override_enabled, MotorMixing::override_value, pitch_coef, register_periodic_telemetry(), roll_coef, send_motor_mixing(), MotorMixing::trim, and yaw_coef.
Here is the call graph for this function:Definition at line 193 of file motor_mixing.c.
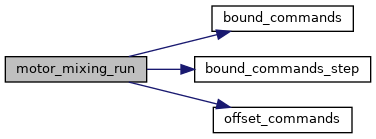
References bound_commands(), bound_commands_step(), MotorMixing::commands, FALSE, foo, INT32_MAX, INT32_MIN, MAX_PPRZ, motor_mixing, MOTOR_MIXING_MAX_MOTOR, MOTOR_MIXING_MAX_SATURATION_OFFSET, MOTOR_MIXING_MIN_MOTOR, MOTOR_MIXING_NB_MOTOR, MOTOR_MIXING_SCALE, MOTOR_MIXING_STOP_MOTOR, MotorMixing::nb_failure, MotorMixing::nb_saturation, offset_commands(), MotorMixing::override_enabled, MotorMixing::override_value, pitch_coef, roll_coef, thrust_coef, MotorMixing::trim, and yaw_coef.
Here is the call graph for this function:Definition at line 168 of file motor_mixing.c.
References MotorMixing::commands, counter, foo, motor_mixing, MOTOR_MIXING_MIN_MOTOR, MOTOR_MIXING_MIN_MOTOR_STARTUP, and MOTOR_MIXING_NB_MOTOR.
|
extern |
Definition at line 94 of file motor_mixing.c.
Referenced by actuators_hitl_periodic(), bound_commands(), bound_commands_step(), motor_mixing_init(), motor_mixing_run(), motor_mixing_run_spinup(), nps_autopilot_run_step(), offset_commands(), send_motor_mixing(), and send_status().