|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Basic guidance for rover. More...
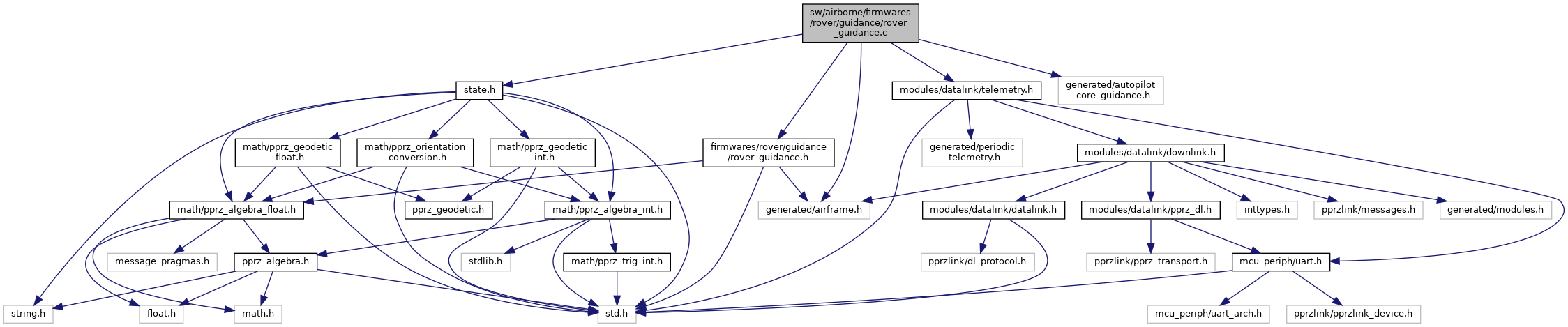
#include "firmwares/rover/guidance/rover_guidance.h"#include "generated/airframe.h"#include "generated/autopilot_core_guidance.h"#include "state.h"#include "modules/datalink/telemetry.h" Include dependency graph for rover_guidance.c:
Include dependency graph for rover_guidance.c:Go to the source code of this file.
Macros | |
| #define | AUTOPILOT_CORE_GUIDANCE_C |
| #define | MAX_POS_ERR 10.f |
| #define | MAX_SPEED_ERR 10.f |
| #define | MAX_INTEGRAL_CMD (MAX_PPRZ / 10.f) |
| #define | PROXIMITY_DIST 0.5f |
Functions | |
| void | rover_guidance_init (void) |
| void | rover_guidance_periodic (void) |
| static float | compute_pid (struct RoverGuidancePID *pid) |
| void | rover_guidance_run (float *heading_sp) |
| void | rover_guidance_enter (void) |
| void | rover_guidance_set_speed_igain (uint32_t igain) |
| void | rover_guidance_set_turn_igain (uint32_t igain) |
Variables | |
| struct RoverGuidance | rover_guidance |
Basic guidance for rover.
Implement standard PID control loop to track a navigation target. Guidance "modes" are using the autopilot generation with the "guidance" state machine.
Definition in file rover_guidance.c.
| #define AUTOPILOT_CORE_GUIDANCE_C |
Definition at line 28 of file rover_guidance.c.
Definition at line 80 of file rover_guidance.c.
Definition at line 78 of file rover_guidance.c.
Definition at line 79 of file rover_guidance.c.
Definition at line 81 of file rover_guidance.c.
|
static |
Definition at line 73 of file rover_guidance.c.
References RoverGuidancePID::d, RoverGuidancePID::d_err, RoverGuidancePID::err, RoverGuidancePID::i, RoverGuidancePID::p, and RoverGuidancePID::sum_err.
Referenced by rover_guidance_run().
Here is the caller graph for this function:Definition at line 124 of file rover_guidance.c.
References foo, RoverGuidanceSetpoint::heading, RoverGuidanceSetpoint::mask, FloatEulers::psi, rover_guidance, RoverGuidance::sp, and stateGetNedToBodyEulers_f().
Here is the call graph for this function:Definition at line 42 of file rover_guidance.c.
References RoverGuidancePID::d, RoverGuidancePID::d_err, RoverGuidancePID::err, FLOAT_VECT2_ZERO, foo, RoverGuidanceSetpoint::heading, RoverGuidancePID::i, RoverGuidancePID::p, RoverGuidanceSetpoint::pos, rover_guidance, RoverGuidance::sp, RoverGuidance::speed_pid, RoverGuidancePID::sum_err, and RoverGuidance::turn_pid.
Definition at line 67 of file rover_guidance.c.
References foo.
Definition at line 83 of file rover_guidance.c.
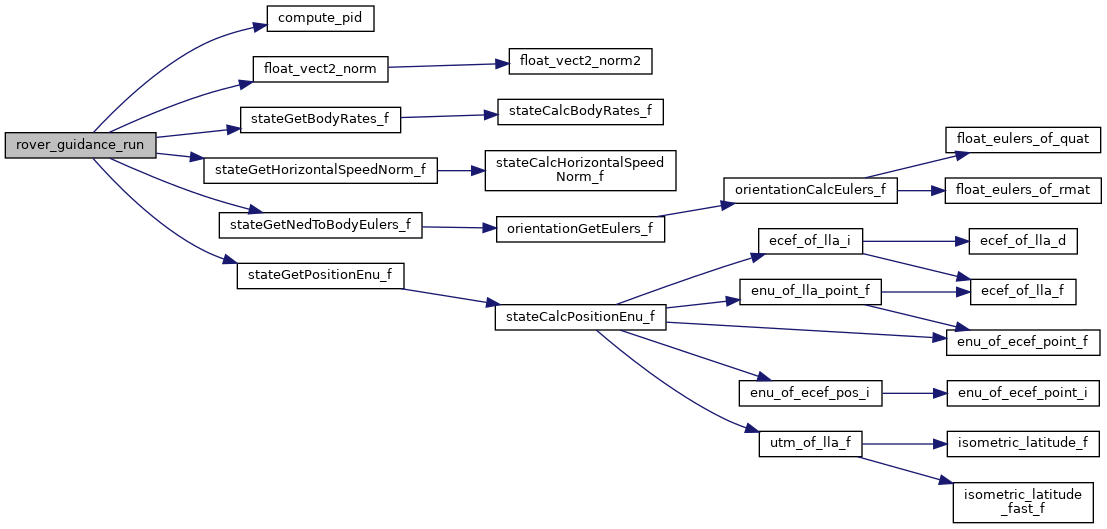
References RoverGuidance::cmd, compute_pid(), RoverGuidancePID::d_err, RoverGuidancePID::err, float_vect2_norm(), foo, RoverGuidanceSetpoint::heading, MAX_POS_ERR, MAX_PPRZ, MAX_SPEED_ERR, RoverGuidanceControl::motor_speed, RoverGuidanceControl::motor_turn, RoverGuidanceSetpoint::pos, PROXIMITY_DIST, FloatEulers::psi, FloatRates::r, rover_guidance, RoverGuidance::sp, RoverGuidance::speed_pid, stateGetBodyRates_f(), stateGetHorizontalSpeedNorm_f(), stateGetNedToBodyEulers_f(), stateGetPositionEnu_f(), RoverGuidancePID::sum_err, TRIM_PPRZ, RoverGuidance::turn_pid, and VECT2_DIFF.
Here is the call graph for this function:Definition at line 169 of file rover_guidance.c.
References RoverGuidancePID::i, rover_guidance, RoverGuidance::speed_pid, and RoverGuidancePID::sum_err.
Definition at line 175 of file rover_guidance.c.
References RoverGuidancePID::i, rover_guidance, RoverGuidancePID::sum_err, and RoverGuidance::turn_pid.
| struct RoverGuidance rover_guidance |
Definition at line 35 of file rover_guidance.c.
Referenced by rover_guidance_enter(), rover_guidance_init(), rover_guidance_run(), rover_guidance_set_speed_igain(), and rover_guidance_set_turn_igain().