|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Integrated Navigation System interface. More...
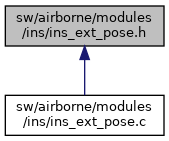
#include "std.h"#include "generated/airframe.h"#include <stdio.h> Include dependency graph for ins_ext_pose.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for ins_ext_pose.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Enumerations | |
| enum | ins_ext_pose_state { EKF_X_POS_X , EKF_X_POS_Y , EKF_X_POS_Z , EKF_X_VEL_X , EKF_X_VEL_Y , EKF_X_VEL_Z , EKF_X_PHI , EKF_X_THETA , EKF_X_PSI , EKF_X_A_BIAS_X , EKF_X_A_BIAS_Y , EKF_X_A_BIAS_Z , EKF_X_G_BIAS_P , EKF_X_G_BIAS_Q , EKF_X_G_BIAS_R , EKF_NUM_STATES } |
| enum | ins_ext_pose_inputs { EKF_U_ACC_X , EKF_U_ACC_Y , EKF_U_ACC_Z , EKF_U_GYRO_P , EKF_U_GYRO_Q , EKF_U_GYRO_R , EKF_NUM_INPUTS } |
| enum | ins_ext_pose_outputs { EKF_Z_POS_X , EKF_Z_POS_Y , EKF_Z_POS_Z , EKF_Z_PHI , EKF_Z_THETA , EKF_Z_PSI , EKF_NUM_OUTPUTS } |
Functions | |
| void | ins_ext_pose_init (void) |
| Module. | |
| void | ins_ext_pose_run (void) |
| void | ins_ext_pose_msg_update (uint8_t *buf) |
| Import External Pose Message. | |
| void | ins_ext_pose_log_header (FILE *file) |
| Logging. | |
| void | ins_ext_pose_log_data (FILE *file) |
Variables | |
| float | ekf_X [EKF_NUM_STATES] |
Integrated Navigation System interface.
Definition in file ins_ext_pose.h.
| Enumerator | |
|---|---|
| EKF_U_ACC_X | |
| EKF_U_ACC_Y | |
| EKF_U_ACC_Z | |
| EKF_U_GYRO_P | |
| EKF_U_GYRO_Q | |
| EKF_U_GYRO_R | |
| EKF_NUM_INPUTS | |
Definition at line 58 of file ins_ext_pose.h.
| Enumerator | |
|---|---|
| EKF_Z_POS_X | |
| EKF_Z_POS_Y | |
| EKF_Z_POS_Z | |
| EKF_Z_PHI | |
| EKF_Z_THETA | |
| EKF_Z_PSI | |
| EKF_NUM_OUTPUTS | |
Definition at line 68 of file ins_ext_pose.h.
Definition at line 39 of file ins_ext_pose.h.
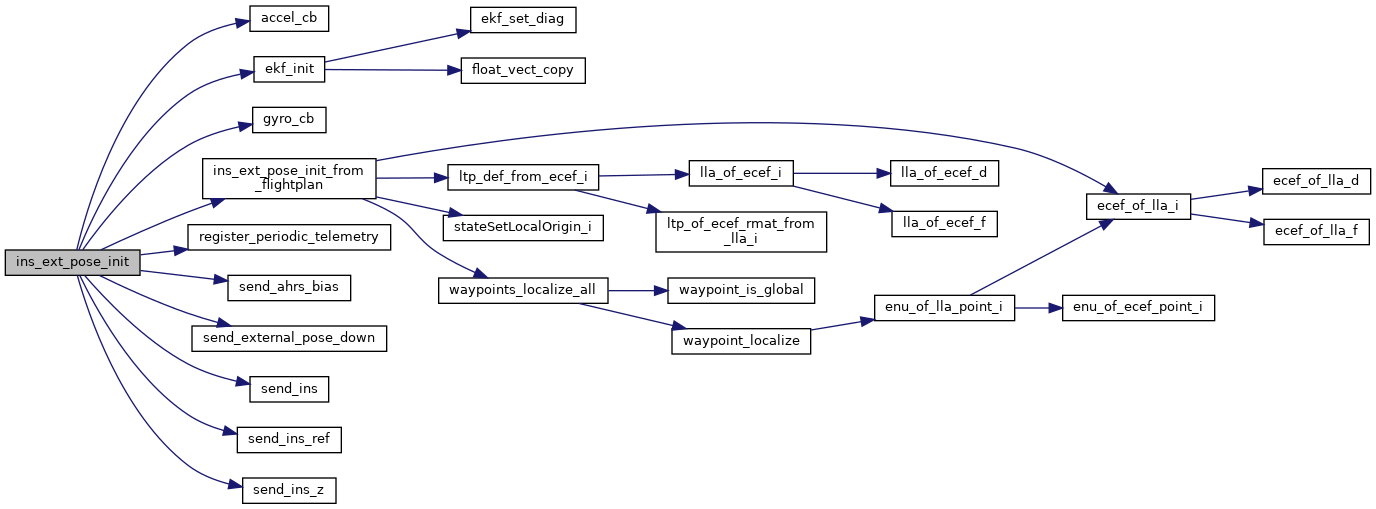
Module.
Definition at line 283 of file ins_ext_pose.c.
