|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
#include "modules/ctrl/eff_scheduling_rotwing.h"#include "generated/airframe.h"#include "state.h"#include "firmwares/rotorcraft/stabilization/stabilization_indi.h"#include "firmwares/rotorcraft/guidance/guidance_indi_hybrid.h"#include "modules/rotwing_drone/rotwing_state.h"#include "autopilot.h"#include "modules/actuators/actuators.h"#include "modules/core/abi.h" Include dependency graph for eff_scheduling_rotwing.c:
Include dependency graph for eff_scheduling_rotwing.c:Go to the source code of this file.
Macros | |
| #define | WING_ROTATION_CAN_ROTWING_ID ABI_BROADCAST |
| ABI binding wing position data. | |
| #define | AIRSPEED_IMPORTANCE_IN_FORWARD_WEIGHT 16 |
Variables | |
| struct rotwing_eff_sched_param_t | eff_sched_p |
| int32_t | rw_flap_offset = 0 |
| float | eff_sched_pusher_time = 0.002 |
| float | roll_eff_slider = 12.f |
| static const float | Wu_gih_original [GUIDANCE_INDI_HYBRID_U] = GUIDANCE_INDI_WLS_WU |
| struct rotwing_eff_sched_var_t | eff_sched_var |
| static abi_event | wing_position_ev |
| float | eff_scheduling_rotwing_lift_d = 0.0f |
Definition in file eff_scheduling_rotwing.c.
| #define AIRSPEED_IMPORTANCE_IN_FORWARD_WEIGHT 16 |
| #define WING_ROTATION_CAN_ROTWING_ID ABI_BROADCAST |
ABI binding wing position data.
Definition at line 199 of file eff_scheduling_rotwing.c.
Definition at line 154 of file eff_scheduling_rotwing.c.
References foo.
Referenced by eff_scheduling_rotwing_update_aileron_effectiveness(), and eff_scheduling_rotwing_update_hover_motor_effectiveness().
Here is the caller graph for this function:Definition at line 218 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::airspeed, rotwing_eff_sched_var_t::airspeed2, rotwing_eff_sched_var_t::cmd_elevator, rotwing_eff_sched_var_t::cmd_pusher, rotwing_eff_sched_var_t::cmd_pusher_scaled, rotwing_eff_sched_var_t::cmd_T_mean_scaled, rotwing_eff_sched_var_t::cosr, rotwing_eff_sched_var_t::cosr2, rotwing_eff_sched_param_t::DMdpprz_hover_pitch, rotwing_eff_sched_param_t::DMdpprz_hover_roll, eff_sched_p, eff_sched_var, foo, rotwing_eff_sched_var_t::Ixx, rotwing_eff_sched_param_t::Ixx_body, rotwing_eff_sched_param_t::Ixx_wing, rotwing_eff_sched_var_t::Iyy, rotwing_eff_sched_param_t::Iyy_body, rotwing_eff_sched_param_t::Iyy_wing, rotwing_eff_sched_var_t::pitch_motor_dMdpprz, rotwing_eff_sched_var_t::roll_motor_dMdpprz, rotwing_eff_sched_var_t::sinr, rotwing_eff_sched_var_t::sinr2, rotwing_eff_sched_var_t::sinr3, wing_position_cb(), wing_position_ev, WING_ROTATION_CAN_ROTWING_ID, rotwing_eff_sched_var_t::wing_rotation_deg, and rotwing_eff_sched_var_t::wing_rotation_rad.
Here is the call graph for this function:Definition at line 248 of file eff_scheduling_rotwing.c.
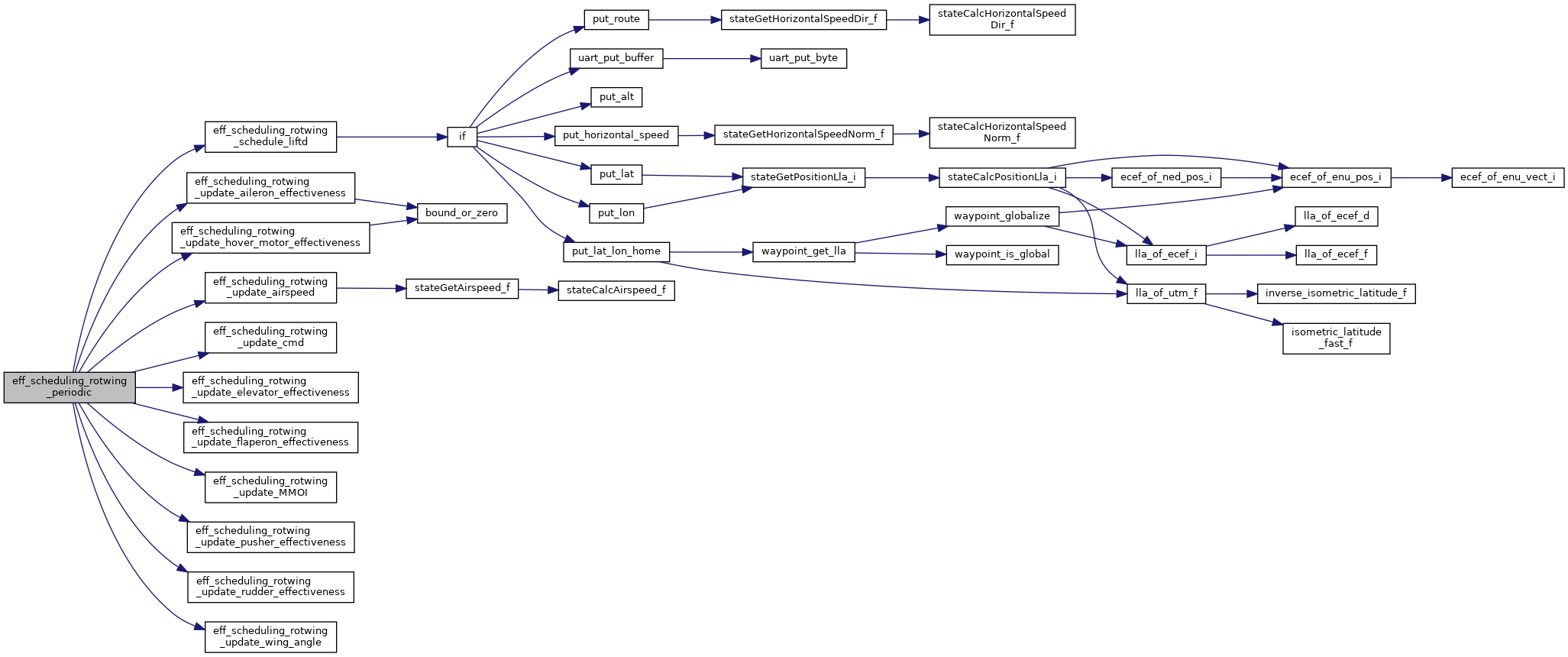
References eff_scheduling_rotwing_schedule_liftd(), eff_scheduling_rotwing_update_aileron_effectiveness(), eff_scheduling_rotwing_update_airspeed(), eff_scheduling_rotwing_update_cmd(), eff_scheduling_rotwing_update_elevator_effectiveness(), eff_scheduling_rotwing_update_flaperon_effectiveness(), eff_scheduling_rotwing_update_hover_motor_effectiveness(), eff_scheduling_rotwing_update_MMOI(), eff_scheduling_rotwing_update_pusher_effectiveness(), eff_scheduling_rotwing_update_rudder_effectiveness(), and eff_scheduling_rotwing_update_wing_angle().
Here is the call graph for this function:Definition at line 435 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::airspeed2, eff_sched_p, eff_sched_var, eff_scheduling_rotwing_lift_d, foo, rotwing_eff_sched_param_t::k_lift_fuselage, rotwing_eff_sched_param_t::k_lift_tail, rotwing_eff_sched_param_t::k_lift_wing, rotwing_eff_sched_param_t::m, rotwing_eff_sched_var_t::sinr2, and rotwing_eff_sched_var_t::wing_rotation_deg.
Referenced by eff_scheduling_rotwing_periodic().
Here is the caller graph for this function:Definition at line 399 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::airspeed2, bound_or_zero(), rotwing_eff_sched_var_t::cosr, eff_sched_p, eff_sched_var, foo, g1g2, rotwing_eff_sched_var_t::Ixx, rotwing_eff_sched_var_t::Iyy, rotwing_eff_sched_param_t::k_aileron, rotwing_eff_sched_var_t::sinr2, and rotwing_eff_sched_var_t::sinr3.
Referenced by eff_scheduling_rotwing_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 301 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::airspeed, rotwing_eff_sched_var_t::airspeed2, eff_sched_var, foo, and stateGetAirspeed_f().
Referenced by eff_scheduling_rotwing_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 292 of file eff_scheduling_rotwing.c.
References actuator_state_filt_vect, rotwing_eff_sched_var_t::cmd_elevator, rotwing_eff_sched_var_t::cmd_pusher, rotwing_eff_sched_var_t::cmd_pusher_scaled, rotwing_eff_sched_var_t::cmd_T_mean_scaled, and eff_sched_var.
Referenced by eff_scheduling_rotwing_periodic().
Here is the caller graph for this function:Definition at line 359 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::airspeed, rotwing_eff_sched_var_t::airspeed2, rotwing_eff_sched_var_t::cmd_elevator, rotwing_eff_sched_var_t::cmd_pusher_scaled, eff_sched_p, eff_sched_var, foo, g1g2, rotwing_eff_sched_var_t::Iyy, rotwing_eff_sched_param_t::k_elevator, and rotwing_eff_sched_param_t::k_elevator_deflection.
Referenced by eff_scheduling_rotwing_periodic().
Here is the caller graph for this function:Definition at line 412 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::airspeed2, eff_sched_p, eff_sched_var, foo, g1g2, rotwing_eff_sched_var_t::Ixx, rotwing_eff_sched_param_t::k_flaperon, and rotwing_eff_sched_var_t::sinr3.
Referenced by eff_scheduling_rotwing_periodic().
Here is the caller graph for this function:Definition at line 309 of file eff_scheduling_rotwing.c.
References actuator_state_filt_vect, rotwing_eff_sched_var_t::airspeed, autopilot, bound_or_zero(), rotwing_eff_sched_var_t::cosr, rotwing_eff_sched_param_t::DMdpprz_hover_pitch, rotwing_eff_sched_param_t::DMdpprz_hover_roll, eff_sched_p, eff_sched_var, foo, g1g2, rotwing_eff_sched_param_t::hover_roll_pitch_coef, rotwing_eff_sched_param_t::hover_roll_roll_coef, pprz_autopilot::in_flight, rotwing_eff_sched_var_t::Ixx, rotwing_eff_sched_var_t::Iyy, MAX_PPRZ, rotwing_eff_sched_var_t::pitch_motor_dMdpprz, rotwing_eff_sched_var_t::roll_motor_dMdpprz, rotwing_eff_sched_var_t::sinr, and rotwing_eff_sched_var_t::wing_rotation_rad.
Referenced by eff_scheduling_rotwing_periodic().
Here is the call graph for this function: Here is the caller graph for this function:Definition at line 282 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::cosr2, eff_sched_p, eff_sched_var, foo, rotwing_eff_sched_var_t::Ixx, rotwing_eff_sched_param_t::Ixx_body, rotwing_eff_sched_param_t::Ixx_wing, rotwing_eff_sched_var_t::Iyy, rotwing_eff_sched_param_t::Iyy_body, rotwing_eff_sched_param_t::Iyy_wing, and rotwing_eff_sched_var_t::sinr2.
Referenced by eff_scheduling_rotwing_periodic().
Here is the caller graph for this function:Definition at line 420 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::airspeed, rotwing_eff_sched_var_t::cmd_pusher, eff_sched_p, eff_sched_var, foo, g1g2, rotwing_eff_sched_param_t::k_pusher, rotwing_eff_sched_param_t::k_rpm_pprz_pusher, and rotwing_eff_sched_param_t::m.
Referenced by eff_scheduling_rotwing_periodic().
Here is the caller graph for this function:Definition at line 381 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::airspeed2, rotwing_eff_sched_var_t::cmd_pusher_scaled, rotwing_eff_sched_var_t::cmd_T_mean_scaled, rotwing_eff_sched_var_t::cosr, rotwing_eff_sched_param_t::d_rudder_d_pprz, eff_sched_p, eff_sched_var, foo, g1g2, rotwing_eff_sched_param_t::Izz, and rotwing_eff_sched_param_t::k_rudder.
Referenced by eff_scheduling_rotwing_periodic().
Here is the caller graph for this function:Definition at line 267 of file eff_scheduling_rotwing.c.
References rotwing_eff_sched_var_t::cosr, rotwing_eff_sched_var_t::cosr2, eff_sched_var, foo, rotwing_eff_sched_var_t::sinr, rotwing_eff_sched_var_t::sinr2, rotwing_eff_sched_var_t::sinr3, rotwing_eff_sched_var_t::wing_rotation_deg, and rotwing_eff_sched_var_t::wing_rotation_rad.
Referenced by eff_scheduling_rotwing_periodic().
Here is the caller graph for this function:Definition at line 450 of file eff_scheduling_rotwing.c.
References eff_scheduling_rotwing_lift_d.
|
inline |
Definition at line 485 of file eff_scheduling_rotwing.c.
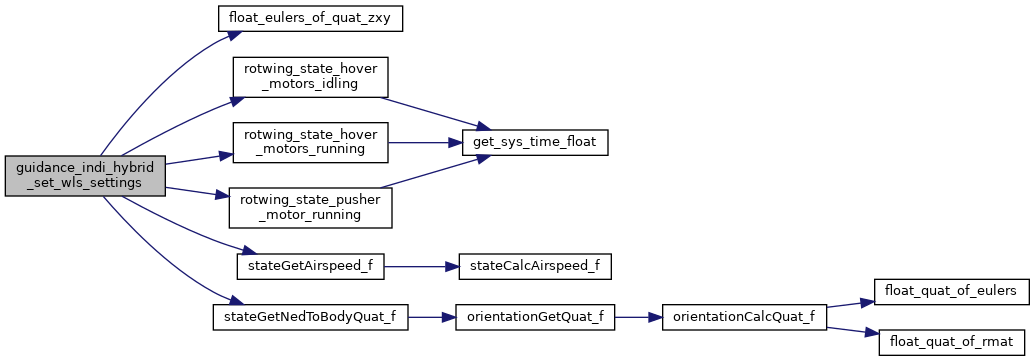
References actuator_state_filt_vect, AIRSPEED_IMPORTANCE_IN_FORWARD_WEIGHT, eulers_zxy, float_eulers_of_quat_zxy(), foo, rotwing_state_t::fw_min_airspeed, g1g2, guidance_indi_max_bank, GUIDANCE_INDI_MAX_PITCH, GUIDANCE_INDI_MIN_PITCH, guidance_indi_pitch_pref_deg, MAX_PPRZ, rotwing_state_t::meas_skew_angle_deg, ROTWING_QUAD_PREF_PITCH, ROTWING_SKEW_ANGLE_STEP, rotwing_state, rotwing_state_hover_motors_idling(), rotwing_state_hover_motors_running(), rotwing_state_pusher_motor_running(), stateGetAirspeed_f(), stateGetNedToBodyQuat_f(), and Wu_gih_original.
Here is the call graph for this function:Function that sets the u_min, u_max and u_pref if function not elsewhere defined.
Definition at line 454 of file eff_scheduling_rotwing.c.
References act_is_servo, act_pref, actuator_state_filt_vect, actuators_pprz, eff_sched_pusher_time, foo, MAX_PPRZ, rw_flap_offset, WLS_t::u_max, WLS_t::u_min, WLS_t::u_pref, and wls_stab_p.
|
static |
Definition at line 204 of file eff_scheduling_rotwing.c.
References eff_sched_var, foo, and rotwing_eff_sched_var_t::wing_rotation_rad.
Referenced by eff_scheduling_rotwing_init().
Here is the caller graph for this function:| struct rotwing_eff_sched_param_t eff_sched_p |
Definition at line 127 of file eff_scheduling_rotwing.c.
Referenced by eff_scheduling_rotwing_init(), eff_scheduling_rotwing_schedule_liftd(), eff_scheduling_rotwing_update_aileron_effectiveness(), eff_scheduling_rotwing_update_elevator_effectiveness(), eff_scheduling_rotwing_update_flaperon_effectiveness(), eff_scheduling_rotwing_update_hover_motor_effectiveness(), eff_scheduling_rotwing_update_MMOI(), eff_scheduling_rotwing_update_pusher_effectiveness(), and eff_scheduling_rotwing_update_rudder_effectiveness().
| float eff_sched_pusher_time = 0.002 |
Definition at line 172 of file eff_scheduling_rotwing.c.
Referenced by stabilization_indi_set_wls_settings().
| struct rotwing_eff_sched_var_t eff_sched_var |
Definition at line 177 of file eff_scheduling_rotwing.c.
Referenced by eff_scheduling_rotwing_init(), eff_scheduling_rotwing_schedule_liftd(), eff_scheduling_rotwing_update_aileron_effectiveness(), eff_scheduling_rotwing_update_airspeed(), eff_scheduling_rotwing_update_cmd(), eff_scheduling_rotwing_update_elevator_effectiveness(), eff_scheduling_rotwing_update_flaperon_effectiveness(), eff_scheduling_rotwing_update_hover_motor_effectiveness(), eff_scheduling_rotwing_update_MMOI(), eff_scheduling_rotwing_update_pusher_effectiveness(), eff_scheduling_rotwing_update_rudder_effectiveness(), eff_scheduling_rotwing_update_wing_angle(), and wing_position_cb().
| float eff_scheduling_rotwing_lift_d = 0.0f |
Definition at line 433 of file eff_scheduling_rotwing.c.
Referenced by eff_scheduling_rotwing_schedule_liftd(), and guidance_indi_get_liftd().
Definition at line 173 of file eff_scheduling_rotwing.c.
| int32_t rw_flap_offset = 0 |
Definition at line 151 of file eff_scheduling_rotwing.c.
Referenced by stabilization_indi_set_wls_settings().
|
static |
Definition at line 202 of file eff_scheduling_rotwing.c.
Referenced by eff_scheduling_rotwing_init().
|
static |
Definition at line 175 of file eff_scheduling_rotwing.c.
Referenced by guidance_indi_hybrid_set_wls_settings().