|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.0_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
Rotorcraft specific autopilot interface and initialization. More...
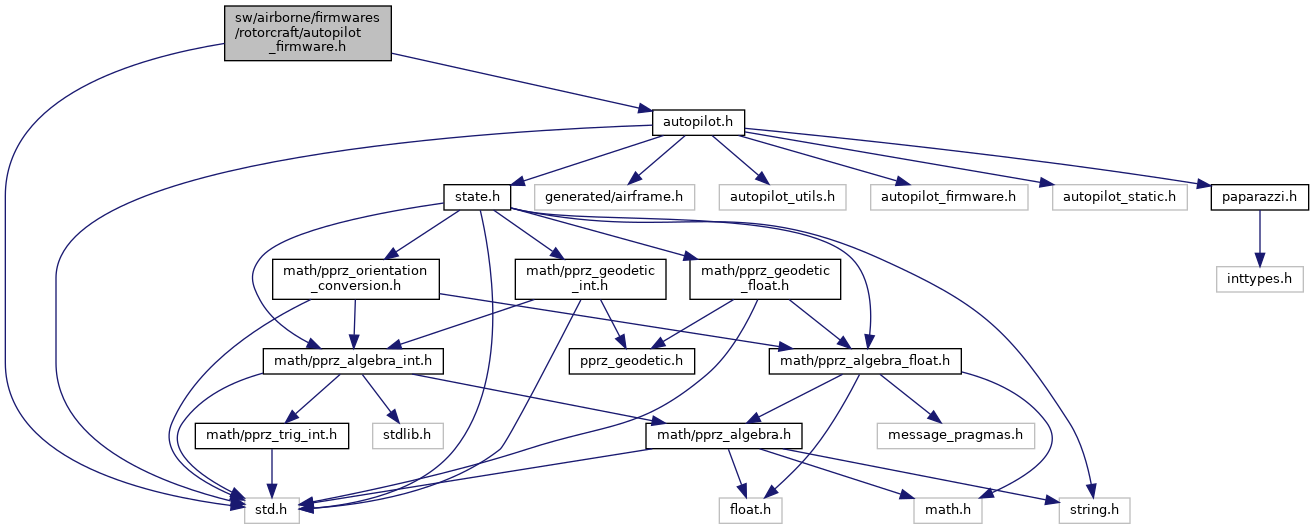
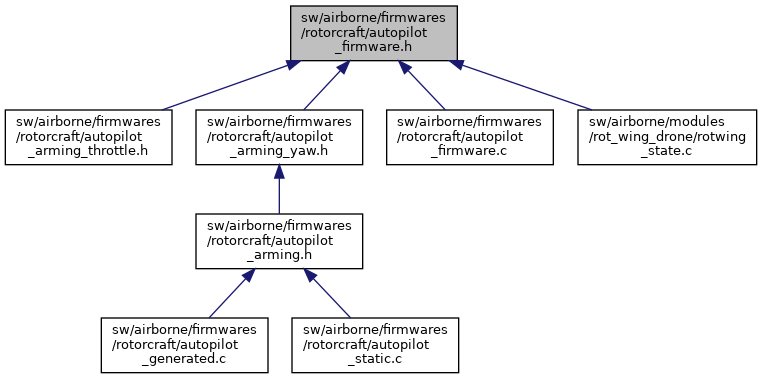
 Include dependency graph for autopilot_firmware.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for autopilot_firmware.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Functions | |
| bool | autopilot_ground_detection (void) |
| Default ground-detection estimation based on accelerometer shock. | |
| bool | autopilot_in_flight_end_detection (bool motors_on) |
| Default end-of-in-flight detection estimation based on thrust and speed. | |
| void | autopilot_firmware_init (void) |
| Init function. | |
Variables | |
| uint8_t | autopilot_mode_auto2 |
Rotorcraft specific autopilot interface and initialization.
Definition in file autopilot_firmware.h.
Init function.
Definition at line 157 of file autopilot_firmware.c.
Default ground-detection estimation based on accelerometer shock.
Definition at line 81 of file autopilot_firmware.c.
References stateGetAccelNed_f(), THRESHOLD_GROUND_DETECT, and NedCoor_f::z.
Referenced by autopilot_event().
Here is the call graph for this function: Here is the caller graph for this function:Default end-of-in-flight detection estimation based on thrust and speed.
Definition at line 92 of file autopilot_firmware.c.
References autopilot_in_flight_counter, AUTOPILOT_IN_FLIGHT_MIN_ACCEL, AUTOPILOT_IN_FLIGHT_MIN_SPEED, AUTOPILOT_IN_FLIGHT_MIN_THRUST, AUTOPILOT_IN_FLIGHT_TIME, Stabilization::cmd, foo, stabilization, stateGetAccelNed_f(), stateGetSpeedNed_f(), and NedCoor_f::z.
Referenced by autopilot_check_in_flight().
Here is the call graph for this function: Here is the caller graph for this function:
|
extern |
Definition at line 49 of file autopilot_firmware.c.
Referenced by autopilot_firmware_init(), and guidance_flip_run().