References accel_cb(), accel_ev, DefaultPeriodic, ekf_init(), foo, gyro_cb(), gyro_ev, InsExtPose::has_new_acc, InsExtPose::has_new_ext_pose, InsExtPose::has_new_gyro, ins_ext_pose, INS_EXT_POSE_IMU_ID, ins_ext_pose_init_from_flightplan(), register_periodic_telemetry(), send_ahrs_bias(), send_external_pose_down(), send_filter_status(), send_ins(), send_ins_ref(), send_ins_z(), and InsExtPose::started.
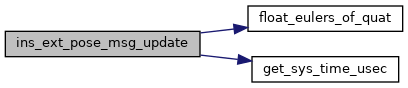
Here is the call graph for this function:Import External Pose Message.
Definition at line 226 of file ins_ext_pose.c.
References DEBUG_PRINT, ENU_OF_TO_NED, EULERS_COPY, InsExtPose::ev_att, InsExtPose::ev_pos, InsExtPose::ev_quat, InsExtPose::ev_time, InsExtPose::ev_vel, float_eulers_of_quat(), float_quat_comp(), foo, get_sys_time_usec(), InsExtPose::has_new_ext_pose, ins_ext_pose, FloatEulers::phi, FloatEulers::psi, FloatQuat::qi, QUAT_COPY, FloatQuat::qx, FloatQuat::qy, FloatQuat::qz, FloatEulers::theta, and EnuCoor_f::x.
Here is the call graph for this function:Definition at line 314 of file ins_ext_pose.c.
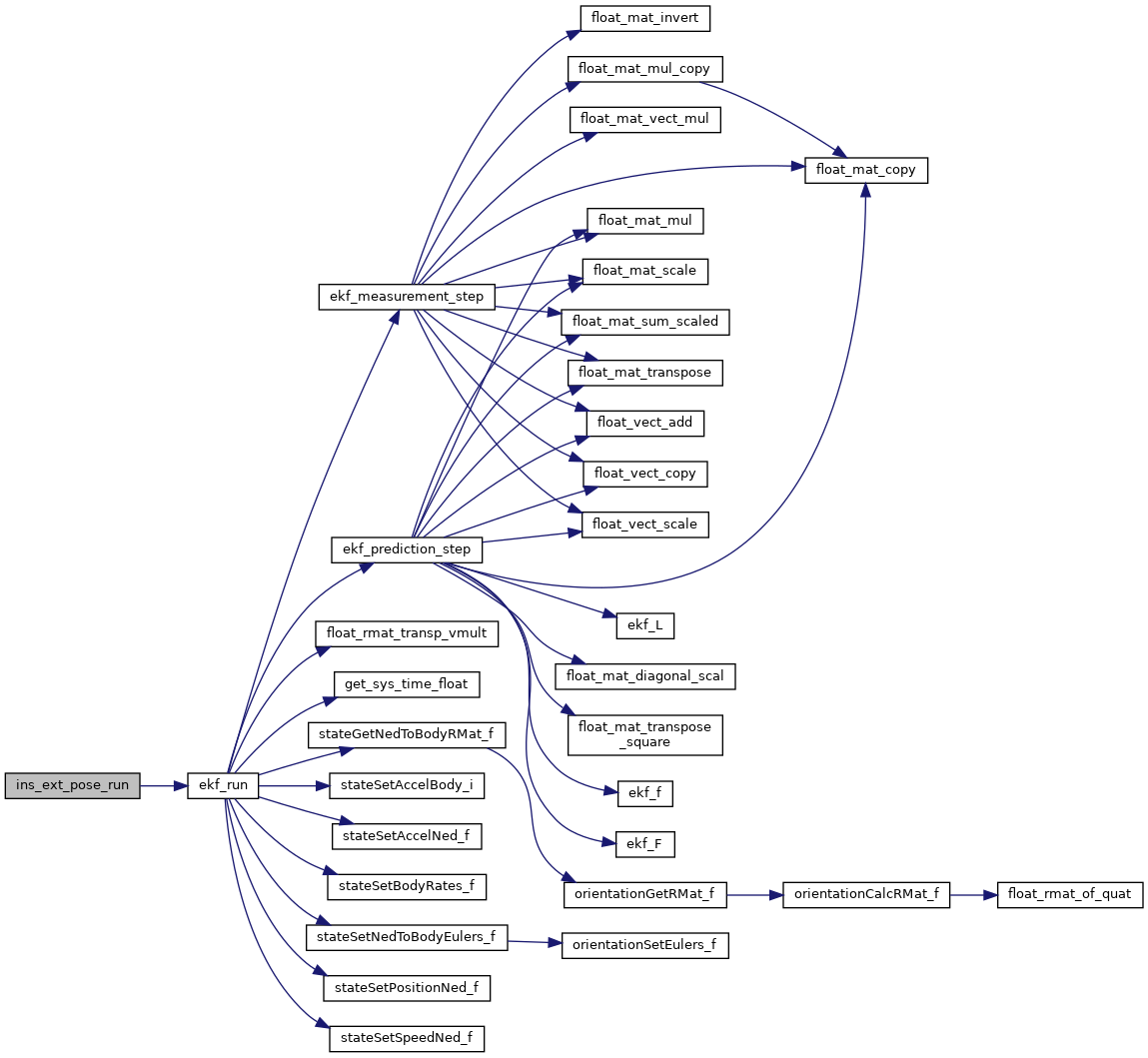
References ekf_run().
Here is the call graph for this function:
|
extern |
Definition at line 340 of file ins_ext_pose.c.
Referenced by ekf_init(), ekf_measurement_step(), ekf_prediction_step(), ekf_run(), ins_ext_pose_log_data(), and send_ahrs_bias().