|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
|
Paparazzi UAS v7.1_unstable
Paparazzi is a free software Unmanned Aircraft System.
|
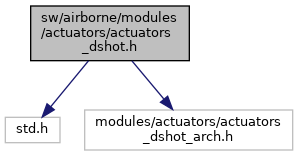
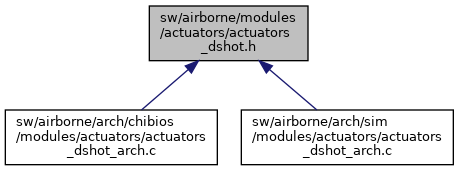
#include "std.h" Include dependency graph for actuators_dshot.h: This graph shows which files directly or indirectly include this file:
Include dependency graph for actuators_dshot.h: This graph shows which files directly or indirectly include this file:Go to the source code of this file.
Data Structures | |
| struct | dshot |
Macros | |
| #define | ACTUATORS_DSHOT_OFFSET 48 |
| In normal DSHOT, first 48 values are special commands this offset allow to use 0 as the no-throttle command This should not be changed unless you know what you are doing. | |
| #define | ACTUATORS_DSHOT_NB (8+1) |
| Maxnum number of DSHOT commands This should be large enough for max applications: 8 motors +1 in case motor count starts at 1 and not 0. | |
| #define | ActuatorDShotSet actuators_dshot_set |
| #define | ActuatorsDShotInit actuators_dshot_arch_init |
| #define | ActuatorsDShotCommit actuators_dshot_arch_commit |
Functions | |
| void | actuators_dshot_arch_init (void) |
| Arch dependent init. | |
| void | actuators_dshot_arch_commit (void) |
| void | actuators_dshot_set (uint8_t idx, int16_t value) |
Variables | |
| struct dshot | actuators_dshot_values [ACTUATORS_DSHOT_NB] |
Definition in file actuators_dshot.h.
| struct dshot |
| #define ActuatorDShotSet actuators_dshot_set |
Definition at line 67 of file actuators_dshot.h.
| #define ACTUATORS_DSHOT_NB (8+1) |
Maxnum number of DSHOT commands This should be large enough for max applications: 8 motors +1 in case motor count starts at 1 and not 0.
Definition at line 45 of file actuators_dshot.h.
| #define ACTUATORS_DSHOT_OFFSET 48 |
In normal DSHOT, first 48 values are special commands this offset allow to use 0 as the no-throttle command This should not be changed unless you know what you are doing.
Definition at line 37 of file actuators_dshot.h.
| #define ActuatorsDShotCommit actuators_dshot_arch_commit |
Definition at line 69 of file actuators_dshot.h.
| #define ActuatorsDShotInit actuators_dshot_arch_init |
Definition at line 68 of file actuators_dshot.h.
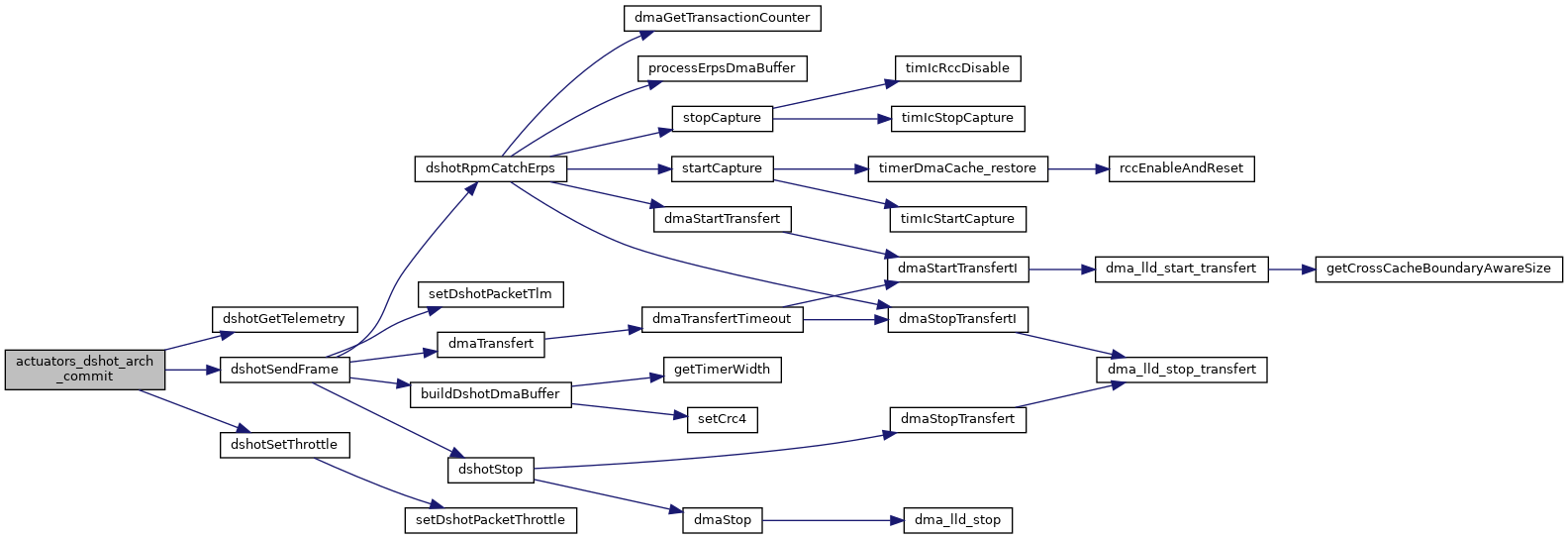
Definition at line 291 of file actuators_dshot_arch.c.
