|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|

messages parser for mission interface More...
#include "modules/mission/mission_common.h"#include <string.h>#include "generated/flight_plan.h"#include "generated/airframe.h"#include "modules/datalink/datalink.h"#include "modules/datalink/downlink.h"#include "modules/datalink/telemetry.h" Include dependency graph for mission_common.c:
Include dependency graph for mission_common.c:Go to the source code of this file.
Macros | |
| #define | MISSION_CHECK_UNIQUE_ID TRUE |
Variables | |
| struct _mission | mission = { 0 } |
messages parser for mission interface
Definition in file mission_common.c.
Definition at line 40 of file mission_common.c.
| struct _mission_element * mission_get | ( | void | ) |
Get current mission element.
Definition at line 178 of file mission_common.c.
References _mission::current_idx, _mission::elements, foo, _mission::insert_idx, and mission.
Referenced by mission_run(), and mission_run().
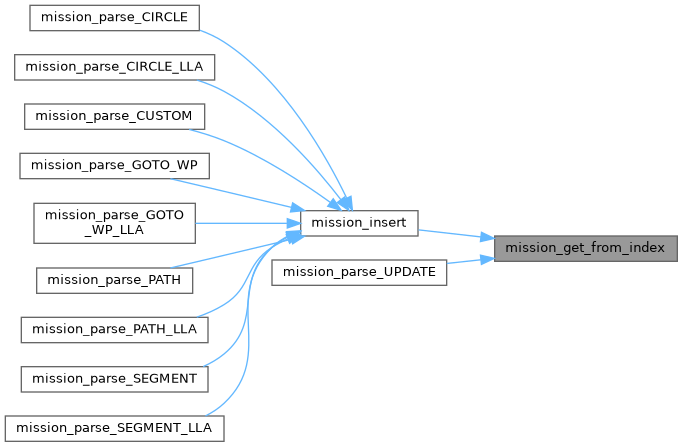
Here is the caller graph for this function:| struct _mission_element * mission_get_from_index | ( | uint8_t | index | ) |
Get mission element by index.
Definition at line 162 of file mission_common.c.
References _mission::current_idx, _mission::elements, foo, _mission_element::index, _mission::insert_idx, mission, and MISSION_ELEMENT_NB.
Referenced by mission_insert(), and mission_parse_UPDATE().
Here is the caller graph for this function:
|
static |
Definition at line 151 of file mission_common.c.
References foo, mission, MISSION_REGISTER_NB, _mission::registered, and _mission_registered::type.
Referenced by mission_parse_CUSTOM().
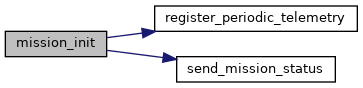
Here is the caller graph for this function:Init mission structure.
Definition at line 65 of file mission_common.c.
References _mission_registered::cb, _mission::current_idx, DefaultPeriodic, _mission::element_time, foo, _mission::insert_idx, mission, MISSION_REGISTER_NB, MISSION_TYPE_SIZE, register_periodic_telemetry(), _mission::registered, send_mission_status(), and _mission_registered::type.
Here is the call graph for this function:| bool mission_insert | ( | enum MissionInsertMode | insert, |
| struct _mission_element * | element | ||
| ) |
Insert a mission element according to the insertion mode.
| insert | insertion mode |
| element | mission element structure |
Definition at line 83 of file mission_common.c.
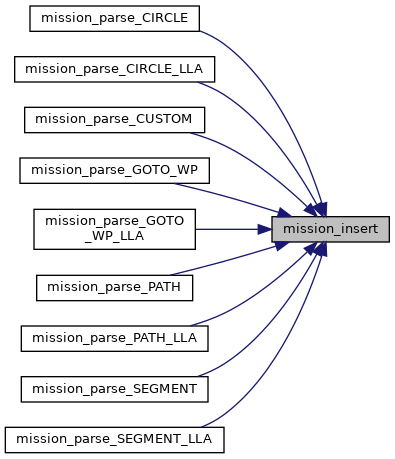
References Append, _mission::current_idx, _mission::element_time, _mission::elements, foo, _mission_element::index, _mission::insert_idx, mission, MISSION_ELEMENT_NB, mission_get_from_index(), Prepend, ReplaceAll, ReplaceCurrent, and ReplaceNexts.
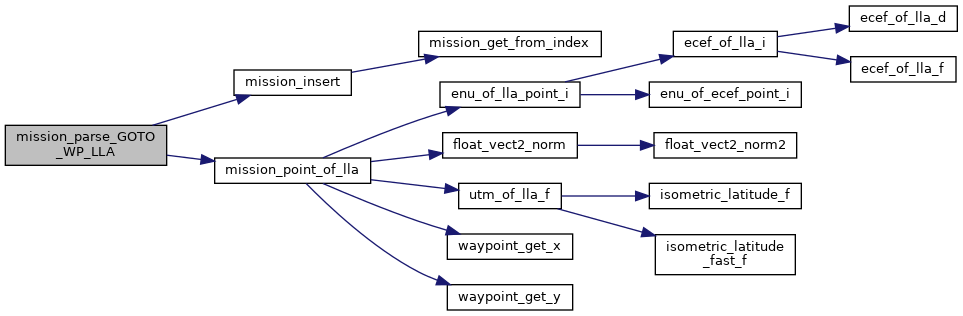
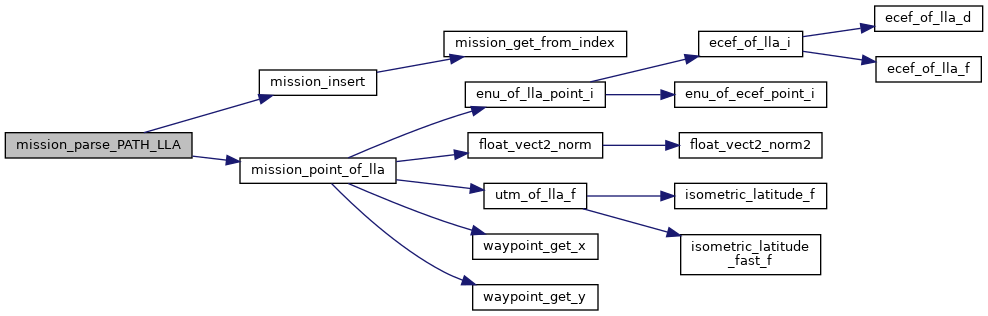
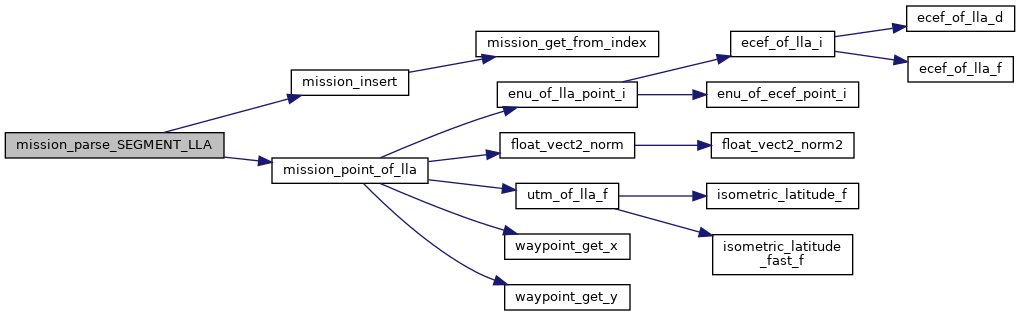
Referenced by mission_parse_CIRCLE(), mission_parse_CIRCLE_LLA(), mission_parse_CUSTOM(), mission_parse_GOTO_WP(), mission_parse_GOTO_WP_LLA(), mission_parse_PATH(), mission_parse_PATH_LLA(), mission_parse_SEGMENT(), and mission_parse_SEGMENT_LLA().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 236 of file mission_common.c.
References foo, mission_insert(), MissionCircle, and _mission_element::type.
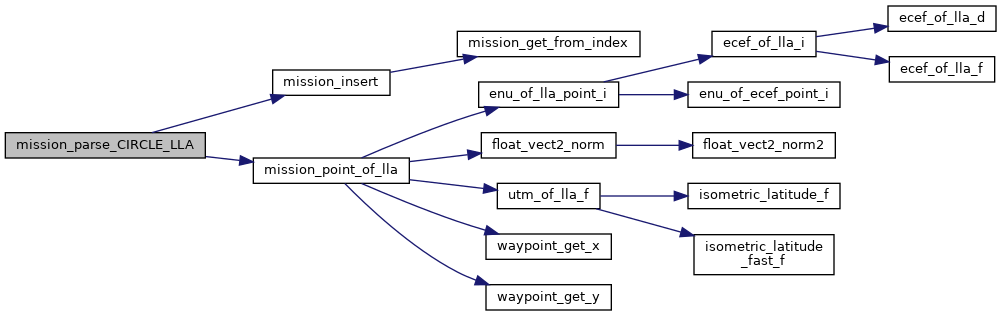
Here is the call graph for this function:Definition at line 254 of file mission_common.c.
References LlaCoor_i::alt, foo, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), mission_point_of_lla(), MissionCircle, and _mission_element::type.
Here is the call graph for this function:Definition at line 392 of file mission_common.c.
References foo, mission_get_registered(), mission_insert(), MissionCustom, and _mission_element::type.
Here is the call graph for this function:Definition at line 474 of file mission_common.c.
References _mission::current_idx, _mission::element_time, foo, _mission::insert_idx, and mission.
Definition at line 446 of file mission_common.c.
References _mission::current_idx, _mission::element_time, foo, mission, and MISSION_ELEMENT_NB.
Parsing functions called when a mission message is received.
Definition at line 198 of file mission_common.c.
References foo, mission_insert(), MissionWP, and _mission_element::type.
Here is the call graph for this function:Definition at line 215 of file mission_common.c.
References LlaCoor_i::alt, foo, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), mission_point_of_lla(), MissionWP, and _mission_element::type.
Here is the call graph for this function:Definition at line 461 of file mission_common.c.
References _mission::current_idx, _mission::element_time, foo, _mission::insert_idx, mission, and MISSION_ELEMENT_NB.
Definition at line 321 of file mission_common.c.
References foo, mission_insert(), MISSION_PATH_NB, MissionPath, and _mission_element::type.
Here is the call graph for this function:Definition at line 353 of file mission_common.c.
References LlaCoor_i::alt, foo, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), MISSION_PATH_NB, mission_point_of_lla(), MissionPath, and _mission_element::type.
Here is the call graph for this function:Definition at line 276 of file mission_common.c.
References foo, mission_insert(), MissionSegment, and _mission_element::type.
Here is the call graph for this function:Definition at line 296 of file mission_common.c.
References foo, LlaCoor_i::lat, mission_insert(), mission_point_of_lla(), MissionSegment, and _mission_element::type.
Here is the call graph for this function:Definition at line 414 of file mission_common.c.
References _mission_element::duration, foo, MISSION_CUSTOM_MAX, mission_get_from_index(), MissionCircle, MissionCustom, MissionPath, MissionSegment, MissionUpdate, and MissionWP.
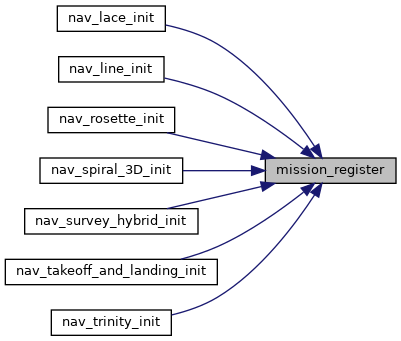
Here is the call graph for this function:| bool mission_register | ( | mission_custom_cb | cb, |
| char * | type | ||
| ) |
Register a new navigation or action callback function.
| cb | callback f(nb, param array) |
| type | string identifier with 5 characters max (+ 1 '\0' char) |
Definition at line 135 of file mission_common.c.
References _mission_registered::cb, foo, mission, MISSION_REGISTER_NB, MISSION_TYPE_SIZE, _mission::registered, and _mission_registered::type.
Referenced by nav_flower_init(), nav_lace_init(), nav_line_init(), nav_poles_init(), nav_rosette_init(), nav_spiral_3D_init(), nav_survey_hybrid_init(), nav_takeoff_and_landing_init(), and nav_trinity_init().
Here is the caller graph for this function:Report mission status.
Send mission status over datalink
Definition at line 188 of file mission_common.c.
References DefaultChannel, DefaultDevice, and send_mission_status().
Here is the call graph for this function:
|
static |
Definition at line 45 of file mission_common.c.
References _mission::current_idx, _mission_element::duration, _mission::element_time, _mission::elements, foo, _mission_element::index, _mission::insert_idx, mission, and MISSION_ELEMENT_NB.
Referenced by mission_init(), and mission_status_report().
Here is the caller graph for this function:| struct _mission mission = { 0 } |
Definition at line 43 of file mission_common.c.
Referenced by mission_get(), mission_get_from_index(), mission_get_registered(), mission_init(), mission_insert(), mission_nav_circle(), mission_parse_END_MISSION(), mission_parse_GOTO_MISSION(), mission_parse_NEXT_MISSION(), mission_register(), mission_run(), mission_run(), and send_mission_status().