|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
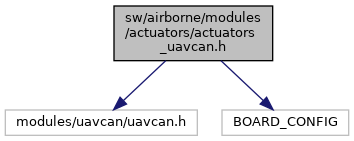
#include "modules/uavcan/uavcan.h"#include <BOARD_CONFIG> Include dependency graph for actuators_uavcan.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for actuators_uavcan.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Macros | |
| #define | ACTUATORS_UAVCAN_RAW_DIV 1 |
| #define | ACTUATORS_UAVCAN_CMD_DIV 1 |
Functions | |
| void | actuators_uavcan_init (struct uavcan_iface_t *iface) |
| Initialize an uavcan interface. | |
| void | actuators_uavcan_commit (struct uavcan_iface_t *iface, int16_t *values, uint8_t nb) |
| Commit actuator values to the uavcan interface (EQUIPMENT_ESC_RAWCOMMAND) | |
| void | actuators_uavcan_cmd_commit (struct uavcan_iface_t *iface, int16_t *values, uint8_t nb) |
| Commit actuator values to the uavcan interface (EQUIPMENT_ACTUATOR_ARRAYCOMMAND) | |
| #define ACTUATORS_UAVCAN_CMD_DIV 1 |
Definition at line 36 of file actuators_uavcan.h.
| #define ACTUATORS_UAVCAN_RAW_DIV 1 |
Definition at line 31 of file actuators_uavcan.h.
|
extern |
Commit actuator values to the uavcan interface (EQUIPMENT_ACTUATOR_ARRAYCOMMAND)
Definition at line 409 of file actuators_uavcan.c.
References foo, MAX_PPRZ, MIN_PPRZ, msg, uavcan_broadcast(), and UAVCAN_CMD_UNUSED.
Here is the call graph for this function:
|
extern |
Commit actuator values to the uavcan interface (EQUIPMENT_ESC_RAWCOMMAND)
Definition at line 388 of file actuators_uavcan.c.
References foo, msg, and uavcan_broadcast().
Here is the call graph for this function:
|
extern |
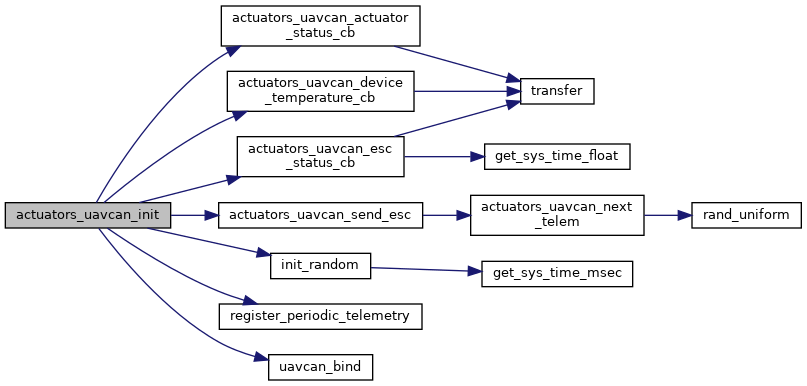
Initialize an uavcan interface.
Definition at line 348 of file actuators_uavcan.c.
References actuator_status_ev, actuators_uavcan1cmd_values, actuators_uavcan2cmd_values, actuators_uavcan_actuator_status_cb(), actuators_uavcan_device_temperature_cb(), actuators_uavcan_esc_status_cb(), actuators_uavcan_initialized, actuators_uavcan_send_esc(), DefaultPeriodic, device_temperature_ev, esc_status_ev, foo, init_random(), register_periodic_telemetry(), uavcan_bind(), and UAVCAN_CMD_UNUSED.
Here is the call graph for this function: