|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
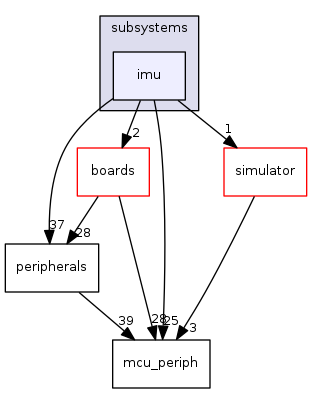
 Directory dependency graph for imu:
Directory dependency graph for imu:Files | |
| file | imu_analog.c [code] |
| file | imu_analog.h [code] |
| Inertial Measurement Unit using onboard ADCs. | |
| file | imu_ardrone2.c [code] |
| IMU implementation for ardrone2. | |
| file | imu_ardrone2.h [code] |
| IMU implementation for ardrone2. | |
| file | imu_aspirin.c [code] |
| Driver for the Aspirin v1.x IMU using SPI for the accelerometer. | |
| file | imu_aspirin.h [code] |
| Interface for the Aspirin v1.x IMU using SPI for the accelerometer. | |
| file | imu_aspirin_2_spi.c [code] |
| Driver for the Aspirin v2.x IMU using SPI for the MPU6000. | |
| file | imu_aspirin_2_spi.h [code] |
| Driver for the Aspirin v2.x IMU using SPI for the MPU6000. | |
| file | imu_aspirin_defaults.h [code] |
| Default sensitivity definitions for IMU Aspirin 1x. | |
| file | imu_aspirin_i2c.c [code] |
| file | imu_aspirin_i2c.h [code] |
| file | imu_b2.c [code] |
| Driver for the Booz2 IMUs. | |
| file | imu_b2.h [code] |
| Interface for the Booz2 IMUs. | |
| file | imu_bebop.c [code] |
| Driver for the Bebop (2) magnetometer, accelerometer and gyroscope. | |
| file | imu_bebop.h [code] |
| Interface for the Bebop magnetometer, accelerometer and gyroscope. | |
| file | imu_crista.c [code] |
| file | imu_crista.h [code] |
| file | imu_drotek_10dof_v2.c [code] |
| Driver for the Drotek 10DOF V2 IMU. | |
| file | imu_drotek_10dof_v2.h [code] |
| Driver for the Drotek 10DOF V2 IMU. | |
| file | imu_gl1.c [code] |
| Driver for I2C IMU using L3G4200, ADXL345, HMC5883 and BMP085. | |
| file | imu_gl1.h [code] |
| Interface for I2c IMU using using L3G4200, ADXL345, HMC5883 and BMP085. | |
| file | imu_gl1_defaults.h [code] |
| Default sensitivity definitions for IMU GL1. | |
| file | imu_mpu6000.c [code] |
| Driver for IMU with only MPU6000 via SPI. | |
| file | imu_mpu6000.h [code] |
| Driver for IMU with only MPU6000 via SPI. | |
| file | imu_mpu6000_hmc5883.c [code] |
| Driver for IMU with MPU6000 via SPI and HMC5883 via I2c. | |
| file | imu_mpu6000_hmc5883.h [code] |
| Driver for IMU with MPU6000 via SPI and HMC5883 via I2c. | |
| file | imu_mpu60x0_defaults.h [code] |
| Default sensitivity definitions for an IMU using the MPU60x0. | |
| file | imu_mpu60x0_i2c.c [code] |
| Driver for IMU with only MPU60X0 via I2C. | |
| file | imu_mpu60x0_i2c.h [code] |
| Driver for IMU with only MPU60x0 via I2C. | |
| file | imu_mpu9250_i2c.c [code] |
| IMU driver for the MPU9250 using I2C. | |
| file | imu_mpu9250_i2c.h [code] |
| IMU driver for the MPU9250 using I2C. | |
| file | imu_mpu9250_spi.c [code] |
| IMU driver for the MPU9250 using SPI. | |
| file | imu_mpu9250_spi.h [code] |
| IMU driver for the MPU9250 using SPI. | |
| file | imu_navstik.c [code] |
| Driver for the Navstik magnetometer, accelerometer and gyroscope. | |
| file | imu_navstik.h [code] |
| Interface for the Navstik magnetometer, accelerometer and gyroscope. | |
| file | imu_nps.c [code] |
| file | imu_nps.h [code] |
| file | imu_ppzuav.c [code] |
| file | imu_ppzuav.h [code] |
| Driver for the PPZUAV IMU. | |
| file | imu_px4_defaults.h [code] |
| Default sensitivity definitions for the Pixhawk IMU using the l3d20 gyro and lsm303dlc acc. | |
| file | imu_px4fmu.c [code] |
| Driver for the PX4FMU SPI1 for the MPU6000 and I2C2 for the HMC5883. | |
| file | imu_px4fmu.h [code] |
| Driver for the PX4FMU SPI1 for the MPU6000 and I2C2 for the HMC5883. | |
| file | imu_px4fmu_v2.4.c [code] |
| file | imu_px4fmu_v2.4.h [code] |
| Driver for pixhawk IMU's. | |
| file | imu_um6.c [code] |
| Driver for CH Robotics UM6 IMU/AHRS subsystem. | |
| file | imu_um6.h [code] |
| Driver for CH Robotics UM6 IMU/AHRS subsystem. | |
 1.8.8
1.8.8