|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
BMI088 driver common functions (I2C and SPI). More...
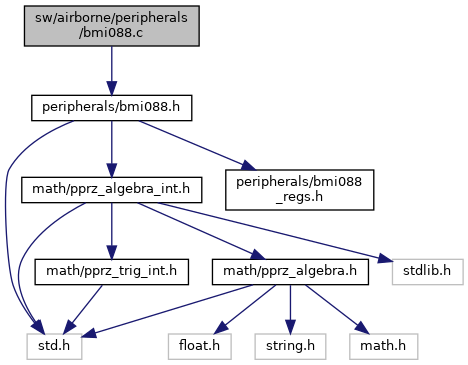
#include "peripherals/bmi088.h" Include dependency graph for bmi088.c:
Include dependency graph for bmi088.c:Go to the source code of this file.
Functions | |
| void | bmi088_set_default_config (struct Bmi088Config *c) |
| void | bmi088_send_config (Bmi088ConfigSet bmi_set, void *bmi, struct Bmi088Config *config) |
| Configuration sequence called once before normal use. | |
Variables | |
| const float | BMI088_GYRO_SENS [5] |
| const struct FloatRates | BMI088_GYRO_SENS_F [5] |
| const float | BMI088_ACCEL_SENS [4] |
| const struct FloatVect3 | BMI088_ACCEL_SENS_F [4] |
BMI088 driver common functions (I2C and SPI).
Still needs the either I2C or SPI specific implementation.
Definition in file bmi088.c.
| void bmi088_send_config | ( | Bmi088ConfigSet | bmi_set, |
| void * | bmi, | ||
| struct Bmi088Config * | config | ||
| ) |
Configuration sequence called once before normal use.
Definition at line 70 of file bmi088.c.
References BMI088_ACCEL_ACTIVE, BMI088_ACCEL_CONF, BMI088_ACCEL_ODR_100, BMI088_ACCEL_ODR_12, BMI088_ACCEL_ODR_1600, BMI088_ACCEL_ODR_200, BMI088_ACCEL_ODR_25, BMI088_ACCEL_ODR_400, BMI088_ACCEL_ODR_50, BMI088_ACCEL_ODR_800, BMI088_ACCEL_POWER_ON, BMI088_ACCEL_PWR_CONF, BMI088_ACCEL_PWR_CTRl, BMI088_ACCEL_RANGE, BMI088_CONF_ACCEL_ODR, BMI088_CONF_ACCEL_PWR_CONF, BMI088_CONF_ACCEL_PWR_CTRL, BMI088_CONF_ACCEL_RANGE, BMI088_CONF_DONE, BMI088_CONF_GYRO_ODR, BMI088_CONF_GYRO_PWR, BMI088_CONF_GYRO_RANGE, BMI088_CONFIG_ACCEL, BMI088_CONFIG_GYRO, BMI088_GYRO_BAND_WIDTH, BMI088_GYRO_LPM_1, BMI088_GYRO_NORMAL, BMI088_GYRO_ODR_1000_BW_116, BMI088_GYRO_ODR_100_BW_12, BMI088_GYRO_ODR_100_BW_32, BMI088_GYRO_ODR_2000_BW_230, BMI088_GYRO_ODR_2000_BW_532, BMI088_GYRO_ODR_200_BW_23, BMI088_GYRO_ODR_200_BW_64, BMI088_GYRO_ODR_400_BW_47, BMI088_GYRO_RANGE, config, and foo.
Referenced by bmi088_i2c_event(), and bmi088_i2c_start_configure().
Here is the caller graph for this function:| void bmi088_set_default_config | ( | struct Bmi088Config * | c | ) |
Definition at line 61 of file bmi088.c.
References Bmi088Config::accel_bw, Bmi088Config::accel_odr, Bmi088Config::accel_range, BMI088_DEFAULT_ACCEL_BW, BMI088_DEFAULT_ACCEL_ODR, BMI088_DEFAULT_ACCEL_RANGE, BMI088_DEFAULT_GYRO_ODR, BMI088_DEFAULT_GYRO_RANGE, Bmi088Config::gyro_odr, and Bmi088Config::gyro_range.
Referenced by bmi088_i2c_init().
Here is the caller graph for this function:| const struct FloatVect3 BMI088_ACCEL_SENS_F[4] |
| const struct FloatRates BMI088_GYRO_SENS_F[5] |