|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

#include <math.h>#include "std.h"#include "gvf.h"#include "autopilot.h"#include "modules/datalink/telemetry.h" Include dependency graph for gvf.c:
Include dependency graph for gvf.c:Go to the source code of this file.
Functions | |
| static void | send_gvf (struct transport_tx *trans, struct link_device *dev) |
| TELEMETRY -----------------------------------------------------------—. | |
| void | gvf_init (void) |
| EXTERN FUNCTIONS ----------------------------------------------------—. | |
| void | gvf_control_2D (float ke, float kn, float e, struct gvf_grad *grad, struct gvf_Hess *hess) |
| void | gvf_set_direction (int8_t s) |
| void | gvf_set_speed (float speed) |
| void | gvf_set_align (bool align) |
Variables | |
| gvf_con | gvf_control |
| gvf_tel | gvf_telemetry = {0} |
| static uint32_t | gvf_t0 = 0 |
Definition at line 100 of file gvf.c.
References RotorcraftNavigation::accel, gvf_con::align, gvf_common_state::course, course, gvf_con::error_n, foo, get_sys_time_msec(), gvf_c_info, gvf_c_state, gvf_control, gvf_low_level_control_2D(), gvf_low_level_getState(), gvf_t0, gvf_telemetry, RotorcraftNavigation::heading, gvf_common_info::kappa, gvf_tel::n_norm, nav, NAV_SETPOINT_MODE_SPEED, gvf_tel::omega, gvf_tel::omega_d, gvf_common_info::ori_err, gvf_common_state::px_dot, gvf_common_state::py_dot, gvf_con::s, s, RotorcraftNavigation::setpoint_mode, RotorcraftNavigation::speed, gvf_con::speed, gvf_tel::t_norm, EnuCoor_f::x, and EnuCoor_f::y.
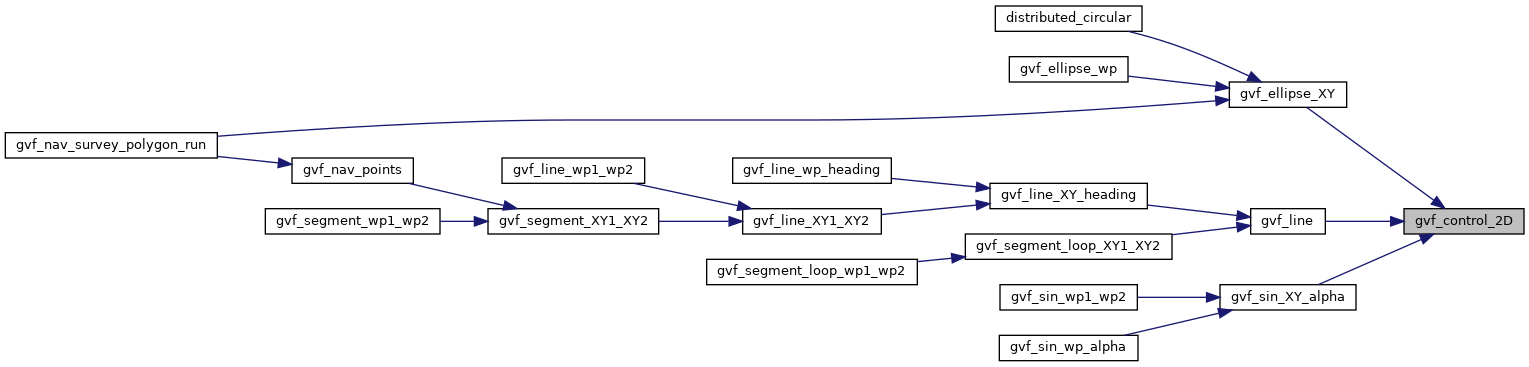
Referenced by gvf_line(), nav_gvf_ellipse_XY(), and nav_gvf_sin_XY_alpha().
Here is the call graph for this function: Here is the caller graph for this function:EXTERN FUNCTIONS ----------------------------------------------------—.
Definition at line 85 of file gvf.c.
References gvf_con::align, DefaultPeriodic, foo, gvf_control, gvf_trajectory, gvf_con::ke, gvf_con::kn, NONE, register_periodic_telemetry(), gvf_con::s, send_gvf(), gvf_con::speed, and gvf_tra::type.
Here is the call graph for this function:Definition at line 245 of file gvf.c.
References gvf_con::align, and gvf_control.
Definition at line 232 of file gvf.c.
References gvf_control, gvf_con::s, and s.
Referenced by gvf_circle_direction(), nav_gvf_line_XY_heading(), and nav_gvf_segment_loop_XY1_XY2().
Here is the caller graph for this function:Definition at line 239 of file gvf.c.
References gvf_control, and gvf_con::speed.
|
static |
TELEMETRY -----------------------------------------------------------—.
Definition at line 42 of file gvf.c.
References dev, ELLIPSE, gvf_con::error, gvf_con::error_n, foo, get_sys_time_msec(), gvf_control, gvf_segment, gvf_t0, gvf_telemetry, gvf_trajectory, gvf_con::ke, LINE, gvf_tel::n_norm, gvf_tel::omega, gvf_tel::omega_d, gvf_tra::p, gvf_tra::p_len, gvf_con::s, gvf_seg::seg, gvf_tel::t_norm, gvf_tra::type, gvf_seg::x1, gvf_seg::x2, gvf_seg::y1, and gvf_seg::y2.
Referenced by gvf_init().
Here is the call graph for this function: Here is the caller graph for this function:| gvf_con gvf_control |
Definition at line 30 of file gvf.c.
Referenced by distributed_circular(), gvf_control_2D(), gvf_init(), gvf_line(), gvf_set_align(), gvf_set_direction(), gvf_set_speed(), nav_gvf_ellipse_XY(), nav_gvf_sin_XY_alpha(), and send_gvf().
|
static |
Definition at line 36 of file gvf.c.
Referenced by gvf_control_2D(), and send_gvf().
| gvf_tel gvf_telemetry = {0} |
Definition at line 33 of file gvf.c.
Referenced by gvf_control_2D(), and send_gvf().