References ACT_FEEDBACK_DSHOT_ID, ACTUATORS_DSHOT_NB, actuators_dshot_private, actuators_dshot_values, dshot::current, DSHOT_BIDIR_ERR_CRC, DSHOT_BIDIR_TLM_EDT, DSHOT_MOTOR_POLES, dshotGetTelemetry(), dshotSendFrame(), dshotSetThrottle(), dshot::energy, foo, act_feedback_t::idx, act_feedback_t::act_feedback_set_t::rpm, act_feedback_t::rpm, dshot::rpm, rpm, act_feedback_t::set, dshot::temp, and dshot::voltage.
Here is the call graph for this function:Arch dependent init.
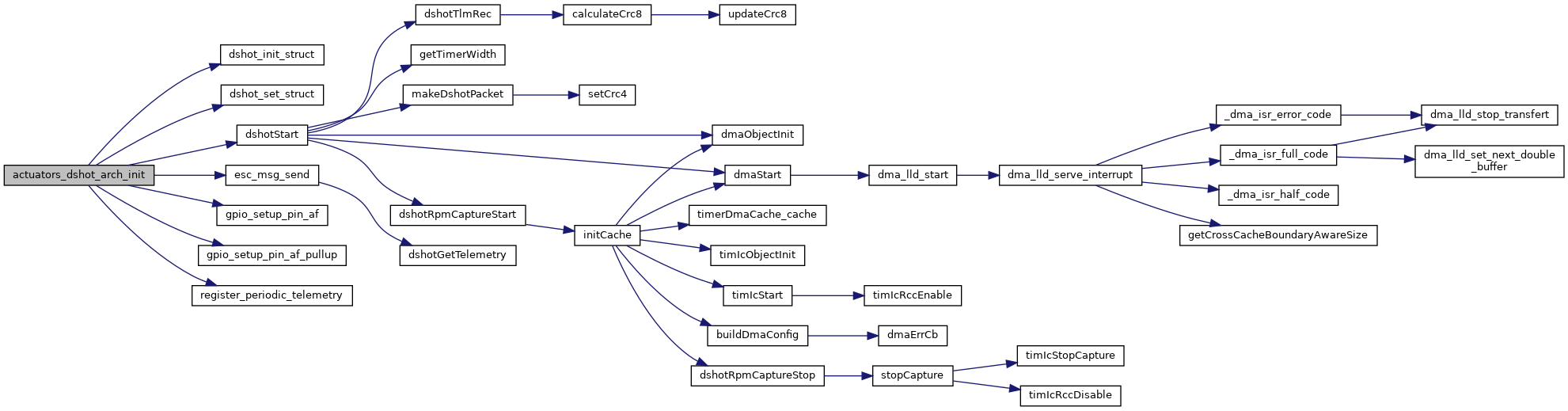
Definition at line 153 of file actuators_dshot_arch.c.
References ACTUATORS_DSHOT_NB, actuators_dshot_private, actuators_dshot_values, CONCAT_GPIO, DefaultPeriodic, dshot_init_struct(), dshot_set_struct(), dshotStart(), esc_msg_send(), FALSE, foo, gpio_setup_pin_af(), gpio_setup_pin_af_pullup(), PRINT_CONFIG_VAR(), and register_periodic_telemetry().
Here is the call graph for this function:Definition at line 30 of file actuators_dshot.c.
References ACTUATORS_DSHOT_OFFSET, actuators_dshot_values, dshot::cmd, and idx.
|
extern |
Definition at line 28 of file actuators_dshot.c.
Referenced by actuators_dshot_arch_commit(), actuators_dshot_arch_init(), actuators_dshot_set(), and esc_msg_send().