|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
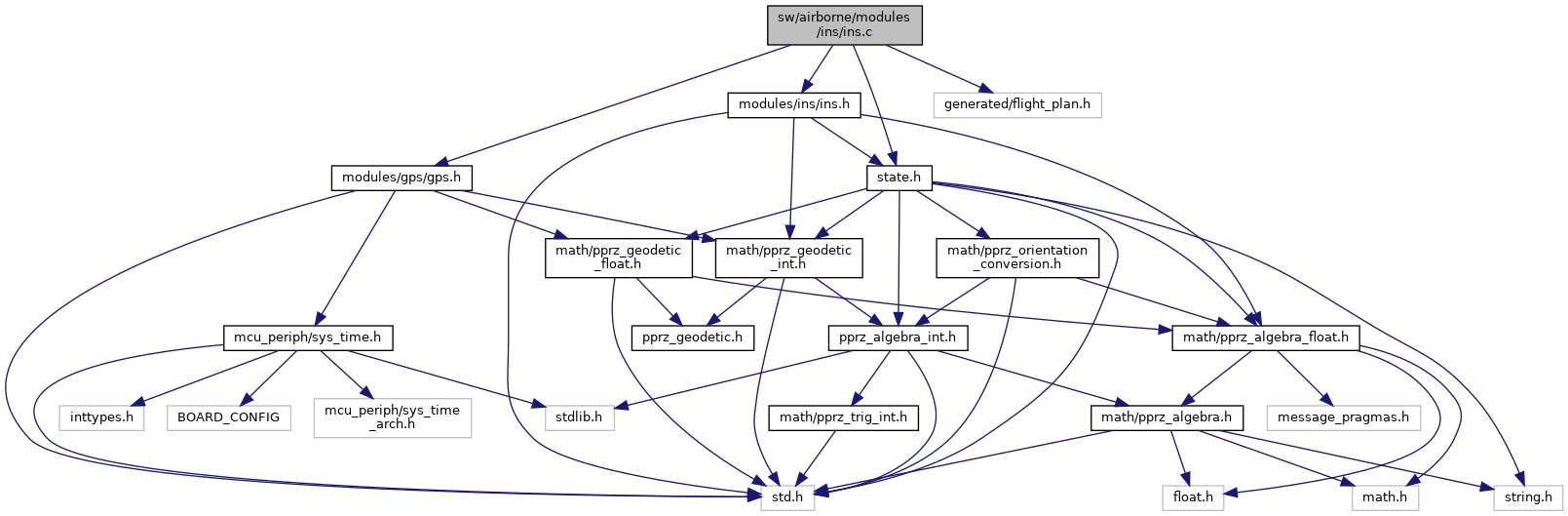
Integrated Navigation System interface. More...
 Include dependency graph for ins.c:
Include dependency graph for ins.c:Go to the source code of this file.
Functions | |
| void | ins_init_origin_i_from_flightplan (uint16_t id, struct LtpDef_i *ltp_def) |
| initialize the local origin (ltp_def in fixed point) from flight plan position | |
Integrated Navigation System interface.
Definition in file ins.c.
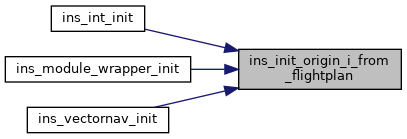
initialize the local origin (ltp_def in fixed point) from flight plan position
Definition at line 33 of file ins.c.
References foo, LtpDef_i::hmsl, LlaCoor_i::lat, ltp_def, ltp_def_from_lla_i(), and stateSetLocalOrigin_i().
Referenced by ins_int_init(), ins_module_wrapper_init(), and ins_vectornav_init().
Here is the call graph for this function: Here is the caller graph for this function: