|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

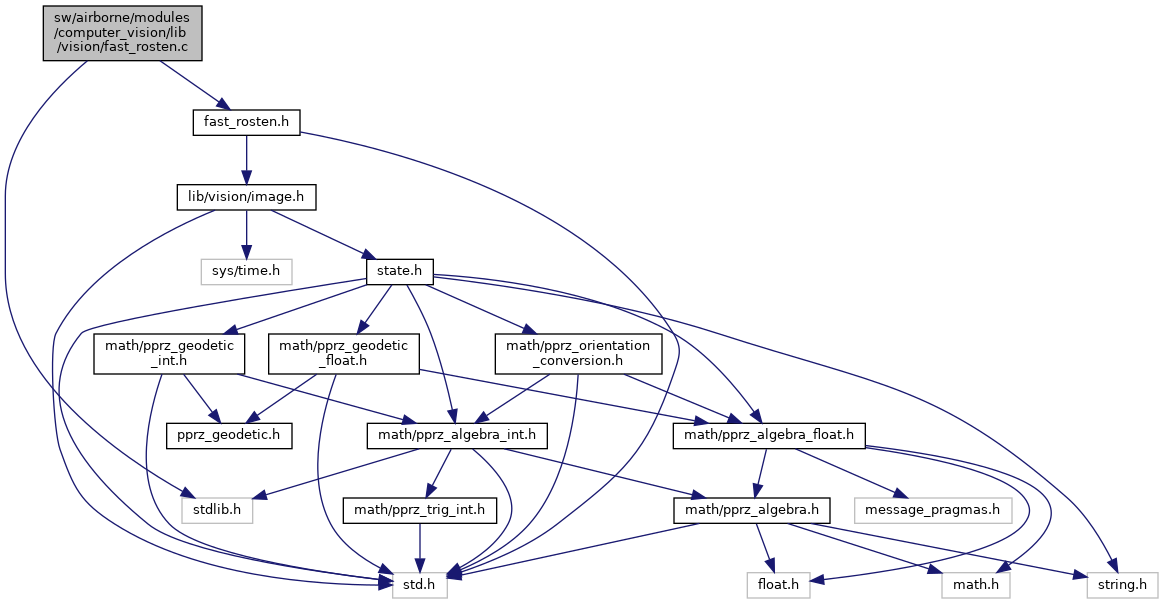
 Include dependency graph for fast_rosten.c:
Include dependency graph for fast_rosten.c:Go to the source code of this file.
Functions | |
| static void | fast_make_offsets (int32_t *pixel, uint16_t row_stride, uint8_t pixel_size) |
| Make offsets for FAST9 calculation. | |
| void | fast9_detect (struct image_t *img, uint8_t threshold, uint16_t min_dist, uint16_t x_padding, uint16_t y_padding, uint16_t *num_corners, uint16_t *ret_corners_length, struct point_t **ret_corners, uint16_t *roi) |
| Do a FAST9 corner detection. | |
| int | fast9_detect_pixel (struct image_t *img, uint8_t threshold, uint16_t x, uint16_t y) |
| Do a FAST9 corner detection for a single pixel. | |
| void fast9_detect | ( | struct image_t * | img, |
| uint8_t | threshold, | ||
| uint16_t | min_dist, | ||
| uint16_t | x_padding, | ||
| uint16_t | y_padding, | ||
| uint16_t * | num_corners, | ||
| uint16_t * | ret_corners_length, | ||
| struct point_t ** | ret_corners, | ||
| uint16_t * | roi | ||
| ) |
Do a FAST9 corner detection.
The array *ret_corners can be reallocated in this function every time it becomes too full, *ret_corners_length is updated appropriately.
| [in] | *img | The image to do the corner detection on |
| [in] | threshold | The threshold which we use for FAST9 |
| [in] | min_dist | The minimum distance in pixels between detections |
| [in] | x_padding | The padding in the x direction to not scan for corners |
| [in] | y_padding | The padding in the y direction to not scan for corners |
| [in] | *num_corners | reference to the amount of corners found, set by this function |
| [in] | *ret_corners_length | the length of the array *ret_corners. |
| [in] | **ret_corners | pointer to the array which contains the corners that were detected. |
| [in] | *roi | array of format [x0 y0 x1 y1] describing the region of interest in the image where the corners will be detected. If null, the whole image is used. |
Definition at line 52 of file fast_rosten.c.
References fast_make_offsets(), foo, IMAGE_YUV422, and p.
Referenced by calc_fast9_lukas_kanade(), and manage_flow_features().
Here is the call graph for this function: Here is the caller graph for this function:Do a FAST9 corner detection for a single pixel.
Returns 0 when not a corner, and 1 when a corner.
| [in] | *img | The image to do the corner detection on |
| [in] | threshold | The threshold which we use for FAST9 |
| [in] | x,the | x-coordinate of the pixel |
| [in] | y,the | y-coordinate of the pixel |
Definition at line 3709 of file fast_rosten.c.
References fast_make_offsets(), foo, IMAGE_YUV422, and p.
Referenced by act_fast().
Here is the call graph for this function: Here is the caller graph for this function:Make offsets for FAST9 calculation.
| [out] | *pixel | The offset array of the different pixels |
| [in] | row_stride | The row stride in the image |
Definition at line 3681 of file fast_rosten.c.
References foo.
Referenced by fast9_detect(), and fast9_detect_pixel().
Here is the caller graph for this function: