|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
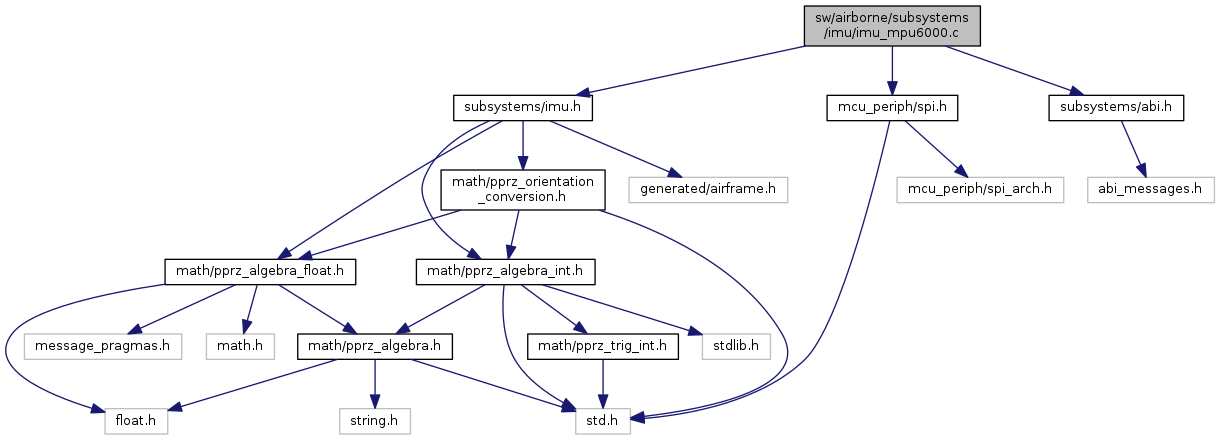
Driver for IMU with only MPU6000 via SPI. More...
 Include dependency graph for imu_mpu6000.c:
Include dependency graph for imu_mpu6000.c:Go to the source code of this file.
Macros | |
| #define | IMU_MPU_GYRO_RANGE MPU60X0_GYRO_RANGE_2000 |
| #define | IMU_MPU_ACCEL_RANGE MPU60X0_ACCEL_RANGE_16G |
Functions | |
| void | imu_mpu_spi_init (void) |
| void | imu_mpu_spi_periodic (void) |
| void | imu_mpu_spi_event (void) |
Variables | |
| struct ImuMpu6000 | imu_mpu_spi |
Driver for IMU with only MPU6000 via SPI.
Definition in file imu_mpu6000.c.
| #define IMU_MPU_ACCEL_RANGE MPU60X0_ACCEL_RANGE_16G |
Definition at line 65 of file imu_mpu6000.c.
Referenced by imu_mpu_spi_init().
| #define IMU_MPU_GYRO_RANGE MPU60X0_GYRO_RANGE_2000 |
Definition at line 60 of file imu_mpu6000.c.
Referenced by imu_mpu_spi_init().
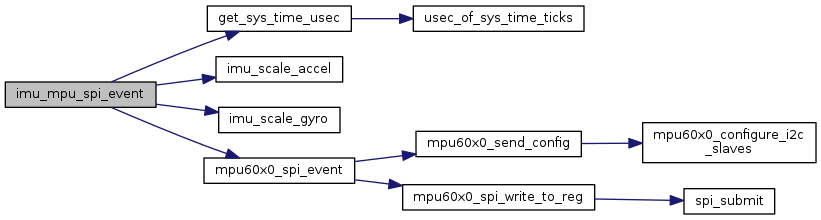
| void imu_mpu_spi_event | ( | void | ) |
Definition at line 88 of file imu_mpu6000.c.
References Imu::accel, Imu::accel_unscaled, Mpu60x0_Spi::data_accel, Mpu60x0_Spi::data_available, Mpu60x0_Spi::data_rates, get_sys_time_usec(), Imu::gyro, Imu::gyro_unscaled, imu, IMU_MPU6000_ID, imu_mpu_spi, imu_scale_accel(), imu_scale_gyro(), ImuMpu6000::mpu, mpu60x0_spi_event(), RATES_COPY, and VECT3_COPY.
Here is the call graph for this function:| void imu_mpu_spi_init | ( | void | ) |
Definition at line 72 of file imu_mpu6000.c.
References Mpu60x0Config::accel_range, Mpu60x0_Spi::config, Mpu60x0Config::dlpf_cfg, Mpu60x0Config::gyro_range, IMU_MPU_ACCEL_RANGE, IMU_MPU_GYRO_RANGE, ImuMpu6000::mpu, mpu60x0_spi_init(), and Mpu60x0Config::smplrt_div.
Here is the call graph for this function:| void imu_mpu_spi_periodic | ( | void | ) |
Definition at line 83 of file imu_mpu6000.c.
References imu_mpu_spi, ImuMpu6000::mpu, and mpu60x0_spi_periodic().
Here is the call graph for this function:| struct ImuMpu6000 imu_mpu_spi |
Definition at line 70 of file imu_mpu6000.c.
Referenced by imu_mpu_spi_event(), and imu_mpu_spi_periodic().
 1.8.8
1.8.8