|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS
v5.10_stable-5-g83a0da5-dirty
Paparazzi is a free software Unmanned Aircraft System.
|
Driver for the Booz2 IMUs. More...
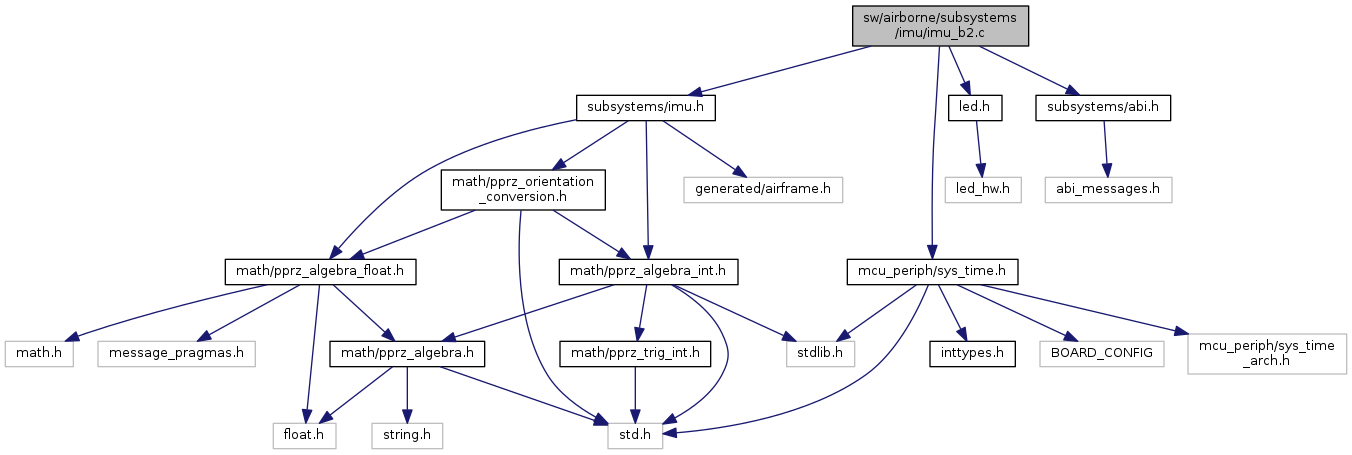
#include "subsystems/imu.h"#include "led.h"#include "subsystems/abi.h"#include "mcu_periph/sys_time.h" Include dependency graph for imu_b2.c:
Include dependency graph for imu_b2.c:Go to the source code of this file.
Macros | |
| #define | ImuMagEvent() {} |
| Event functions for imu_b2. More... | |
Functions | |
| void | imu_b2_init (void) |
| void | imu_b2_periodic (void) |
| void | imu_b2_event (void) |
Variables | |
| struct ImuBooz2 | imu_b2 |
Driver for the Booz2 IMUs.
Analog gyros and accelerometers are read via MAX1168 16-bit SPI ADC. Depending on version, different I2C or SPI magnetometers are used.
Definition in file imu_b2.c.
| #define ImuMagEvent | ( | ) | {} |
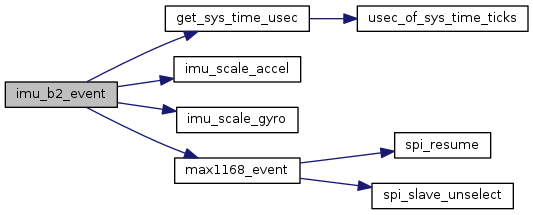
| void imu_b2_event | ( | void | ) |
Definition at line 152 of file imu_b2.c.
References Imu::accel, Imu::accel_unscaled, get_sys_time_usec(), Imu::gyro, Imu::gyro_unscaled, imu, IMU_ACCEL_X_CHAN, IMU_ACCEL_Y_CHAN, IMU_ACCEL_Z_CHAN, IMU_ASPIRIN2_ID, IMU_GYRO_P_CHAN, IMU_GYRO_Q_CHAN, IMU_GYRO_R_CHAN, imu_scale_accel(), imu_scale_gyro(), ImuMagEvent, MAX1168_DATA_AVAILABLE, max1168_event(), MAX1168_IDLE, max1168_status, max1168_values, Int32Rates::p, Int32Rates::q, Int32Rates::r, Int32Vect3::x, Int32Vect3::y, and Int32Vect3::z.
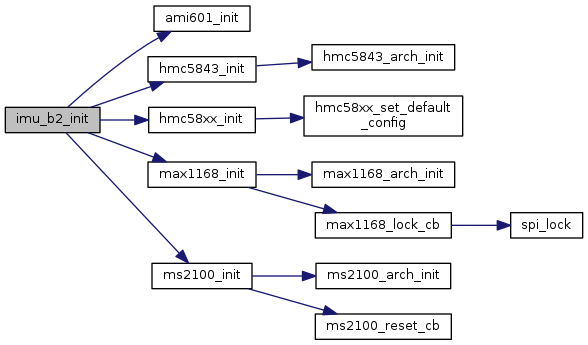
Here is the call graph for this function:| void imu_b2_init | ( | void | ) |
Definition at line 38 of file imu_b2.c.
References ami601_init(), hmc5843_init(), HMC58XX_ADDR, hmc58xx_init(), HMC_TYPE_5843, imu_b2, max1168_init(), ms2100, and ms2100_init().
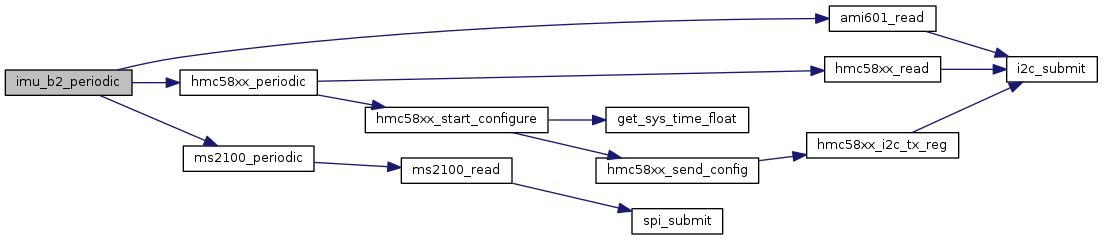
Here is the call graph for this function:| void imu_b2_periodic | ( | void | ) |
Definition at line 57 of file imu_b2.c.
References ami601_read(), hmc58xx_periodic(), imu_b2, Max1168Periodic, ms2100, and ms2100_periodic().
Here is the call graph for this function:| struct ImuBooz2 imu_b2 |
Definition at line 34 of file imu_b2.c.
Referenced by imu_b2_init(), and imu_b2_periodic().
 1.8.8
1.8.8