|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
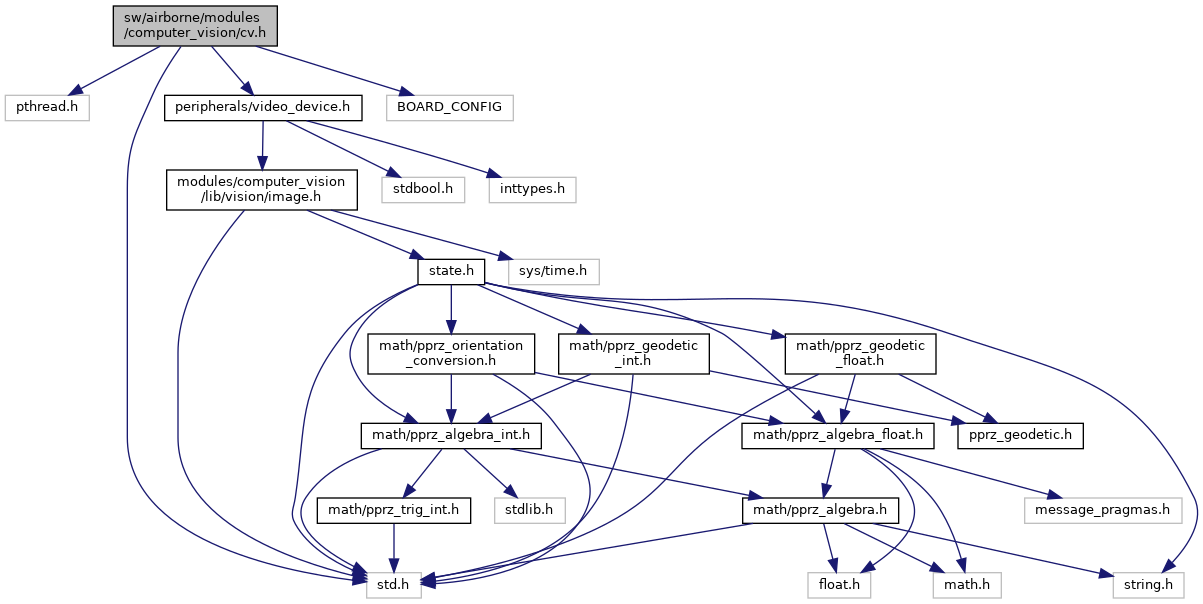
Computer vision framework for onboard processing. More...
 Include dependency graph for cv.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for cv.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | cv_async |
| struct | video_listener |
Typedefs | |
| typedef struct image_t *(* | cv_function) (struct image_t *img, uint8_t camera_id) |
Functions | |
| bool | add_video_device (struct video_config_t *device) |
| Keep track of video devices added by modules. | |
| struct video_listener * | cv_add_to_device (struct video_config_t *device, cv_function func, uint16_t fps, uint8_t id) |
| struct video_listener * | cv_add_to_device_async (struct video_config_t *device, cv_function func, int nice_level, uint16_t fps, uint8_t id) |
| void | cv_run_device (struct video_config_t *device, struct image_t *img) |
Computer vision framework for onboard processing.
Definition in file cv.h.
| struct cv_async |
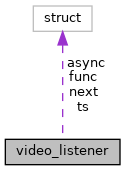
| struct video_listener |
Collaboration diagram for video_listener:| Data Fields | ||
|---|---|---|
| volatile bool | active | |
| struct cv_async * | async | |
| cv_function | func | |
| uint8_t | id | |
| uint16_t | maximum_fps | |
| struct video_listener * | next | |
| struct timeval | ts | |
|
extern |
Keep track of video devices added by modules.
Definition at line 197 of file video_thread.c.
References cameras, cameras, video_config_t::dev_name, foo, initialize_camera(), printf_debug, and VIDEO_THREAD_MAX_CAMERAS.
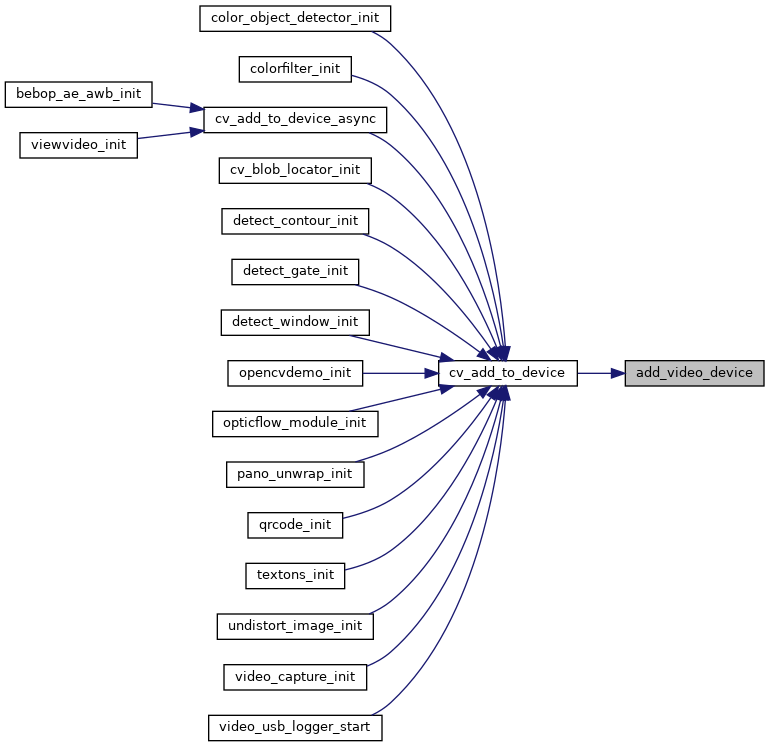
Referenced by cv_add_to_device().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 46 of file cv.c.
References add_video_device(), video_config_t::cv_listener, foo, video_listener::func, video_listener::id, listener, and video_listener::next.
Referenced by color_object_detector_init(), colorfilter_init(), cv_add_to_device_async(), cv_blob_locator_init(), detect_contour_init(), detect_gate_init(), detect_window_init(), opencvdemo_init(), opticflow_module_init(), pano_unwrap_init(), qrcode_init(), textons_init(), undistort_image_init(), video_capture_init(), video_usb_logger_start(), and wedgebug_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 83 of file cv.c.
References video_listener::async, image_t::buf, image_t::buf_size, cv_add_to_device(), cv_async_thread(), foo, video_listener::func, cv_async::img_available, cv_async::img_copy, cv_async::img_mutex, listener, cv_async::thread_id, and cv_async::thread_priority.
Referenced by bebop_ae_awb_init(), and viewvideo_init().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 178 of file cv.c.
References video_listener::active, video_listener::async, cv_async_function(), video_config_t::cv_listener, foo, video_listener::func, video_listener::id, listener, video_listener::maximum_fps, video_listener::next, timeval_diff(), and video_listener::ts.
Referenced by video_thread_function().
Here is the call graph for this function: Here is the caller graph for this function: