|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
mission planner library More...
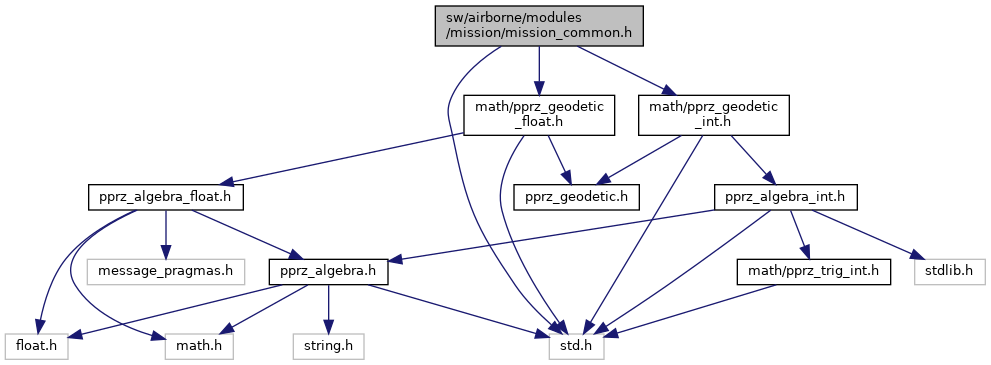
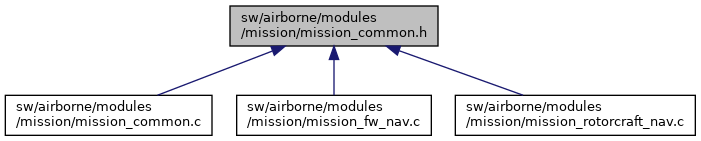
 Include dependency graph for mission_common.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for mission_common.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | _mission_wp |
| struct | _mission_circle |
| struct | _mission_segment |
| struct | _mission_path |
| struct | _mission_registered |
| struct | _mission_custom |
| struct | _mission_element |
| struct | _mission |
| union | _mission_element.element |
Macros | |
| #define | MISSION_PATH_NB 5 |
| #define | MISSION_CUSTOM_MAX 12 |
| #define | MISSION_TYPE_SIZE 6 |
| #define | MISSION_ELEMENT_NB 20 |
| Max number of elements in the tasks' list can be redefined. | |
| #define | MISSION_REGISTER_NB 6 |
| Max number of registered nav/action callbacks can be redefined. | |
Typedefs | |
| typedef bool(* | mission_custom_cb) (uint8_t nb, float *params, enum MissionRunFlag flag) |
| custom mission element callback | |
Enumerations | |
| enum | MissionType { MissionWP = 1 , MissionCircle = 2 , MissionSegment = 3 , MissionPath = 4 , MissionCustom = 5 } |
| enum | MissionInsertMode { Append , Prepend , ReplaceCurrent , ReplaceAll , ReplaceNexts } |
| enum | MissionRunFlag { MissionRun = 0 , MissionInit = 1 , MissionUpdate = 2 } |
Variables | |
| struct _mission | mission |
mission planner library
Provide the generic interface for the mission control Handle the parsing of datalink messages
Definition in file mission_common.h.
| struct _mission_wp |
Definition at line 59 of file mission_common.h.
Collaboration diagram for _mission_wp:| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | wp | |
| struct _mission_circle |
Definition at line 63 of file mission_common.h.
Collaboration diagram for _mission_circle:| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | center | |
| float | radius | |
| struct _mission_segment |
Definition at line 68 of file mission_common.h.
Collaboration diagram for _mission_segment:| Data Fields | ||
|---|---|---|
| struct EnuCoor_f | from | |
| struct EnuCoor_f | to | |
| struct _mission_path |
Definition at line 74 of file mission_common.h.
Collaboration diagram for _mission_path:| Data Fields | ||
|---|---|---|
| uint8_t | nb | |
| struct EnuCoor_f | path[MISSION_PATH_NB] | |
| uint8_t | path_idx | |
| struct _mission_registered |
Definition at line 91 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| mission_custom_cb | cb | navigation/action function callback |
| char | type[MISSION_TYPE_SIZE] | mission element identifier (5 char max + 1 \0) |
| struct _mission_custom |
Definition at line 96 of file mission_common.h.
Collaboration diagram for _mission_custom:| Data Fields | ||
|---|---|---|
| uint8_t | nb | number of parameters |
| float | params[MISSION_CUSTOM_MAX] | list of parameters |
| struct _mission_registered * | reg | pointer to a registered custom mission element |
| struct _mission_element |
Definition at line 102 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| float | duration | time to spend in the element (<= 0 to disable) |
| union _mission_element.element | element | |
| uint8_t | index | index of mission element |
| enum MissionType | type | |
| struct _mission |
Definition at line 130 of file mission_common.h.
Collaboration diagram for _mission:| Data Fields | ||
|---|---|---|
| uint8_t | current_idx | current mission element index |
| float | element_time | time in second spend in the current element |
| struct _mission_element | elements[MISSION_ELEMENT_NB] | |
| uint8_t | insert_idx | inserstion index |
| struct _mission_registered | registered[MISSION_REGISTER_NB] | |
| union _mission_element.element |
Definition at line 104 of file mission_common.h.
| Data Fields | ||
|---|---|---|
| struct _mission_circle | mission_circle | |
| struct _mission_custom | mission_custom | |
| struct _mission_path | mission_path | |
| struct _mission_segment | mission_segment | |
| struct _mission_wp | mission_wp | |
| #define MISSION_CUSTOM_MAX 12 |
Definition at line 80 of file mission_common.h.
| #define MISSION_ELEMENT_NB 20 |
Max number of elements in the tasks' list can be redefined.
Definition at line 120 of file mission_common.h.
| #define MISSION_PATH_NB 5 |
Definition at line 73 of file mission_common.h.
| #define MISSION_REGISTER_NB 6 |
Max number of registered nav/action callbacks can be redefined.
Definition at line 127 of file mission_common.h.
| #define MISSION_TYPE_SIZE 6 |
Definition at line 81 of file mission_common.h.
custom mission element callback
| [in] | nb | number of params |
| [in] | params | array of params with a maximum of 12 |
| [in] | init | true if the function is called for the first time |
Definition at line 89 of file mission_common.h.
Definition at line 45 of file mission_common.h.
| Enumerator | |
|---|---|
| MissionRun | normal run |
| MissionInit | first exec |
| MissionUpdate | param update |
Definition at line 53 of file mission_common.h.
| Enumerator | |
|---|---|
| MissionWP | |
| MissionCircle | |
| MissionSegment | |
| MissionPath | |
| MissionCustom | |
Definition at line 37 of file mission_common.h.
|
extern |
Get current mission element.
Definition at line 178 of file mission_common.c.
References _mission::current_idx, _mission::elements, foo, _mission::insert_idx, and mission.
Referenced by mission_run(), and mission_run().
Here is the caller graph for this function:
|
extern |
Get mission element by index.
Definition at line 162 of file mission_common.c.
References _mission::current_idx, _mission::elements, foo, _mission_element::index, _mission::insert_idx, mission, and MISSION_ELEMENT_NB.
Referenced by mission_insert(), and mission_parse_UPDATE().
Here is the caller graph for this function:Init mission structure.
Definition at line 65 of file mission_common.c.
References _mission_registered::cb, _mission::current_idx, DefaultPeriodic, _mission::element_time, foo, _mission::insert_idx, mission, MISSION_REGISTER_NB, MISSION_TYPE_SIZE, register_periodic_telemetry(), _mission::registered, send_mission_status(), and _mission_registered::type.
Here is the call graph for this function:
|
extern |
Insert a mission element according to the insertion mode.
| insert | insertion mode |
| element | mission element structure |
Definition at line 83 of file mission_common.c.
References Append, _mission::current_idx, _mission::element_time, _mission::elements, foo, _mission_element::index, _mission::insert_idx, mission, MISSION_ELEMENT_NB, mission_get_from_index(), Prepend, ReplaceAll, ReplaceCurrent, and ReplaceNexts.
Referenced by mission_parse_CIRCLE(), mission_parse_CIRCLE_LLA(), mission_parse_CUSTOM(), mission_parse_GOTO_WP(), mission_parse_GOTO_WP_LLA(), mission_parse_PATH(), mission_parse_PATH_LLA(), mission_parse_SEGMENT(), and mission_parse_SEGMENT_LLA().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 236 of file mission_common.c.
References foo, mission_insert(), MissionCircle, and _mission_element::type.
Here is the call graph for this function:Definition at line 254 of file mission_common.c.
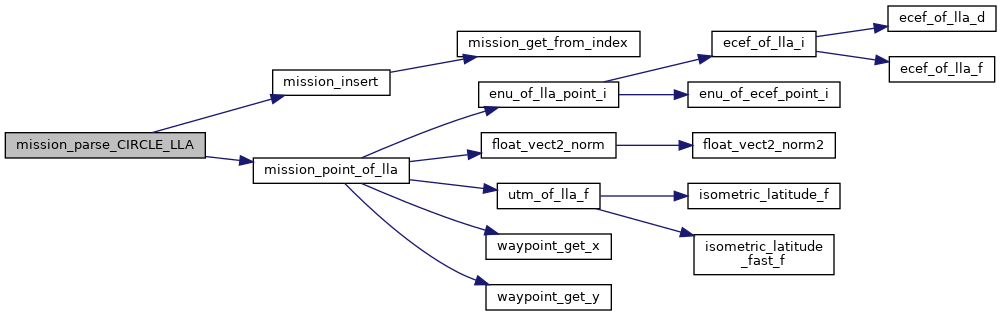
References LlaCoor_i::alt, foo, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), mission_point_of_lla(), MissionCircle, and _mission_element::type.
Here is the call graph for this function:Definition at line 392 of file mission_common.c.
References foo, mission_get_registered(), mission_insert(), MissionCustom, and _mission_element::type.
Here is the call graph for this function:Definition at line 474 of file mission_common.c.
References _mission::current_idx, _mission::element_time, foo, _mission::insert_idx, and mission.
Definition at line 446 of file mission_common.c.
References _mission::current_idx, _mission::element_time, foo, mission, and MISSION_ELEMENT_NB.
Parsing functions called when a mission message is received.
Definition at line 198 of file mission_common.c.
References foo, mission_insert(), MissionWP, and _mission_element::type.
Here is the call graph for this function:Definition at line 215 of file mission_common.c.
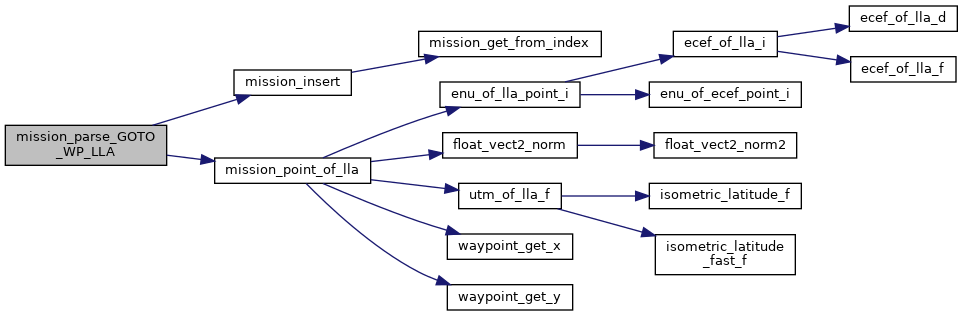
References LlaCoor_i::alt, foo, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), mission_point_of_lla(), MissionWP, and _mission_element::type.
Here is the call graph for this function:Definition at line 461 of file mission_common.c.
References _mission::current_idx, _mission::element_time, foo, _mission::insert_idx, mission, and MISSION_ELEMENT_NB.
Definition at line 321 of file mission_common.c.
References foo, mission_insert(), MISSION_PATH_NB, MissionPath, and _mission_element::type.
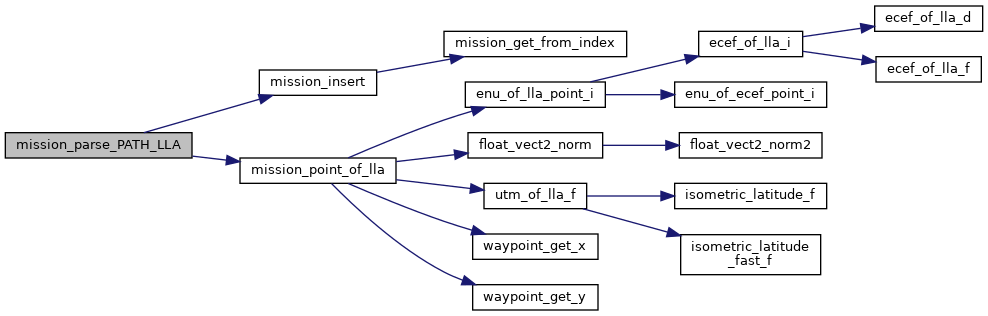
Here is the call graph for this function:Definition at line 353 of file mission_common.c.
References LlaCoor_i::alt, foo, LlaCoor_i::lat, LlaCoor_i::lon, mission_insert(), MISSION_PATH_NB, mission_point_of_lla(), MissionPath, and _mission_element::type.
Here is the call graph for this function:Definition at line 276 of file mission_common.c.
References foo, mission_insert(), MissionSegment, and _mission_element::type.
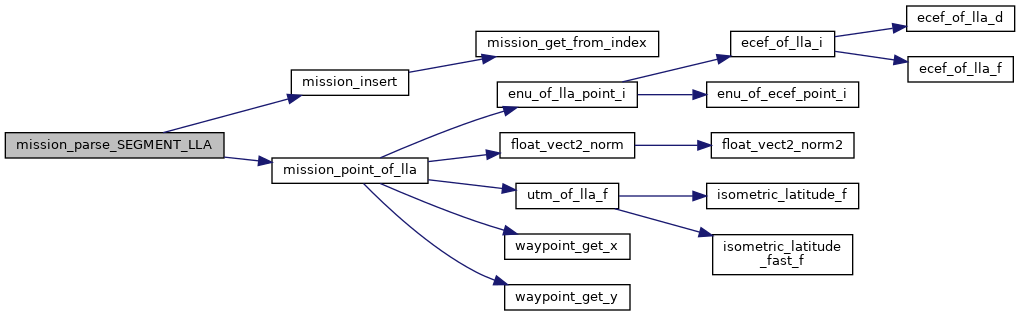
Here is the call graph for this function:Definition at line 296 of file mission_common.c.
References foo, LlaCoor_i::lat, mission_insert(), mission_point_of_lla(), MissionSegment, and _mission_element::type.
Here is the call graph for this function:Definition at line 414 of file mission_common.c.
References _mission_element::duration, foo, MISSION_CUSTOM_MAX, mission_get_from_index(), MissionCircle, MissionCustom, MissionPath, MissionSegment, MissionUpdate, and MissionWP.
Here is the call graph for this function:Get the ENU component of LLA mission point This function is firmware specific.
| point | pointer to the output ENU point (float) |
| lla | pointer to the input LLA coordinates (int) |
Get the ENU component of LLA mission point This function is firmware specific.
TODO: don't convert to float, either use double or do completely in fixed point
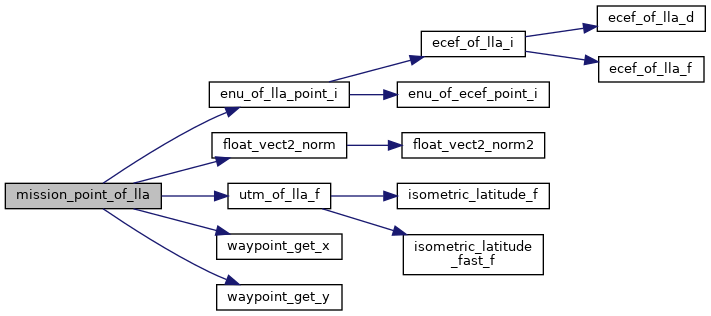
Definition at line 38 of file mission_fw_nav.c.
References LlaCoor_f::alt, LlaCoor_i::alt, BUFFER_ZONE_DIST, enu_of_lla_point_i(), float_vect2_norm(), foo, LLA_FLOAT_OF_BFP, max_dist_from_home, nav_utm_east0, nav_utm_north0, nav_utm_zone0, State::ned_initialized_i, state, stateGetHmslOrigin_i(), stateGetLlaOrigin_i(), stateGetNedOrigin_i(), utm_of_lla_f(), VECT2_DIFF, VECT2_SMUL, VECT2_SUM, VECT3_SMUL, waypoint_get_x(), waypoint_get_y(), waypoints, FloatVect2::x, point::x, FloatVect2::y, point::y, and UtmCoor_f::zone.
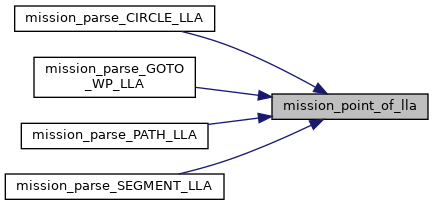
Referenced by mission_parse_CIRCLE_LLA(), mission_parse_GOTO_WP_LLA(), mission_parse_PATH_LLA(), and mission_parse_SEGMENT_LLA().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
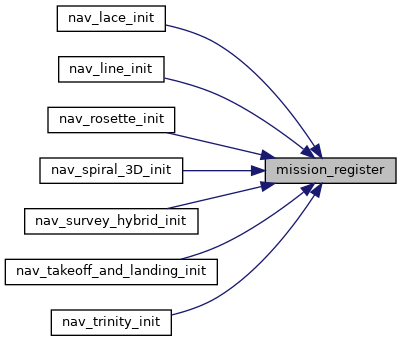
Register a new navigation or action callback function.
| cb | callback f(nb, param array) |
| type | string identifier with 5 characters max (+ 1 '\0' char) |
Definition at line 135 of file mission_common.c.
References _mission_registered::cb, foo, mission, MISSION_REGISTER_NB, MISSION_TYPE_SIZE, _mission::registered, and _mission_registered::type.
Referenced by nav_flower_init(), nav_lace_init(), nav_line_init(), nav_poles_init(), nav_rosette_init(), nav_spiral_3D_init(), nav_survey_hybrid_init(), nav_takeoff_and_landing_init(), and nav_trinity_init().
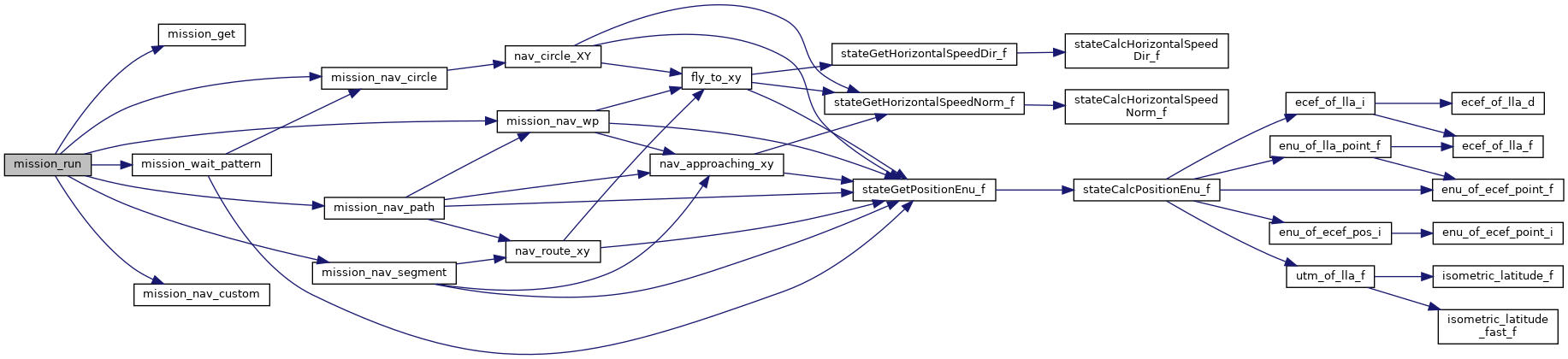
Here is the caller graph for this function:Run mission.
This function should be implemented into a dedicated file since navigation functions are different for different firmwares
Currently, this function should be called from the flight plan
Definition at line 192 of file mission_fw_nav.c.
References _mission::current_idx, dt_navigation, dt_navigation, dt_navigation, _mission::element_time, foo, mission, MISSION_ELEMENT_NB, mission_get(), mission_nav_circle(), mission_nav_circle(), mission_nav_circle(), mission_nav_custom(), mission_nav_custom(), mission_nav_custom(), mission_nav_path(), mission_nav_path(), mission_nav_path(), mission_nav_segment(), mission_nav_segment(), mission_nav_segment(), mission_nav_wp(), mission_nav_wp(), mission_nav_wp(), mission_wait_pattern(), mission_wait_pattern(), mission_wait_pattern(), mission_wait_started, mission_wait_started, mission_wait_started, MissionCircle, MissionCustom, MissionPath, MissionSegment, and MissionWP.
Here is the call graph for this function:Report mission status.
Send mission status over datalink
Definition at line 188 of file mission_common.c.
References DefaultChannel, DefaultDevice, and send_mission_status().
Here is the call graph for this function:
|
extern |
Definition at line 43 of file mission_common.c.
Referenced by mission_get(), mission_get_from_index(), mission_get_registered(), mission_init(), mission_insert(), mission_nav_circle(), mission_nav_circle(), mission_parse_END_MISSION(), mission_parse_GOTO_MISSION(), mission_parse_NEXT_MISSION(), mission_register(), mission_run(), mission_run(), and send_mission_status().